

На рис. .4А показана емкостная связь между источником электрического шума и внутренним импедансом Z датчика через переходной конденсатор С5. Импеданс датчика может быть чисто резистивным или комбинированным, состоящим из резисторов, конденсаторов, катушек и нелинейных элементов, например, диодов. Напряжение на импедансе Z зависит от частоты шума, величины паразитной емкости Cs и импеданса Z. Например, внутренний импеданс пироэлектрического детектора можно представить в виде параллельного соединения конденсатора 30 пФ и резистора 50 ГОм. Если такой датчик через конденсатор 1 пФ присоединить к двигающемуся человеку, тело которого обладает поверхностным электростатическим зарядом, может возникнуть статическое напряжение величиной до 1000 В. Если предположить, что частота движений человека составляет 1 Гц, наводка на датчике при этом будет равна 30 В, что в 3...5 раз выше величины полезного сигнала датчика, вырабатываемого в ответ на тепловое излучение от тела человека. Поскольку некоторые датчики и почти все электронные схемы имеют в своем составе нелинейные компоненты, высокочастотные наведенные сигналы, часто называемые электромагнитной интерференцией (ЭМИ), могут оказаться выпрямленными и появиться на выходе в виде постоянного или медленно меняющегося напряжения.
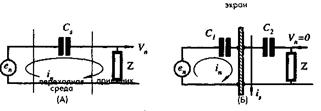
Рис. 4 Емкостная связь (А) и электрическое экранирование (Б)
1. Детекторы присутствия и движения объектов
11 сентября 2001 года перевернуло мышление людей: они стали больше задумываться о защите аэропортов, полетов и о безопасности в целом. Угроза подобных акций заставила разрабатывать более совершенные охранные системы для надежной защиты заданных периметров, для чего необходимы соответствующие сенсорные устройства. Датчики присутствия детектируют нахождение людей (а иногда и животных) в контролируемой зоне, тогда как детекторы движения реагируют только на перемещение объектов. Основным их отличием является то, что датчики присутствия вырабатывают выходной сигнал независимо от того движется объект или замер, в то время как сигнал на выходе детектора движения появляется только в случае перемещения объекта. Такие датчики применяются в системах наблюдения и охраны, в устройствах управления энергией (например, для управления включением/выключением электрического света), в интерактивных игрушках и т. д. В зависимости от конкретной ситуации присутствие человека может определяться по некоторым параметрам его тела или характеристикам поведения. Например, датчик может реагировать на вес человека, тепло от его тела, звуки, на изменение диэлектрической проницаемости и т. д. Для определения присутствия людей и их передвижений в настоящее время применяются следующие типы датчиков:
- Датчики давления воздуха, детекторы перепадов давления воздуха, возникающих при открывании дверей и окон.
- Емкостные датчики: детекторы изменения емкости человеческого тела.
- Акустические датчики: детекторы звуков, производимых людьми.
- Фотоэлектрические датчики: детекторы пересечения луча света движущимися объектами.
- Оптоэлектронные датчики: детекторы уровня освещенности или оптической контрастности в охраняемой зоне.
- Сенсоры предохранительных ковриков: длинные полоски, располагающиеся на полу под ковриком у входной двери, реагирующие на давление, создаваемое весом непрошеного гостя.
- Детекторы напряжений: датчики деформации, встроенные в пол, ступени и другие конструктивные элементы.
- Детекторы открывания: электрические контакты, встроенные в двери и окна.
- Магнитные детекторы открывания: бесконтактная версия детекторов открывания
- Детекторы вибраций: устройства, реагирующие на вибрации стен или других конструкций зданий; такие элементы могут также крепиться к дверям и окнам для обнаружения передвижений объектов.
- Детекторы разбитых стекол: датчики, реагирующие на специфические вибрации, характерные для бьющегося стекла.
- ИК детекторы движения: устройства, реагирующие на тепловые волны, испускаемые теплыми или холодными движущимися объектами.
- СВЧ детекторы(микроволновые датчики): активные устройства, реагирующие на СВЧ электромагнитные волны, отраженные от объектов.
- Ультразвуковые датчики: устройства аналогичные СВЧ датчикам, только в них вместо электромагнитных волн используются ультразвуковые колебания.
- Видеодетекторы появления новых объектов: видео устройства, сравнивающие текущее изображение охраняемой зоны с записанным в памяти эталонным изображением.
