

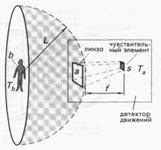
На рис. 1.9Б показан процесс сравнения выходного сигнала с двумя пороговыми напряжениями, выполняемый на оконном компараторе. Назначение компаратора - преобразование аналогового сигнала V в двухуровневый дискретный сигнал, в котором 0 соответствует отсутствию движения объекта, а 1 - обнаружению движущегося объекта. В большинстве случаев сигнал V, снимаемый с чувствительного элемента, перед подачей на компаратор необходимо предварительно усиливать. В момент, когда изображение движущегося объекта попадает на светочувствительный элемент, напряжение на его выходе V пересекает один из уровней компаратора. На выходе компаратора при этом вырабатывается положительное напряжение, соответствующее «1», что означает обнаружение движущегося объекта в зоне наблюдения. Принцип действия этой схемы такой же как у пороговых устройств, применяемых в других типах детекторов присутствия, описанных ранее.
Из рис. 1.9. видно, что оптоэлектронный детектор обладает довольно узкой зоной наблюдения. Если злоумышленник продолжит свое движение в одном направлении, его изображение никогда больше не попадет на чувствительный элемент, и хотя он будет еще находится в помещении, на выходе компаратора будет нулевой сигнал. Величина зоны наблюдения определяется площадью чувствительного элемента, а ее можно менять только в ограниченных пределах, поэтому для большинства случаев требуется применение датчиков, имеющих другие структуры, описанные далее.
1.5.1.1. Составные датчики
В фокальной плоскости фокусирующего зеркала или линзы располагается несколько детекторов. При этом каждый детектор отслеживает узкую зону наблюдения, а все вместе они охраняют довольно большую площадь. Все детекторы либо поочередно подключаются к логическому устройству, либо имеют внутренние соединения друг с другом, обеспечивающие их согласованную работу.
1.5.1.2. Датчики со сложной формой чувствительного элемента
Если площадь чувствительного элемента детектора недостаточно велика для наблюдения за всей требуемой территорией, он может быть оптически разбит на несколько меньших частей. При этом будет получен эквивалент схемы составного датчика. Например, светочувствительный элемент может иметь форму, показанную на рис. 1.10А. Каждая часть такой структуры ведет себя как отдельный детектор излучения. Все эти детекторы соединяются либо последовательно, либо параллельно для формирования единой серпантинной структуры, с выхода которой и снимается сигнал (например, напряжение V), подаваемый в последующие логические устройства. При движении объекта его изображение перемещается вдоль поверхности сложного светочувствительного элемента, попеременно пересекая его рабочие и нерабочие участки. В результате этого с выхода детектора снимается переменный сигнал V. Площадь каждого участка светочувствительного элемента должна быть сравнима с величиной изображения объекта.
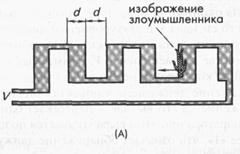
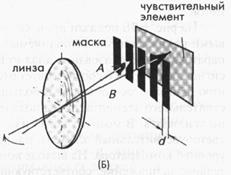
Рис. 1.10. А - светочувствительный элемент со сложной формой,
Б - маска для деления изображения
1.5.1.3. Искажение изображения
Вместо того чтобы усложнять форму чувствительного элемента, можно разделить изображение всей наблюдаемой зоны на несколько частей. Для этого перед достаточно большим чувствительным элементом помещают специальную маску, имеющую форму, показанную на рис. 1.10Б. Маска является непрозрачной, поэтому изображение на поверхности детектора будет появляться только в местах, где ее нет. Принцип действия такого устройства такой же как у датчика со сложной формой чувствительного элемента, описанного в разделе 1.5.1.2.
1.5.1.4. Фасетный фокусирующий элемент
Другой способ расширения поля обзора при использовании детектора малой площади заключается в применении составных фокусирующих элементов. Для этого линза или фокусирующее зеркало делятся на несколько маленьких зеркал или линз со скошенными гранями, называемых фасетами. Каждый фасет создает свое собственное изображение, как показано на рис. 1.11 А. При движении объекта его изображение будет также перемещаться по чувствительному элементу, в результате чего на его выходе сформируется переменный сигнал. Комбинируя различные фасеты, можно получить любую желательную форму зоны наблюдения, как в вертикальной, так и в горизонтальных плоскостях. Применяя правила геометрической оптики, можно определить местоположение каждого фасета линзы или зеркала, их фокусные расстояния, количество фасетов и шаг между ними (расстояние между оптическими осями двух соседних фасетов). Для оценки фокусного расстояния f каждого фасета и шага между соседними элементами p можно применять следующие формулы:
![]() (1.10)
(1.10)
![]() (1.11)
(1.11)
где L - расстояние до объекта, d - ширина чувствительного элемента, n - количество чувствительных элементов (равномерно расположенных), а Δ - минимальное перемещение объекта, которое необходимо детектировать. Пусть в состав датчика входят два чувствительных элемента шириной d = 1мм, расположенных на расстоянии 1 мм друг от друга. При этом необходимо с расстояния L = 10 м обнаруживать перемещение объекта, равное Δ = 25см. Тогда, применяя формулы (1.10) и (1.11), можно найти фокусное расстояние каждого фасета: f = (1000 см)х(0,1см)/25 см=4 см и расстояние между оптическими осями двух соседних фасетов: р = 8мм.
