

При работе с пьезоэлектрическими и пироэлектрическими датчиками сопротивление резистора Rb (R на рис. 10 Б) может достигать значений десятков и даже сотен ГОм. На практике резисторы таких номиналов используются крайне редко: во-первых, они достаточно редки; во-вторых, они обладают плохой стабильностью при изменении условий окружающей среды. В таких случаях высокоомный резистор часто заменяют схемой, известной под названием умножителя сопротивлений, реализованной на основе ОУ с положительной ОС (рис. 12 Б). Благодаря высокому коэффициенту усиления ОУ, напряжения на инвертирующем и неинвертирующем входах усилителя практически равны друг другу: V+ » V - . Резисторы R1 и R3 формируют резистивный делитель, напряжение V2 на котором определяется следующим соотношением:
![]() . (15)
. (15)
Зная падение напряжения на резисторе Rb, можно найти ток, протекающий через него:
![]() . (16)
. (16)
Из этого уравнения получим зависимость входного напряжения от входного тока и сопротивлений:
![]() . (17)
. (17)
Из последнего выражения видно, что значение резистора Rb как бы увеличивается в  раз. Это значит, что если Rb = 10 МОм, а коэффициент
раз. Это значит, что если Rb = 10 МОм, а коэффициент  , эта схема является виртуальным сопротивлением 50 МОм. Однако такой умножитель сопротивлений следует применять очень аккуратно, поскольку нельзя забывать, что шумы, ток и напряжение смещения будут усиливаться в такое же
, эта схема является виртуальным сопротивлением 50 МОм. Однако такой умножитель сопротивлений следует применять очень аккуратно, поскольку нельзя забывать, что шумы, ток и напряжение смещения будут усиливаться в такое же ![]() число раз, и это может быть неприемлемым в ряде практических случаев. Этой схеме присуща еще одна отрицательная черта: неустойчивость, обусловленная положительной ОС. Поэтому на практике никогда не используют умножитель сопротивлений с коэффициентом увеличения более 10.
число раз, и это может быть неприемлемым в ряде практических случаев. Этой схеме присуща еще одна отрицательная черта: неустойчивость, обусловленная положительной ОС. Поэтому на практике никогда не используют умножитель сопротивлений с коэффициентом увеличения более 10.
3. Аналого-цифровые преобразователи (АЦП)
АЦП бывают разных типов: из дискретных компонентов, в виде ИС, высокопроизводительных гибридных схем, модулей и даже блоков. Также АЦП изготавливаются в виде стандартных ячеек для применения в специализированных ИС. АЦП - это преобразователи, конвертирующие аналоговые данные, обычно напряжение в эквивалентный цифровой сигнал, совместимый с цифровыми устройствами обработки данных. Основными характеристиками АЦП являются:
- абсолютная и относительная погрешность,
- линейность,
- разрешающая способность,
- скорость преобразования,
- стабильность,
- способность не пропускать коды и
- стоимость.
Довольно часто, особенно когда цена АЦП имеет решающее значение, применяют преобразователи, реализованные из дискретных компонентов и в виде монолитных ИС. Наиболее популярными являются АЦП, построенные на принципе последовательного приближения, которые дают возможность найти хороший компромисс между быстродействием и точностью. Когда не требуется высокая скорость преобразований, часто применяются интегрирующие АЦП и преобразователи напряжения в частоту. В настоящее время методы проектирования АЦП хорошо отработаны. В этом разделе будут даны краткие описания наиболее распространенных архитектур АЦП. Более подробную информацию об АЦП можно найти в специализированной литературе.
4. Прямая дискретизация и обработка сигналов
Выходные сигналы датчиков, как правило, очень малы. Для приведения таких сигналов до уровня, совместимого с устройствами сбора данных, обычно применяются усилители. К сожалению, усилители и подводящие кабели, часто приводят к появлению дополнительных погрешностей, увеличению стоимости и сложности всей системы. Поэтому в настоящее время использование усилителей считается устаревшим способом согласования уровней сигналов (по крайней мере, для некоторых типов датчиков). Во многих современных промышленных интерфейсных системах применяются цифровые устройства передачи и преобразования данных, реализованных на основе методов прямой дискретизации выходных сигналов датчиков, особенно эффективных в случаях интеграции датчика и всей системы на одном кристалле.