- Системы видеораспознавания: анализаторы изображений, сравнивающие характерные особенности лиц людей с портретами, хранящимися в базе данных.
- Лазерные детекторы: устройства, подобные фотоэлектрическим детекторам. Их отличие в том, что они используют узкие лучи света и комбинацию отражателей.
- Электростатические детекторы: датчики, способные детектировать статические электрические заряды, переносимые движущимися объектами
Одним из недостатков детекторов обнаружения присутствия людей или их вторжения в охраняемое пространство является ложное срабатывание. Под ложным срабатыванием понимается ситуация, когда система указывает на присутствие объектов, которых на самом деле там нет. В некоторых случаях, например, в игрушках или устройствах управления освещением, ложное срабатывание не причиняет особых проблем. Однако в охранных и военных системах одинаково опасными являются ситуации как ложного срабатывания, так и пропускания вторжения посторонних в контролируемую зону. Поэтому при выборе датчиков для таких применений необходимо обращать внимание на их надежность, избирательность и помехозащищенность. Для повышения надежности охранных систем часто используют несколько датчиков со своими интерфейсными схемами, работающими независимо друг от друга. Такой прием особенно эффективен в случае воздействия внешних помех. Другим способом снижения ошибок при обнаружении вторжения людей является применение нескольких датчиков, основанных на разных физических принципах (например, очень эффективна комбинация емкостных и ИК детекторов, поскольку для них критичными являются разные виды вносимых помех).
1.1. Ультразвуковые датчики присутствия
Такие детекторы посылают акустические волны на объект и принимают отраженные от него волны. Более подробное описание ультразвуковых детекторов будет дано далее. Для использования таких детекторов в качестве датчиков движения желательно увеличить их рабочий диапазон и угол охвата территории.
1.2. Микроволновые детекторы движения
СВЧ детекторы являются прекрасной альтернативой другим датчикам, когда требуется контролировать большие площади и работать в широком температурном диапазоне в сильно зашумленных условиях: при ветре, акустических помехах, в тумане, пыли, влажности и т. д. Принцип действия СВЧ детекторов основан на излучении электромагнитных радиочастотных волн в сторону охраняемой зоны. Самыми распространенными частотами являются 10.525 ГГц (Х-диапазон) и 24.125 (К-диапазон). Мощность излучения должна быть довольно низкой, чтобы не причинять вред здоровью людей, длина излучаемых волн достаточно большая (λ = 3 см для Х-диапазона), чтобы свободно проходить сквозь большинство частиц, загрязняющих воздух, и достаточно короткой, чтобы отражаться от больших объектов.
Микроволновая часть детекторов состоит из генератора Ганна, антенны и смесительного диода. Генератор Ганна представляет собой диод, смонтированный в маленькой прецизионной полости, который при подаче напряжения питания начинает вырабатывать СВЧ колебания. Часть этих электромагнитных волн, имеющих частоту f0, проходит через диафрагму в волновод и попадает в антенну, которая направляет их в сторону объекта. В зависимости от применения выбираются разные фокусирующие характеристики антенны. Основное правило такое: чем уже диаграмма направленности антенны, тем большей чувствительностью она обладает (т. е. тем выше ее коэффициент усиления). Другое важное свойство следующее: антенны с узкой (игольчатой) диаграммой направленности имеют большие размеры по сравнению с широкоугольными антеннами, которые могут быть довольно миниатюрными. Типовая мощность излучения передатчика составляет 10...20 мВт. Стабильность генераторов Ганна зависит от приложенного напряжения, поэтому очень важно для питания генераторов использовать высококачественные регуляторы напряжения. Генератор может работать либо непрерывно, либо периодически. При работе в импульсном режиме резко снижается потребляемая от источника питания мощность.
Меньшая часть излучаемых волн попадает на смесительный диод Шотки и используется в качестве эталонного сигнала (рис. 1.1А). Часто приемник и передатчик сигналов расположены в одном модуле, называемом приемопередатчиком или трансивером. Часть отраженных от объекта волн возвращается назад на антенну, которая перенаправляет их на смесительный диод. Ток на диоде представляет собой гармонический сигнал, частота которого определяется разностью фаз излучаемой и отраженной волн, которая прямо пропорциональна расстоянию до объекта. При помощи такого фазочувствительного детектора можно найти расстояние до объекта, однако, как правило, требуется определять не расстояние, а факт передвижения объекта в охраняемой зоне. Детекторы присутствия и движения часто реализуются на основе эффекта Доплера. На этом принципе работают практически все СВЧ и ультразвуковые детекторы. Следует отметить, что Доплеровские датчики являются детекторами движения, а не присутствия, поскольку реагируют только на движущиеся объекты. Далее поясним, как они работают.