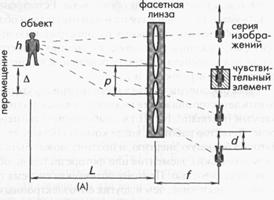

Рис. 1.11. А - фасетная линза создает вокруг чувствительного элемента серию изображений,
Б - охраняемая зона сложной конфигурации, созданная составной фасетной линзой
Комбинируя фасеты, можно реализовать линзу, охватывающую большую площадь наблюдения (рис. 1.11Б), в которой каждый фасет ответственен за сравнительно узкий участок охраняемой территории. Все фасеты проектируют изображение объекта на один и тот же чувствительный элемент. При движении объекта он пересекает границы разных зон, в результате чего происходит модуляция выходного сигнала датчика.
1.5.2. Детекторы движения, работающие в видимом и ближнем ИК диапазонах спектра
Большинство объектов (за исключением очень горячих) излучают электромагнитные волны только дальнего ИК спектрального диапазона. Поэтому для работы рассматриваемой группы детекторов, как правило, необходим дополнительный источник света, освещающий объект. Свет отражается от объекта в направлении фокусирующего устройства, входящего в состав детектора. Источниками света могут быть: солнечный свет или невидимый свет ближнего ИК диапазона от специальных излучателей. Разработка детекторов, работающих в диапазоне видимого света, началось в 1932 году, когда радаров еще не было, а потребность обнаружения летающих объектов (аэропланов) уже появилась. Один из первых детекторов аэропланов был реализован в виде фотокамеры, фокусирующая линза которой, выполненная из стекла, была направлена в небо. Изображение летящего самолета фокусировалось на селеновый фотодетектор, реагирующий на изменение оптической контрастности образа неба. Естественно, что такой детектор мог работать только в дневное время и при отсутствии облаков. Такие ограничения явно не способствовали широкому распространению этих детекторов. Другой тип детекторов движения, работающих в видимом спектральном диапазоне, был разработан для устройств контроля освещения в помещениях и управления интерактивными игрушками.
Для отключения света в комнате при отсутствии в ней людей можно использовать детектор движения видимого диапазона (например, Motion Switch, выпускаемый Intermatic, Inc, IL) в комбинации с таймером и мощным бесконтактным реле. Детектор работает, когда комната освещена. Видимый свет переносит достаточно большую энергию, и поэтому может быть обнаружен при помощи фотогальванических элементов или фоторезисторов, обладающих довольно хорошей чувствительностью. Поэтому оптическая система таких детекторов, как правило, значительно проще, чем в других оптоэлектронных датчиках. В детекторе Motion Switch фокусирующее устройство реализовано в виде точечной линзы (рис. 1.12В). Такая линза представляет собой крошечное отверстие в непрозрачной фольге. Для предотвращения дифракции световых волн диаметр этого отверстия должен быть значительно больше самой длиной детектируемой длины волны. На самом деле детектор Motion Switch имеет линзу с тремя отверстиями, апертура каждого из которых равна 0.2мм (рис. 1.12В). Такая линза теоретически обладает бесконечно большим диапазоном глубины фокусировки, что позволяет располагать фотодетектор на любом расстоянии от нее. Как правило, это расстояние определяется исходя из максимального перемещения объекта и размеров используемого фоторезистора. Применяемый фоторезистор имеет серпантинную конфигурацию чувствительного элемента (рис. 1.12А). Он подключается к схеме, реагирующей только на переменную составляющую выходного сигнала. Когда комната освещена, датчик работает как миниатюрная фотокамера: изображение зоны обзора формируется на поверхности фоторезистора. Перемещение людей в комнате меняет оптическую контрастность этого изображения, что приводит к изменению сопротивления фоторезистора, а, следовательно, и к модуляции электрического тока, проходящего через него. Этот модулированный сигнал усиливается и подается на компаратор, где сравнивается с заранее установленным пороговым уровнем. При превышении этого уровня компаратор вырабатывает электрические импульсы, сбрасывающие таймер, установленный на 15 мин. Если в течение 15 минут не было обнаружено никаких движений, таймер отключает свет в комнате. После этого свет может быть включен только ручным способом, поскольку данный детектор движения в темноте не работает.