Традиционные методы АЦ преобразований основаны на работе с достаточно высокими входными сигналами, что позволяет делать большую величину младшего значащего разряда (МЗР) и минимизировать погрешности, вызванные шумами и сигналами смещения. По этой причине минимальный уровень МЗР обычно выбирается равным не менее 100-200 мкВ, что делает невозможным прямое подключение многих датчиков (например, термопарных и пьезорезистивных струнных датчиков). Выходные сигналы таких датчиков часто не превышают нескольких милливольт, что означает, что МЗР 10-ти разрядного АЦП при этом должен быть порядка 1 мкВ.
При прямой дискретизации выходных сигналов датчиков нет необходимости использовать усилители в интерфейсной схеме, что может привести к улучшению рабочих параметров систем без ухудшения точностных характеристик. Основная идея прямой дискретизации заключается во встраивании датчика в схему преобразователя сигнала (например, АЦП или преобразователя импеданса в частоту). Такие преобразователи по своей природе являются модуляторами и, следовательно, нелинейными устройствами. Как правило, в их состав входит нелинейное устройство, часто пороговый компаратор. Смещение порогового уровня компаратора приводит к модуляции выходного сигнала, что и используется для преобразования сигнала датчика в дискретный вид.
На рис. 4.1 А показана схема простого модуляционного генератора, который состоит из интегратора, реализованного на основе ОУ, и порогового устройства. Напряжение на конденсаторе С равно интегралу тока, пропорционального напряжению на неинвертирующем входе ОУ. Когда это напряжение сравнивается с пороговым уровнем, ключ Sw закрывается, конденсатор полностью разряжается. После чего конденсатор снова начинает интегрировать ток до следующего замыкания ключа и т. д. Рабочая точка ОУ задается резистором R2, фототранзистором S и опорным напряжением V Изменение потока света, падающего на базу транзистора, приводит к изменению его тока коллектора, что смещает рабочую точку. Подобную схему можно использовать для прямой дискретизации выходного сигнала резистивного датчика (например, термистора). Если в схему ввести цепи, компенсирующие напряжение и ток смещения ОУ, а также дрейф температуры и т. д., ее точность преобразований будет значительно улучшена.
|
|
А) схема генератора, модулируемого светом | Б) напряжение на выходе генератора |
Рис. 4.1.
Емкостные датчики являются очень популярными измерительными устройствами. В настоящее время много типов емкостных датчиков изготавливают в интегральном исполнении методами микротехнологий. В состав емкостных датчиков давления входит тонкая кремниевая диафрагма, выполняющая роль подвижной пластины конденсатора с переменным зазором. На обратную сторону этой диафрагмы нанесен металлический электрод. Основной проблемой конденсаторов такого типа является относительно низкое значение емкости на единицу площади (пФ/мм2), что приводит к увеличению размеров датчика. Обычно емкость таких датчиков при нулевом давлении составляет величину порядка нескольких пикофарад, поэтому при 8-ми разрядном разрешении датчик должен детектировать изменения емкости порядка 50 фФ и даже меньше (1 фФ = 10~15Ф). Очевидно, что любые внешние измерительные схемы работать с такими датчиками не могут, поскольку паразитная емкость соединительных проводов, как правило, составляет не менее 1 пФ, что сравнимо с емкостью самого датчика. Единственным выходом из данной ситуации является разработка интегрированного устройства на одном кристалле, составляющими частями которого являются сам датчик и интерфейсная схема. Для построения такого устройства можно применить метод с переключением конденсаторов, основанный на передаче заряда с одного конденсатора на другой при помощи твердотельных аналоговых переключателей.