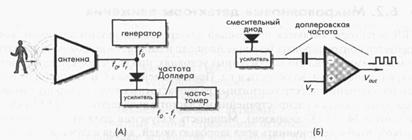
Рис. 6.1. СВЧ детектор присутствия: А - схема для измерения доплеровской частоты,
Б - схема с пороговым детектором
Антенна излучает на частоте f0, которая определяется длиной волны λ0:
![]() (1.1)
(1.1)
где с0 - скорость света. Когда объект движется по направлению к антенне или от нее, частота отраженного излучения меняется. При движении объекта от антенны со скоростью v, частота отраженного сигнала уменьшается, а при приближении объекта - возрастает. Это явление и называется эффектом Доплера, названным в честь австрийского ученного Кристиана Доплера (1803-18лет назад не существовало акустических приборов для проведения прецизионных измерений. Для доказательства своей теории Доплер посадил трубачей на железнодорожную платформу, а рядом с путями разместил музыкантов с абсолютным слухом. Локомотив таскал эту платформу мимо музыкантов с разной скоростью два дня. Музыканты фиксировали ноты, играемые трубачами, при приближении и удалении платформы. После анализа полученных данных, оказалось, что уравнения Доплера верны.) Несмотря на то, что эффект Доплера был первоначально открыт для звука, он справедлив и для электромагнитных волн. Однако в отличие от звуковых волн, скорость которых зависит от движения источника звука, электромагнитные волны распространяются со скоростью света, являющейся абсолютной константой. Согласно теории относительности частота отраженных электромагнитных волн определяется следующим выражением:
 (1.2)
(1.2)
На практике величиной (v/c0)2 можно пренебречь, поскольку она очень мала по сравнению с единицей. Тогда выражение для частоты отраженных волн становится аналогичным уравнению для акустических волн:
 (1.3)
(1.3)
Из-за эффекта Доплера отраженные и падающие волны имеют разную частоту. Смесительный диод складывает излучаемые (эталонные) и отраженные волны. Поскольку он является нелинейным устройством, его выходной сигнал состоит из множества гармоник частот обоих входных сигналов. Электрический ток, протекающий через диод, может быть представлен в виде полинома:
![]() (1.4)
(1.4)
где i0 - постоянная составляющая, ак - коэффициенты гармоник, определяемые рабочей точкой диода, U1, и U2 - амплитуды излучаемого и отраженного сигналов a t - время. Этот ток содержит бесконечное число гармоник, среди которых есть гармоника с частотой, равной разности частот Df, называемой частотой Доплера:
![]()
Частоту Доплера на смесительном диоде можно найти из уравнения (1.3):
![]() (1.5)
(1.5)
Поскольку c0/n >> 1, после подстановки выражения (1.1) получим следующее уравнение:
![]() (1.6)
(1.6)
Следовательно, частота сигнала на выходе смесительного диода линейно пропорциональна скорости движения объекта. Например, человек приближается к детектору со скоростью 0.6 м/с, частота Доплера при работе датчика в Х-диапазоне составит Df =0.6/0.03=20 Гц.
Уравнение (1.6) справедливо только для случаев движения объекта прямо навстречу излучению детектора. Когда объект приближается к детектору под некоторым углом q, частоту Доплера можно найти из следующего выражения:
![]() (1.7)
(1.7)
Из этого уравнения видно, что доплеровские детекторы становятся неэффективными при приближении объектов под углами q, близкими к 90°. В датчиках скорости для определения скорости движения объекта требуется измерять частоту Доплера и фазу для нахождения направления перемещения (рис. 1.1А). Этот метод применяется в радарах автоинспекторов. В охранных системах и в устройствах открывания дверей в супермаркетах также используются доплеровские детекторы, но в них вместо измерения частоты при обнаружении движущихся объектов срабатывает пороговый компаратор (рис. 1.1Б). Отметим, что хотя из выражения (1.7) и следует равенство нулю частоты Доплера для объектов, движущихся под углом в = 90°, на практике попадание объектов в охраняемую зону под любыми углами приводит к резким скачкам амплитуды принимаемого сигнала и, соответственно, к изменению выходного напряжения смесительного диода. Обычно этих перепадов сигналов достаточно для запуска порогового детектора.