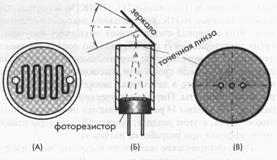
Рис. 1.12. Простой оптический детектор движения, используемый в системах отключения света и интерактивных
игрушках: А - чувствительная поверхность фоторезистора, Б - ровное зеркало и точечная линза формируют
изображение на поверхности фоторезистора, В - точечная линза
1.5.3. Детекторы движения, работающие в дальнем ИК диапазоне
Другая разновидность детекторов движения работает в оптическом диапазоне тепловых излучений, который также называется дальним ИК диапазоном. Такие детекторы реагируют на изменение теплового потока, поступающего на чувствительный элемент, возникающее при движении объекта. В этом разделе будет обсуждаться метод обнаружения двигающихся людей, хотя при небольших доработках этот способ применим и для горячих, и для холодных объектов.
Принцип теплового метода детектирования движущихся объектов основан на физической теории излучения электромагнитных волн телами, температура которых превышает уровень абсолютного нуля.
Для этого метода важно, чтобы температура поверхности объекта отличалась от температуры окружающей среды, т. е. необходимо, чтобы существовал температурный контраст. Интенсивность теплового излучения, выделяемого с поверхности любых объектов, определяется законом Стефана-Больцмана:
![]()
Если температура объекта выше температуры окружающей среды, его тепловое излучение смещается в сторону коротких длин волн и интенсивность его усиливается. Многие из объектов, движения которых необходимо обнаруживать, являются неметаллами, поэтому излучаемая ими тепловая энергия распределяется достаточно равномерно в виде полусферы. Более того, почти все диэлектрические объекты обладают высокой излучающей способностью. Кожа человека является одним из лучших излучателей, ее коэффициент излучения превышает 90%. Большинство тканей также имеют высокую излучающую способность - 0.7В следующих разделах будут описаны два типа детекторов движения дальнего И К диапазона. Первый из них реализован на основе пассивного ИК датчика, а второй использует активные ИК элементы.
1.5.3.1. Детекторы движения на основе пассивных И К элементов
Такие детекторы часто применяются в охранных системах и устройствах управления освещением. Пассивные ИК (ПИК) чувствительные элементы реагируют на излучения дальнего ИК спектрального диапазона с длинами волн в интервале мкм. Этот интервал соответствует тепловому излучению человеческого тела. В таких детекторах могут принципиально использоваться три типа чувствительных элементов: терморезисторы, термоэлементы и пироэлектрики. Но благодаря своей простоте, низкой стоимости, высокой чувствительности и широкому динамическому диапазону, в детекторах движения чаще всего применяются пироэлектрические элементы. рассматриваются некоторые типы пироэлектрических датчиков. Здесь, в этом разделе, приведены примеры практического использования этого эффекта при разработке датчиков.
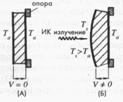
Пироэлектрические материалы вырабатывают электрические заряды в ответ ни тепловой поток, проходящий через них. В упрощенном виде можно считать, что пироэлектричество появляется вследствие теплового расширения материалов (рис. 1.13). Поглощенное тепло заставляет расширяться переднюю часть чувствительного элемента. Поскольку все пироэлектрики также обладают пьезоэлектрическими свойствами, возникшее в результате расширения напряжение приводит к появлению зарядов на электродах элемента. Это означает, что между электродами, расположенными с двух сторон элемента, возникает разность потенциалов. К сожалению, пьезоэлектрический эффект здесь играет отрицательную роль. Поскольку если на датчик действуют паразитные внешние механические силы, они также приводят к появлению зарядов на электродах, которые часто трудно отличить от полезного сигнала.
| Рис. 1.13. Упрощенная модель пироэлектрического эффекта, как следствия пьезоэлектричества. Первоначально элемент имеет равномерную температуру (А); под действием теплового излучения передняя сторона элемента расширяется, что приводит к появлению на электроде зарядов (Б) |
Для того чтобы разделить заряды, формируемые тепловым и пьезоэлектрическим способами, пироэлектрические датчики обычно изготавливают симметричными (рис. 1.14А), т. е. внутри корпуса размещают два абсолютно одинаковых элемента, выходы которых подключают к электронной схеме. При одновременной (синфазной) подаче на эти элементы одинаковых входных сигналов (помех) они будут взаимно уничтожаться, поэтому на выходе датчика сохранится нулевой (или постоянный) уровень сигнала. Основная идея датчика заключается в том, что тепловой поток, создаваемый при движении объекта, дойдет до чувствительных элементов в разные моменты времени, в результате чего на выходе детектора уровень сигнала изменится.