Современная тенденция построения интерфейсных схем заключается в объединении на одном кремниевом кристалле усилителя, мультиплексора, АЦП, и других схем. Примером такого интегрированного устройства является ИС МАХ 1463 (Maxim Integrated Products), в состав которой входит двухканальный 16-ти разрядный программируемый интерфейс, выполняющий функции усиления, калибровки, линеаризации сигнала и температурной компенсации. Эта ИС обеспечивает воспроизводимость рабочих характеристик датчика без применения внешних регулировочных компонентов. МАХ 1463 может работать с разнообразными датчиками, включая датчики давления, терморезистивные и термопарные чувствительные элементы, тензодатчики, динамометры и резистивные элементы, применяемые в магнитных датчиках направления. У нее есть несколько выходных портов: аналоговых и цифровых. Выходными сигналами могут быть: напряжение, ток (4...20 мА), отношение сигналов и сигналы с широт-но-импульсной модуляцей (ШИМ). В состав МАХ 1463 также входят незадействованные ОУ, предназначенные для выполнения пользовательских функций, например, буферизации выходных сигналов ЦАП, управления большими внешними нагрузками, дополнительного усиления и фильтрации сигналов. ИС МАХ 1463 имеет внутренний 16-ти разрядный процессор с программируемой FLASH-памятью на 4 кбайта, 128 байт оперативной FLASH памяти, 16-ти разрядный АЦП и два 16-ти разрядных ЦАП. В дополнение к этому в нее входят два 12-ти разрядных цифровых порта для ШИМ сигналов, четыре ОУ и один встроенный датчик температуры. Микросхема смонтирована в стандартном SSOP корпусе с 28 выводами, что позволяет ее располагать в непосредственной близости отдатчиков без каких-либо промежуточных кабелей и проводов.
5. Измерители отношений сигналов
Измерение отношений является хорошим способом улучшения точности датчика, поэтому он широко применяется при построении интерфейсных схем. Однако следует отметить, что этот метод работает, только когда источники погрешностей имеют мультипликативную, а не аддитивную природу. Это означает, что этот способ, например, не может помочь снизить тепловой шум, но он очень полезен для уменьшения влияния на чувствительность датчиков таких факторов, как нестабильность источников питания, окружающая температура, влажность, давление, старение и т. д. Метод измерения отношений требует использования в системе двух датчиков, один из которых является активным, т. е. измеряющим внешнее воздействие, другой - компенсационным, который либо экранируется от измеряемых сигналов, либо не реагирует на них. Остальные внешние факторы воздействуют на оба датчика одинаково, поэтому их рабочие характеристики также меняются одинаково. На вход второго датчика, часто называемого эталонным, подается известный сигнал, обладающий долговременной стабильностью и постоянством. Эталонный и активный датчики не обязательно должны иметь одинаковую природу, но требуется, чтобы они одинаково реагировали на дестабилизирующие факторы.
Шумы в датчиках и интерфейсных схемах
Шумы в датчиках и интерфейсных схемах могут быть источниками серьезных погрешностей, что необходимо учитывать при разработке схем. «Шумы подобны болезням: их можно только предотвратить, подавить или смириться с ними, в зависимости от их природы, серьезности, сложности и стоимости лечения, но от них никогда не удается полностью избавиться». По отношению к каждой конкретной схеме можно выделить две основные группы шумов: собственные шумы (к ним относятся все шумы, возникающие внутри схемы) и интерференционные помехи (вносимые шумы), источники которых находятся за пределами схемы.
Ни один датчик, независимо от того, насколько хорошо он был спроектирован, не вырабатывает на выходе сигнал, точно соответствующий внешнему воздействию. Для того чтобы определить, насколько хорошо выходной сигнал датчика воспроизводит входной сигнал, пользуются критерием, основанным на требованиях по точности и надежности. Отклонения сигнала датчика от истинного значения могут быть либо систематическими, либо стохастическими (случайными). Первый тип погрешностей зависит от вида передаточной функции датчика, его линейности, динамических характеристик и т. д. Общим для всех типов систематических отклонений является то, что все они определяются конструкциями датчиков, производственными допусками, качеством материалов и калибровкой. Все перечисленные характеристики в течение заданного интервала времени должны оставаться постоянными или меняться очень медленно. Все они поддаются математическому описанию и могут быть определены экспериментально. В ряде случаев полученное значение систематической погрешности может приводиться в справочных данных и учитываться в дальнейших расчетах. Стохастические погрешности наоборот носят случайный характер, являются в достаточной степени непредсказуемыми и могут меняться очень быстро. Часто именно они называются шумами, что связано с их природой и статистическими свойствами. Под шумом понимаются все помехи, привносимые либо внешними воздействиями и окружающими факторами, либо возникающие в компонентах датчика и схемы в диапазоне от нуля до максимальных рабочих частот.