Напряжение на смесительном диоде обычно находится в диапазоне от микровольт до милливольт, поэтому, как правило, следом за ним ставят усилитель. Поскольку частота Доплера лежит в звуковом диапазоне, используемый усилитель может быть достаточно простым; однако при этом необходимо применять узкополосный режекторный фильтр для подавления сетевых наводок и основных гармоник двухполупериодных выпрямителей, а также ламп дневного освещения: 60 и 120 Гц (или 50 и 100 Гц). Для обеспечения нормальной работы необходимо, чтобы мощность принимаемого сигнала была достаточно высокой. Выполнение этого условия зависит от нескольких факторов - от площади апертуры антенны А, площади объекта а, а также от расстояния до объекта r.
![]() (1.8)
(1.8)
где Р0 - мощность исходного излучения. Для эффективной работы площадь поперечного сечения объекта а должна быть достаточно большой, поскольку при λ2<a, амплитуда принимаемого сигнала резко снижается. Отражающая способность объекта r при воздействии на него излучений определенной длины волны также сильно влияет на величину принимаемого сигнала. Обычно токопроводящие материалы и объекты с высокой диэлектрической проницаемостью хорошо отражают электромагнитные волны, тогда как многие диэлектрики поглощают энергию, и вследствие этого обладают плохой отражающей способностью. Пластмассы и керамические материалы имеют хорошую пропускающую способность и поэтому могут использоваться в качестве окон в СВЧ детекторах. Самыми хорошими объектами для микроволновых датчиков являются проводящие пластины с ровной, гладкой поверхностью, перпендикулярно расположенные к направлению излучения детектора. Ровная проводящая поверхность обладает очень высокой отражающей способностью, но при этом отклонение пластины даже на небольшой угол q, сильно сказывается на работе датчика. Так при угле в = 45°, отраженный сигнал может и вовсе не дойти до приемной антенны. Такой способ отклонения электромагнитных волн применен в бомбардировщике Стелc, невидимом на экранах наземных радаров.
Для определения направления движения объекта (навстречу детектору или от него) датчик должен быть оснащен еще одним смесительным диодом. Второй диод располагается в волноводе таким образом, что доплеровские сигналы от двух диодов отличаются по фазе на 1/4 длины волны или на 90° (рис. 1.2А). Выходные сигналы обоих диодов усиливаются отдельно друг от друга и преобразуются в прямоугольные импульсы, которые далее анализируются в логическом устройстве, представляющем собой цифровой дискриминатор фаз, определяющий направление движения объекта (рис.1.2Б). Такие детекторы в основном применяются в устройствах автоматического открывания дверей и управления транспортными потоками. В обоих случаях для выработки управляющего сигнала необходимо предварительно собрать определенную информацию об объекте. В устройствах открывания дверей ограничение области наблюдения и мощности излучения может привести к существенному снижению ложных срабатываний. Если в этих устройствах функция определения направления движения объектов является необязательной, то в системах управления транспортными потоками она необходима для исключения сигналов от удаляющихся автомашин. Если такой доплеровский детектор используется в устройствах охранной сигнализации, вибрации строительных конструкций могут вызвать большое количество ложных срабатываний. Логическое устройство должно исключать переменные сигналы, соответствующие вибрациям, и реагировать только на сигналы от движущихся объектов, таким образом, повышая надежность работы охранной системы.
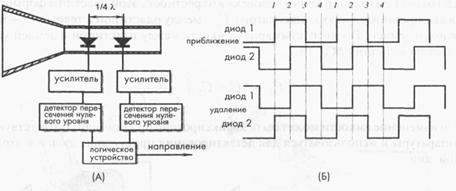
Рис. 1.2. Блок-схема (А) и временные диаграммы (Б) микроволнового доплеровского датчика
движения с функцией определения направления перемещения
Если микроволновый детектор используется в США, он должен отвечать всем строгим требованиям (например, MSM20100), предъявляемым Федеральным Комитетом Информации. Подобные требования существуют во многих странах. Например, согласно OSHA 1910.97, в частотном диапазоне 100 МГц...100 ГГц излучение датчика не должно превышать 10 мВт/см2 при работе со средним периодом опроса 0.1... 1 час.
