
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Объективный контроль над процессом пуска двигателя осуществляется реле ускорения, а не оператором. Это позволяет быстрее и надежнее управлять краном, защищать двигатель от возникновения чрезмерных токов, вызывающих при частых включениях его перегрев и выход из строя. Кроме того, снижаются динамические усилия а канатах и редукторах, что увеличивает срок службы механического оборудования крана.
В положении командоконтроллера 3 при опускании груза включается контактор KM6, в результате чего срабатывают блокировочное реле KM7 и контакторы КМ15 и KM8, а за ними – контакторы КМ3, KM9. Статор двигателя подключается к двум фазам сети контакторами KM3, KM6. Если командоконтроллер находится в положении 3, то электропривод имеет относительно пологую механическую характеристику, что при нагрузках от 0 до МН позволяет получить скорость, не превышающую допустимую. Это обстоятельство повышает надежность работы электропривода и дает возможность оператору работать с меньшим напряжением.
Если скорость опускания груза в положении 3 не обеспечивает необходимого режима работы, в магнитном контроллере КС имеются возможности изменить ее. При передвижении рукоятки командоконтроллера к нулю можно получить два режима противовключения. Один из них используется для спуска относительно тяжелых грузов. Положение 4 обеспечивает получение основной и промежуточной характеристик электропривода. Эти режимы пригодны для силового спуска легких грузов или для работы со скоростью выше синхронной при спуске тяжелых грузов.
В качестве альтернативы можно использовать тиристорные крановые панели управления ДЭТП - 3. Они предназначены для замены крановых магнитных контроллеров и являются их бесконтактными функциональными аналогами. Панелями могут оснащаться механизмы подъема грузоподъемных кранов, оснащенных асинхронными электродвигателями с фазным ротором. Коммутация всех силовых цепей ротора и статора электродвигателя осуществляется тиристрными контакторами. Все узлы панели управляются программируемым логическим контроллером.
Панели ДЭТП-3 отличаются от магнитных контроллеров высокой надежностью вследствие отсутствия в силовых цепях механических контактов. Осуществление в них пуска в функции времени защищает электропривод от неправильных действий машиниста крана. Оптимальные выдержки времени при переключении статорных и роторных цепей обеспечивает долговечность работы крановых механизмов за счет уменьшения динамических нагрузок. Панели управления практически не требуют обслуживания в процессе эксплуатации, отличаются простотой настройки и запуска в работу электропривода. В панелях предусмотрена максимально-токовая и конечная защита электропривода.
Для механизма подъема крана целесообразно использовать панель управления типа ДЭТП-3-125(1)2Т6-5, которая является аналогом магнитного контроллера КС-400. Панель (рис.6.3) построена по бесконтактной схеме и для управления электродвигателем используются тиристорные коммутаторы в статорной и роторной цепи, где коммутирую пять ступеней активных сопротивлений в обоих направлениях вращения.
Панель ДЭТП-3-125(1)2Т6-5 реализует бесконтактное переключение фаз статора электродвигателя для изменения направления вращения.
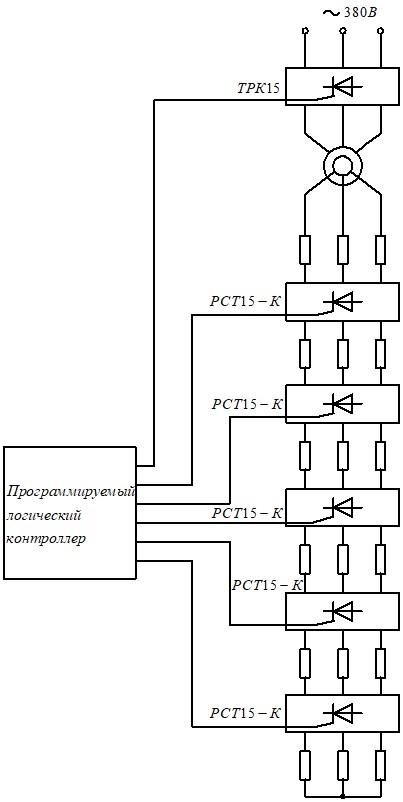
Рисунок 6.3 - Функциональная схема панели ДЭТП-3-125(1)2Т6-5
Панель обеспечивает пуск электродвигателя в функции времени с необходимыми выдержками времени при переключении ступеней. Кроме того, с её помощью можно реализовать спуск груза на полной скорости, а также спуск легкого и тяжелого груза на пониженной скорости в режиме торможения противключением.
Панель обеспечивает защиту от снижения напряжения, от короткого замыкания и конечную защиту электродвигателя.
ЗАКЛЮЧЕНИЕ
В данной курсовой работе был рассчитан крановый электропривод механизма подъема, для которого был выбран электродвигатель, обеспечивающий заданный режим работы, сам электропривод и систему управления к нему.
Курсовая работа ставит своей целью закрепить, систематизировать и углубить теоретические знания, научиться применять эти знания при решении производственно-технических задач, привить навыки к самостоятельной работе с учебной и справочной литературой.
Список ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ И литературы
Электрооборудование промышленности: В 3-х частях. Ч. 2. Промышленный электропривод: Учебное пособие. – Таганрог: Изд-во ТРТУ, 2005. – 288 с. Электроприводы портальных и плавучих кранов. Требования к расчёту и проектированию. РТМ 212.0050 – 84. – Л.: Транспорт, 1985. – 47 с. Учебно-методическое пособие к курсовому проектированию по теории электропривода для студентов специальности 1-53 01 05. – Мн.: БНТУ, 2004. - 88 с. , Электрооборудование подъёмно-транспортных машин. – М.: Транспорт, 1993. – 311 с. Правила устройства и безопасной эксплуатации грузоподъёмных кранов. – М.: Металлургия, 1996. – 124 с. Крановое электрооборудование: Справочник под ред. – М.: Энергоиздат, 1979. – 164с. , Крановый электропривод: Справочник. – М.: Энергоатомиздат, 1988. – 344 с. , Справочник по слаботочным электрическим реле. 3-е изд. перераб. И доп. – Л.: Энергоатомиздат, 1998. – 560 с. , Электрооборудование общепромышленных механизмов. Методические указания к лабораторным работам студентов специальности 140400. – Барнаул, АлтГТУ, 2013. – 58 с. , , Электрооборудование и автоматизация береговых установок / Методические указания к курсовому проектированию для студентов специальности 0628 «Электропривод и автоматизация промышленных установок» дневной и заочной форм обучения. Кафедра ЭОСиБС. – Новосибирск: НИИВТ, 1997. – 57 с. Онлайн Электрик: Интерактивные расчеты систем электроснабжения [Электронный ресурс] / . – Режим доступа: https://online-electric. ru. Дата обращения 15.03.2018.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