1. Собственные шумы
Сигнал датчика, преобразуемый в интерфейсной схеме, состоящей из усилителя и АЦП, в цифровой код, нельзя характеризовать только его амплитудой и спектральными параметрами, всегда необходимо оценивать его разрешающую способность.
При увеличении числа разрядов, величина МЗР уменьшается. Например, МЗР 10-ти разрядной системы с 5-ти вольтовой шкалой измерения равен 5 мВ, а 16-ти разрядной системы - уже 77 мкВ. Отсюда видно, что если суммарные помехи превышают уровень, скажем 300 мкВ, нет никакого смысла использовать 16-ти разрядное АЦП. На самом деле, на практике, ситуация еще хуже. Поскольку большинство датчиков не могут вырабатывать сигналы, соответствующие 5-ти вольтовой шкале, на их выходах необходимо устанавливать усилители. Например, если максимальный выходной сигнал датчика равен 5 мВ, МЗР 16-ти разрядного преобразователя составляет 77 нВ. Такой маленький сигнал усиливать очень трудно. В случаях, когда требуется высокая разрешающая способность преобразований, необходимо учитывать все источники шума. В таких системах помехи могут вырабатываться ОУ и другими компонентами, используемыми в цепях ОС, смещения и т. д.
Входные токи и напряжения смещения могут дрейфовать. В цепях постоянного тока этот дрейф трудно отличить от низкоуровневых сигналов датчика. Сигналы смещения обычно меняются очень медленно (в пределах частотной полосы десятков и сотен герц), поэтому их дрейф часто называется сверхнизкочастотным шумом. Этот шум эквивалентен случайным (или прогнозируемым, связанным, например, с температурой) изменениям напряжения и тока смещения.
Причины возникновения этих помех объясняются физической природой резисторов и полупроводниковых элементов, используемых для построения схем. Одна из причин возникновения шума лежит в дискретной природе электрического тока, поскольку ток - это движение заряженных частиц, каждая из которых переносит определенное количество заряда (например, заряд электрона равен 1.6*10-19 Кл). На атомном уровне поток заряженных частиц выглядит очень хаотичным, а движения носителей зарядов напоминают лопающиеся зерна кукурузы при приготовлении попкорна. Ассоциация с попкорном действительно очень хороша, поэтому этот шум иногда называют «попкорновым». Движение электронов может быть описано только при помощи статистических терминов. Оно зависит от температуры, и мощность шума, в свою очередь, также определяется температурой. В резисторах это тепловое движение электронов приводит к появлению теплового шума или шума Джонсона. Среднеквадратичное значение напряжения шума, пропорционального мощности шума, можно определить из выражения:
![]() . (1)
. (1)
где к - 1.38*1023Дж/К - постоянная Больцмана, Т - температура в Кельвинах, R - сопротивление в Омах, а Δf - ширина полосы, в пределах которой проводились измерения, в Гц. В некоторых случаях плотность шума в резисторе при комнатной температуре оценивается по следующей упрощенной формуле:
![]() . (2)
. (2)
Например, если частотная полоса шума составляет 100 Гц, а сопротивление -10 МОм, среднее напряжение шума приблизительно равно 4мкВ.
Даже самый обыкновенный резистор является источником шума и ведет себя как постоянно работающий генератор электрических сигналов. Чем меньше величина сопротивления резисторов, тем больший тепловой шум они производят. И если при маленьких номиналах этим шумом можно и пренебречь, то при больших - его всегда необходимо учитывать. Например, в пироэлектрическом детекторе используется резистор смещения с номиналом порядка 50 ГОм. Если датчик работает при комнатной температуре в полосе частот шириной 100 Гц, можно ожидать, что среднее напряжение шума на этом резисторе будет очень большим - порядка 0,3 мВ. Для того чтобы шум не превышал допустимых пределов, полоса частот интерфейсной схемы должна быть, как можно, более узкой. Следует отметить, что напряжение шума пропорционально квадратному корню от ширины полосы частот. Это означает, что при уменьшении полосы частот в 100 раз, напряжение шума снизится только в десять раз. Величина шума Джонсона является практически постоянной в широкой полосе частот, поэтому его часто называют белым шумом, поскольку он напоминает белый свет, состоящий из всех частот видимого спектра.