На основе микромощного импульсного радара можно реализовать достаточно эффективный детектор движения. Достоинствами таких детекторов являются низкое потребление мощности и почти полная незаметность для злоумышленников. Такой радар может быть спрятан внутри строительных конструкций и, благодаря своей низкой излучающей мощности, не превышающей мощность естественного теплового шума, его трудно обнаружить при помощи электронных устройств.
1.3. Емкостные датчики присутствия
Поскольку человеческое тело представляет собой среду с высокой диэлектрической проницаемостью (на частоте 40 МГц диэлектрическая константа мышц, кожи и крови приблизительно равна 97, а жира и костей - 15), между ним и окружающими предметами возникают различные емкостные связи. Величины появляющихся переходных емкостей определяются такими факторами, как размер тела, материал одежды, тип окружающих объектов, погода и т. д. Обычно он лежит в диапазоне от нескольких пикофарад до нескольких нанофарад. При движении человека величины этих емкостей меняются, что дает возможность отделить движущиеся объекты от статических. На самом деле все объекты связаны друг с другом некоторыми емкостными связями. И если эти связи в какой-либо зоне зафиксировать, появление любого нового объекта в окрестности этой зоны приведет к нарушению установившихся связей. На рис. 1.3 показано, что первоначально емкость между тестовой пластиной и землей (здесь, под словом «земля» подразумевается любой большой объект, такой как земля, озеро, автомобиль, корабль, самолет и т. д.) равна С,. При вторжении человека в окрестность этой пластины формируются два дополнительных конденсатора: Са - между пластиной и телом и Сb - между телом и землей. Поэтому суммарная емкость между пластиной и землей увеличится на величину DС:
![]() (1.9)
(1.9)
Это изменение емкости может быть зафиксировано при помощи соответствующей аппаратуры и использоваться для детектирования присутствия людей в охраняемой зоне.
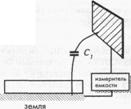
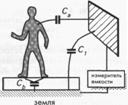
Рис. 1.3. Человек вносит дополнительную емкость в схему детектора
На рис. 1.4 показана емкостная охранная система для автомобиля. Чувствительный элемент вмонтирован в сидение автомобиля. Он может быть изготовлен в виде металлической пластины или сетки, электропроводной ткани и т. д. Чувствительный элемент формирует одну из пластин конденсатора С. Второй пластиной этого конденсатора может быть либо корпус автомобиля, либо отдельная пластина, расположенная под ковриком на полу. В качестве эталонного конденсатора Сх используется либо постоянный, либо переменный конденсатор. Его необходимо размещать недалеко от сидения. Эталонный и чувствительный конденсаторы подключаются к соответствующим входам детектора зарядов (через резисторы R1 и R2). Для уменьшения паразитных наводок соединительные провода следует скручивать. Дифференциальный детектор зарядов управляется генератором прямоугольных импульсов (рис. 1.5). Когда на сидении никто не сидит, эталонный конденсатор устанавливается приблизительно равным конденсатору Сp. Резисторы и соответствующие конденсаторы определяют постоянные времени двух цепей. В исходном состоянии обе RC цепи имеют одинаковые постоянные времени, равные t1,. Напряжения с резисторов подаются на входы ОУ, выходной сигнал которого Vc практически равен нулю. Небольшие пики на выходном сигнале свидетельствуют о некотором разбалансе схемы. Когда человек садится на сидение, его тело формирует дополнительную емкость параллельно Сp, что приводит к увеличению постоянной времени цепи от t1, до t2. Это сказывается на увеличении амплитуды пиков на выходе ОУ. Компаратор сравнивает Vc с эталонным уровнем напряжения Vref. Когда Vc становится больше Vref компаратор посылает сигнал на логическое устройство, вырабатывающее сигнал тревоги V, свидетельствующий о том, что в машине кто-то находится. Следует отметить, что емкостной детектор является активным устройством, поскольку для его работы необходим сигнал генератора.