Возникновение другого типа шумов объясняется протеканием постоянного тока в полупроводниках. Этот шум получил название дробового шума, поскольку его звук напоминает «удары потока пуль о мишень». Это название предложил Шотки, поэтому существует и другое название - шум Шотки. Дробовой шум также является белым шумом. Чем выше ток смещения, тем больше величина этого шума. По этой причине полевые и КМОП полупроводниковые устройства обладают низким уровнем такого шума. Для тока смещения 50 пА, он равен около ![]() , что является очень маленькой величиной, эквивалентной движению порядка 6000 электронов в секунду. Дробовой шум можно оценить при помощи выражения:
, что является очень маленькой величиной, эквивалентной движению порядка 6000 электронов в секунду. Дробовой шум можно оценить при помощи выражения:
![]() , (3)
, (3)
где I - ток через полупроводниковый переход в пА, а Δf- полоса частот в Гц.
На низких частотах к этим шумам добавляются шумы, связанные с протеканием переменного тока. В обоих источниках шума: и тока, и напряжения, спектральная плотность шума обратно пропорциональна частоте. Поскольку наибольший шум соответствует самой низкой частоте, а самые низкие частоты видимого диапазона излучений находятся в красной области спектра, такой шум часто называют розовым шумом. Этот вид шума характерен для всех проводящих материалов, и, следовательно, он также возникает и в резисторах. На самых низких частотах практически невозможно отделить розовый шум от белого шума. Этот шум также называют фликер-шумом или шумом мерцаний. Розовый шум особенно ощутим на частотах ниже 100 Гц, где работает большинство датчиков, поэтому в этом частотном диапазоне он может стать основным источником погрешностей, преобладая над шумами Джонсона и Шотки. Величина розового шума зависит от тока, протекающего через резистивный или полупроводниковый материал. В настоящее время прогресс в технологии производства полупроводниковых материалов позволил значительно снизить уровень фликер-шума, однако в случаях, когда требуется получить на низких частотах низкий уровень шума, в датчиках или входных цепях интерфейсных схем рекомендуется использовать пленочные или проволочные резисторы, особенно при протекании через них больших токов.
При наблюдении на экране осциллографа за выходным сигналом ОУ, являющимся основным устройством при построении интерфейсных схем, можно увидеть специфический шум, похожий на цифровой сигнал, переданный из космоса. Этот шум имеет форму прямоугольных импульсов переменной длительности порядка нескольких миллисекунд. Из-за характерного звука в громкоговорителе этот шум также получил название попкорнового шума. Этот шум объясняется дефектами, допущенными при производстве ИС. Но благодаря усовершенствованию технологий в современных полупроводниковых устройствах величина попкорнового шума значительно снижена.
Результирующий шум от всех источников тока и напряжений в схеме определяется суммой квадратов индивидуальный значений напряжений шума, т. е.
![]() (4)
(4)
Величина случайной погрешности равна среднеквадратичному значению шума:
![]() , (5)
, (5)
где t0 - время наблюдения, е - напряжение шума, t - текущее время.
Шум также может быть описан в терминах пиковых значений, наблюдаемых в течение произвольного интервала времени. Положительные пиковые значения могут отличаться от отрицательных. В некоторых датчиках (например, пороговых детекторах) величина полного размаха шума влияет на рабочие характеристики самих устройств, поэтому в таких случаях определение этого значения бывает необходимым. Но на практике из-за распределения шума по закону Гаусса измерить размах шума бывает очень сложно. Поскольку среднеквадратичные значения шума получить гораздо проще, это представление получило большее распространение. Как правило, величина размаха шума превышает его среднеквадратичное значение от 2 до 8 раз, часто это определяется терпением наблюдателя и, соответственно, количеством имеющихся данных.
2. Вносимый шум
Стабильность работы датчика и интерфейсной схемы зависит от их защищенности от шумов внешних источников. На рис. 1 показана схема распространения вносимых шумов. Источники вносимых шумов часто поддаются идентификации. Примерами таких шумов являются всплески напряжения на линиях питания, молнии, изменения окружающей температуры, солнечная активность и т. д. Такие помехи при попадании в датчики и интерфейсные схемы сказываются на их выходных сигналах. При этом они влияют либо на чувствительные элементы датчиков, либо на их выводы, либо на электронные компоненты в схеме. Очевидно, что для интерференционных сигналов датчик и интерфейсная схема играют роль принимающих устройств.
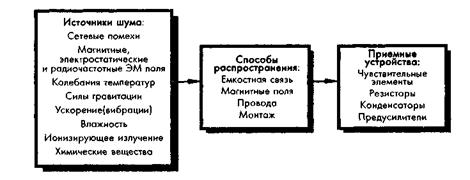
Рис. 1. Источники вносимых шумов и способы их распространения
Вносимые шумы можно классифицировать по нескольким критериям: по способу попадания в датчик или интерфейс, по типу влияния на выходной сигнал и т. д. По тому как вносимые шумы влияют на выходные сигналы, их можно разделить на аддитивные и мультипликативные.
Аддитивный шум en складывается с полезным сигналом Vs, формируя выходной сигнал Vout:
![]() . (1)
. (1)
На рис. 2 Б показано влияние аддитивного шума на выходной сигнал. Из рисунка видно, что величина шума не меняется при изменении полезного сигнала. В линейных датчиках и интерфейсных схемах величина аддитивного шума абсолютно не зависит от величины сигнала, и если сигнал равен нулю, на выходе будет только шум.
|
|
|
А) | Б) | В) |
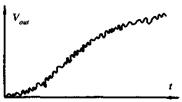
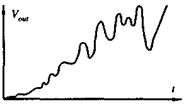
Рис. 5.46. Разновидности помех:
А - полезный сигнал, Б - аддитивный шум, В - мультипликативный шум
Мультипликативный шум меняет передаточную функцию датчика или нелинейных компонентов таким образом, что полезный сигнал становится модулированным этим шумом:
![]() , (2)
, (2)
где N(t) является функцией шума. Пример влияния такого шума на полезный сигнал показан на рис. 2В. Когда полезный сигнал равен нулю, мультипликативная помеха на выходе устройства становится равной нулю. Мультипликативный шум растет одновременно с увеличением сигнала Vs. Как видно из названия, этот вид шума появляется в результате нелинейной операции умножения двух сигналов, одним из которых является полезный сигнал, а другим сигнал, определяемый шумом.
Для повышения помехозащищенности от вносимых аддитивных шумов датчики часто объединяются парами таким образом, что их выходные сигналы вычитаются один из другого (рис. 3). Такой способ называется дифференциальным методом построения датчиков. Один из датчиков, называемый основным, подвергается воздействию измеряемого сигнала, в то время как другой, эталонный датчик, защищается от его влияния.
Поскольку аддитивный шум характерен для линейных и квазилинейных датчиков и интерфейсных схем, на эталонный датчик не надо подавать никаких внешних сигналов, его входной сигнал чаще всего равен нулю. Предполагается, что на оба датчика действуют одинаковые вносимые помехи (собственные шумы датчика не могут быть устранены дифференциальным методом), называемые синфазными помехами. Это значит, что шумы, действующие на датчики, имеют одинаковую фазу и амплитуду, поэтому при вычитании сигналов они будут взаимно уничтожены. Такая комбинация датчиков называется двойным или дифференциальным датчиком. Насколько хорошо подавляются аддитивные шумы можно судить по величине коэффициента ослабления синфазного сигнала (КОСС):
![]() , (3)
, (3)
где S1, и S0 - выходные сигналы основного и эталонного датчиков. КОСС зависит от величины внешних воздействий, и обычно чем выше входные сигналы, тем меньше его значение. Этот коэффициент показывает во сколько раз уменьшается синфазный шум по отношению к полезному сигналу на выходе датчика. Величина КОСС является мерой симметричности датчика.