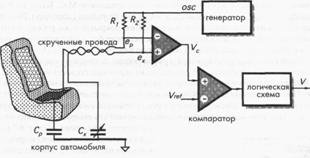
Рис. 1.4. Емкостной детектор для охраны автомобиля охранного детектора
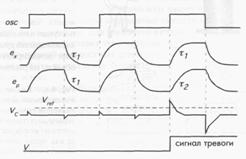
Рис. 1.5. Временные диаграммы работы емкостного датчика
Когда емкостной датчик присутствия используется радом или на металлических устройствах, его чувствительность может быть несколько снижена из-за паразитных емкостных связей между электродом и металлическими частями. Эффективный способ борьбы с паразитными емкостями - применение экранов. На рис. 1.6А показан робот с металлической рукой. Рука движется радом с людьми и другими потенциально проводящими объектами и может с ними столкнуться, если управляющий компьютер робота не получит информацию о близости руки с препятствием. При приближении любого объекта к руке робота формируется емкостная связь между ним и рукой, равная Сso. Рука робота покрыта электрически изолированной проводящей оболочкой, называемой электродом. На рис. 1.3 показано, как можно при помощи детектирования емкостной связи определять присутствие людей в окрестности датчика. Однако массивная металлическая рука робота (рис. 1.6Б) имеет гораздо более сильную емкостную связь с электродом, чем образуемая связь между электродом и объектом. Элегантное решение этой проблемы - размещение между электродом и рукой робота промежуточного экрана (рис. 1.6В) (Этот принцип был предложен из Palnning Research Corp. при создании робота для NASA's Jet Propulsion Laboratory). Роль датчика приближения здесь выполняет многослойное покрытие руки робота, в котором нижний слой является диэлектриком, после него идет большой токопроводящий экран, а верхний слой представляет собой узкую пластину электрода. Для уменьшения емкостной связи между электродом и рукой робота, потенциал экрана должен быть равен потенциалу электрода, следовательно, на экран надо подавать напряжение, равное напряжению электрода (поэтому такой экран часто называется управляемым экраном). При выполнении этого условия между экраном и электродом не будет никакого электрического поля, а между экраном и рукой робота возникнет сильное электрическое поле. При этом между электродом и объектом также формируется достаточно сильное электрическое поле. На рис. 1.7 показана упрощенная схема генератора прямоугольных импульсов, частота которых зависит от значений входной емкости, состоящей из следующих емкостей: Сsg (между датчиком и землей), Сso(между датчиком и объектом) и C0g (между объектом и землей). Электрод соединен с экраном через повторитель напряжения. Частотно-модулированный сигнал поступает в компьютер робота, управляющий движением его руки. Такое устройство позволяет детектировать соседние проводящие объекты на расстоянии 30 см.

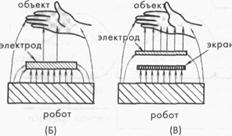
Рис. 1.6. Емкостной датчик приближения. Управляемый экран располагается на металлической
руке заземленного робота (А). Без экрана электрическое поле в основном сосредоточено между электродом и
роботом (Б), тогда как экран помогает перенаправить поле в область между электродом и объектом (В)
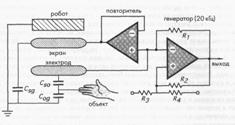
Рис. 1.7. Упрощенная схема частотного модулятора, управляемого входными емкостями
6.4. Электростатические датчики движения
Любой объект может накапливать на своей поверхности статическое электричество. Заряды на поверхности появляются вследствие электростатических явлений (т. е. процессов выделения зарядов при движении объектов, при трении тканей друг об друга, из-за турбулентности воздуха и атмосферного электричества и т. д). Обычно в воздухе находятся либо положительные, либо отрицательные ионы, которые при попадании на тело человека меняют его заряд. В идеальных статических условиях все объекты не заряжены, их объемные заряды равны нулю. Однако в реальных условиях в любом объекте, изолированном хотя бы временно от земли, может возникнуть разбаланс объемного заряда. Другими словами, он становится носителем электрических зарядов.
Любая электронная схема представляет собой набор проводников и диэлектриков. Если схема неэкранирована, все ее компоненты имеют емкостные связи с окружающими объектами. На практике переходные емкости могут быть очень малы - порядка 1 пФ и даже меньше. Для увеличения связи схемы с окружающими объектами на ее вход иногда ставят чувствительный электрод, напоминающий электрод, используемый в емкостных детекторах, рассмотренных в разделе 1.3. Электрод может быть выполнен в форме проводящей пластины, надежно изолированной от земли.
Между электродом и окружающими объектами всегда устанавливается электрическое поле, если хотя бы один из них является носителем зарядов. Другими словами, все распределенные конденсаторы, сформированные между электродом и соседними объектами, заряжаются статическими или слабо меняющимися электрическими полями. Когда вблизи электрода нет движущихся объектов электрическое поле там либо стационарно, либо меняется сравнительно медленно.
Если носитель заряда (человек или животное) меняет свое положение (удаляется или в окрестности электрода появляется новый объект - носитель заряда), статическое электрическое поле нарушается. Это приводит к перераспределению зарядов между переходными конденсаторами, включая те, которые сформированы между входным электродом и окружающими объектами. Величина зарядов на поверхности объектов зависит от их природы и атмосферных условий. Например, человек в сухой одежде, идущий по ковру, переносит в миллион раз больший заряд, чем человек в мокрой одежде, вошедший в помещение после дождя. Электронная схема должна быть адаптирована под конкретные условия, в которых ей предстоит работать. Другими словами, предназначение данной системы заключается в преобразовании переменных индуцированных зарядов на входах в электрические сигналы, которые далее усиливаются и поступают в устройства обработки данных. Таким образом, статическое электричество, являющееся обычным физическим явлением, можно использовать для формирования переменных электрических сигналов для детектирования движения объектов.
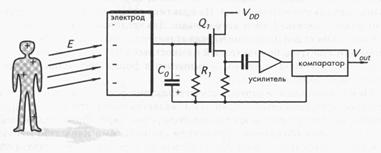
Рис. 1.8. Однополярный электростатический детектор движения
На рис. 1.8 показан однополярный электростатический детектор движения. Он состоит из проводящего электрода, подключенного на вход аналогового преобразователя импеданса, реализованного на основе МОП транзистора Q1, резистора смещения R1, входного конденсатора С0, усилителя и оконного компаратора. Вся схема кроме электрода, как правило, экранируется. Электрод же подвержен воздействию окружающей среды и образует с внешними объектами емкостные связи, которые можно выразить в виде конденсатора Сp . На рис. 1.8 источником статического электричества выступает человеческое тело, на поверхности которого распределены положительные заряды. Будучи носителем зарядов, тело формирует электрическое поле с напряженностью Е. Это поле индуцирует на электроде отрицательные заряды. В стационарных условиях, когда человек находится без движения, напряженность поля остается постоянной, а входная емкость С0 разряжается через резистор R1. Для того чтобы схема обладала высокой чувствительностью, сопротивление резистора R1, должно быть очень большим - порядка 10'° Ом и даже выше.
При движении человека напряженность электрического поля меняется. Это приводит к появлению на входном конденсаторе С0 электрического заряда, что сказывается на величине напряжения на резисторе R1, которое через разделительный конденсатор попадает на усилитель и далее на вход оконного компаратора. Компаратор сравнивает пришедший сигнал с двумя пороговыми уровнями, как это показано на временных диаграммах (рис. 1.9Б). Один пороговый уровень обычно выше базовой линии статического сигнала, а другой - ниже. При движении человека сигнал на входе компаратора отклоняется либо вверх, либо вниз, пересекая один из пороговых уровней. Выходной сигнал компаратора представляет собой серию прямоугольных импульсов, которая может быть подана в устройство обработки данных. Следует отметить, что в отличие от емкостных детекторов движения, являющихся активными устройствами, электростатические датчики относятся к пассивным схемам.
Существует несколько источников помех, которые могут привести к ложным срабатываниям электростатических детекторов: 60 или 50-ти герцовые сетевые наводки, электромагнитные поля от радиостанций, силовые электрические установки, молнии и т. д. Большинство перечисленных помех формирует вокруг детектора довольно равномерные электрические поля, которые могут быть скомпенсированы при использовании схемы с симметричными входами и высоким КОСС.