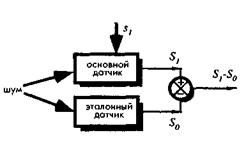
Рис 3. дифференциальный метод снижения аддитивных помех
Для эффективно го подавления шума оба датчика следует располагать, как можно, ближе друг к другу, они должны быть абсолютно идентичными и работать в одинаковых условиях. Также очень важно обеспечить надежное экранирование эталонных датчиков от внешних воздействий, в противном случае эффективность дифференциального метода будет значительно снижена.
Для уменьшения вносимого мультипликативного шума применяется метод измерения отношений. Его принцип достаточно прост. Используется дифференциальный датчик, обе части которого работают в одинаковых условиях окружающей среды и подвергаются воздействию идентичных мультипликативных шумов. При этом на одну половину датчика действует исследуемый внешний сигнал s1, а на вторую половину - эталонную - постоянный стабилизированный сигнал s0. Считаем, что окружающая температура является мультипликативной помехой, одинаково влияющей на оба датчика. Аппроксимируем выходное напряжение первого датчика в узком температурном диапазоне следующим выражением:
![]() , (3)
, (3)
где a - температурная чувствительность передаточной функции датчика, Т - текущая температура,
Т0 - температура при калибровке. Тогда напряжение на выходе эталонного датчика будет равно:
![]() , (4)
, (4)
Найдем отношение двух напряжений:
![]() (5)
(5)
Поскольку f(s0) является постоянной, из последнего выражения видно, что это отношение от температуры (т. е. от мультипликативной помехи) не зависит. Однако следует уточнить, что способ измерения отношений работает только в случае мультипликативных помех, в то время как дифференциальный метод применим исключительно для подавления аддитивных шумов. Но оба метода абсолютно бесполезны для борьбы с собственными шумами, генерируемыми внутри датчиков и интерфейсных схем.
Собственные шумы, как правило, подчиняются закону Гаусса, чего нельзя сказать о вносимых помехах, которые часто трудно описать статистическими методами. Вносимые шумы могут быть периодическими, нерегулярно повторяющимися и просто случайными. Обычно их удается существенно снизить, применяя меры борьбы с электростатическими и электромагнитными наводками от источников питания, радиостанций, механических ключей, а также с всплесками напряжения и тока, возникающими из-за процессов переключений в реактивных цепях. К таким мерам относятся: фильтрация, развязка электрических цепей, экранирование проводников и компонентов, применение ограждающих потенциалов, исключение паразитных контуров заземления, физическая переориентация проводников и компонентов, установка гасящих диодов параллельно катушкам реле и моторов, выбор, как можно, более низких импедансов и использование малошумящих источников питания и опорного напряжения. В таблице 1 приведены некоторые источники вносимых помех, их типичные значения и способы борьбы с ними.
Таблица 1. Некоторые источники вносимого шума
Внешние источники | Типичные значения | Способы борьбы |
Источники питания с частотой 60/50 Гц | 100 пА | Экранирование, исключение паразитных контуров заземления, изолирование источников питания |
Импульсные источники питания с частотой 1 20/100 Гц | 3 мкВ | Фильтрация |
Всплески напряжения на частоте 180/150 Гц от трансформаторов, работающих на частоте 60/50 Гц | 0.5 мкВ | Переориентация компонентов |
Радиостанции | 1 мВ | Экранирование |
Искрение при переключении | 1 мВ | Фильтрация частоты 5-100 МГц, исключение паразитных контуров заземления и экранирование |
Вибрации | 10пА (10-100 Гц) | Внимание к механическим соединениям, удаление проводов с большим напряжением от входных портов и датчиков |
Вибрации кабеля | 100 пА | Использование малошумящих кобелей |
Платы (токи утечки) | 0.01-10 пА ниже 1 0 Гц | Тщательная очистка платы, использование тефлоновых изоляторов |
Чаще всего электрические помехи попадают в схему через паразитные емкости, существующие практически везде. Например, человек, стоящий на диэлектрическом покрытии, и земля формируют емкость, равную около 700 пФ, а емкости между выводами разъема и между эмиттером и детектором оптрона составляют приблизительно 2 пФ.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