1.5. Оптоэлектронные детекторы движения
Оптоэлектронные детекторы движения являются самыми популярными датчиками, используемыми в охранных системах. Они используют электромагнитные излучения в оптическом диапазоне длин волн: 0.4...20 мкм. Этот диапазон включает в себя видимую, ближнюю ИК и часть дальней ИК областей спектра. Основное назначение оптоэлектронных детекторов - обнаружение двигающихся людей и животных. Такие детекторы работают на расстоянии до нескольких сотен метров и в зависимости от конкретных условий применения могут иметь либо узкое, либо широкое поле наблюдения.
Принцип действия оптических датчиков движения основан на детектировании излучений (либо видимых, либо нет), исходящих от поверхности движущегося объекта в окружающую среду. Таким излучением может быть либо собственное излучение объекта, либо отраженный от него свет внешнего источника. В первом случае речь идет о пассивном детекторе, во втором - об активном. Очевидно, что активный датчик нуждается в дополнительном источнике излучений, который может быть дневным светом, электрической лампой, ИК светоизлучающим диодом (СИД) и т. д. Пассивные детекторы регистрируют излучение среднего и дальнего ИК диапазона спектра от объектов, имеющих более высокие температуры по сравнению с окружающей средой. Оба вида детекторов для обнаружения объектов используют оптическую контрастность.
Оптоэлектронные и ультразвуковые детекторы, а также микроволновые датчики имеют разные области применения. В настоящее время Оптоэлектронные устройства применяются, в основном, для качественного, а не количественного обнаружения присутствия движущихся объектов. Другими словами, Оптоэлектронные детекторы очень полезны для индикации состояния объекта: движется он или стоит, но они не могут отличить один движущийся объект от другого, поэтому они никогда не используются для точного определения расстояния до объекта и измерения его скорости. Основные области применения оптоэлектронных датчиков движения - охранные системы (для обнаружения грабителей), устройства управления подачей энергии (включение и выключение света), а также, так называемые, «умные дома», в которых они управляют различными бытовыми приборами: кондиционерами, фенами, проигрывателями и т. д. Также они могут быть использованы в роботах, игрушках и т. д. Основными достоинствами оптоэлектронных детекторов движения являются простота и низкая стоимость.
1.5.1. Структуры датчиков
Основная структура оптоэлектронного детектора движения показана на рис. 1.9А. Вне зависимости от типа применяемого чувствительного элемента обязательными компонентами детектора являются: устройство фокусировки (линза или фокусирующее зеркало), светочувствительный элемент и пороговый компаратор. Оптоэлектронный детектор движения похож на фотокамеру. Его система фокусировки также создает на фокальной плоскости изображение поля наблюдения. Хотя в нем нет механического затвора, роль пленки в нем играет светочувствительный элемент. Этот элемент преобразует сфокусированный свет в электрический сигнал.
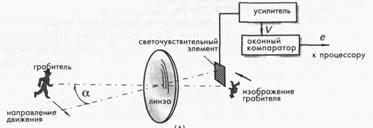
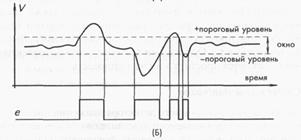
Рис. 6.9. Принципиальная схема оптоэлектронного датчика движения.
Линза формирует изображение движущегося объекта (грабителя). Когда изображение пересекает
оптическую ось датчика, оно попадает на чувствительный элемент (А). При этом на выходе
светочувствительного элемента вырабатывается соответствующий сигнал, который усиливается и попадает
на оконный компаратор (Б)
Рассмотрим детектор движения, смонтированный в комнате. Фокусирующая линза создает на фокальной плоскости, где расположен светочувствительный элемент, изображение комнаты. Если комната пустая, изображение является статическим, и выходной сигнал этого элемента является постоянным. Когда злоумышленник проникает в комнату и перемещается в ней, его изображение на фокальной плоскости также движется. В определенный момент времени тело злоумышленника попадает в зону, расположенную под углом а к оси линзы, и его изображение перекрывает часть светочувствительного элемента. Здесь необходимо понять, что на выходе детектора сигнал появляется только тогда, когда изображение объекта попадает на чувствительную поверхность датчика: нет перекрытия - нет сигнала обнаружения. Считаем, что тело злоумышленника создает изображение, электромагнитный поток излучения от которого отличен от потока в стационарном режиме. Тогда выходной сигнал светочувствительного элемента изменится на величину V. Другими словами, для того чтобы обнаружить движущийся объект, его оптическая контрастность должна отличаться от контрастности окружающих предметов.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