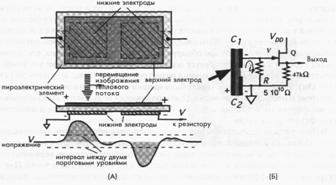
Рис. 1.14. Симметричный пироэлектрический датчик. А - чувствительный элемент, состоящий из
переднего (верхнего) электрода и двух нижних электродов, нанесенных на общую подложку.
Тепловой поток, от движущегося объекта, перемещается слева направо, формируя переменное
напряжение на резисторе Л (Б).
Один из способов изготовления симметричного датчика заключается в нанесении двух пар электродов с двух сторон пироэлектрического элемента. Каждая пара формирует конденсатор, заряжаемый либо от теплового потока, либо от механических напряжений. Электроды на верхней стороне датчика объединяются вместе, формируя один непрерывный электрод, в то время как нижние электроды остаются разделенными. Таким образом, получается последовательное соединение двух конденсаторов. В зависимости от стороны пироэлектрического элемента, на которой располагаются электроды, выходной сигнал, возникающий от воздействия теплового потока, будет иметь либо положительную, либо отрицательную полярность. В некоторых случаях для наблюдения за территорией сложной формы может потребоваться применение большего количества чувствительных электродов. Но, по-прежнему, для лучшего подавления синфазных помех количество пар электродов должно быть четным. При этом располагать электроды необходимо геометрически симметрично. Иногда такое соединение называется гребенчатым электродом.
Симметричный чувствительный элемент следует так монтировать на подложке, чтобы обе части датчика при воздействии на них одинаковых внешних факторов вырабатывали идентичные выходные сигналы. В любой момент времени оптический элемент детектора фокусирует тепловое изображение объекта на поверхность только одной части датчика, на которой расположена единственная пара электродов. Очевидно, что при этом заряд возникает только на одной паре электродов, подверженных действию теплового потока. При перемещении теплового изображения объекта от одного электрода к другому ток I, текущий от чувствительного элемента через резистор R (рис. 1.14Б), меняется от нуля до положительного максимума, затем до нуля и до отрицательного максимума и опять до нуля (нижняя часть рис. 1.14А). Полевой транзистор Q с управляющим p-n-переходом используется в качестве преобразователя импеданса. Значение резистора R должно быть очень большим. Рассмотрим следующий пример. Типовой переменный ток, вырабатываемый детектором при обнаружении движущегося человека, составляет порядка 1 пА (10~12 А). Если требуется получить на выходе напряжение V = 50 мВ, в соответствии с законом Ома величина резистора должна быть: R = V/I = 50 ГОм (5х 10'° Ом). Такой резистор не может быть напрямую включен в электронную схему, поэтому и необходим транзистор Q, выполняющий роль повторителя напряжения, коэффициент усиления которого близок к единице, а выходной импеданс составляет несколько кОм.
На практике наибольшее распространение получили керамические элементы, что объясняется их низкой стоимостью и простотой изготовления. Пироэлектрический коэффициент керамики зависит от пористости материала, поэтому создавая полости в теле датчика, можно в некоторой степени регулировать его чувствительность. Перспективным материалом является поливинилиден фторид (PVDF), полимерные пленки из которого хотя и не обладают такой же чувствительностью, как твердотельные кристаллы, но имеют неоспоримые достоинства: пластичность и низкую стоимость. К тому же из PVDF можно изготавливать чувствительные элементы разных размеров практически любой формы.
Помимо чувствительных элементов в состав ИК детекторов движения входят фокусирующие устройства. Такими устройствами могут быть параболические зеркала и пластиковые линзы Френеля. Популярность последних в настоящее время увеличивается, что связано с их низкой стоимостью, возможностью придания им заданной формы и тем, что помимо фокусировки они выполняют функции окон, защищающих внутренние части детектора от влаги и загрязнений.
На рис. 1.15А показан детектор движения, реализованный на основе полиэтиленовой многогранной выпуклой линзы Френеля и чувствительного элемента из PVDF пленки. В этом датчике объединены два метода, описанные выше: использование фасетной линзы и составного электрода. Линза и чувствительный элемент имеют одинаковые радиусы кривизны, равные половине фокусного расстояния/ Это необходимо для того, чтобы активный участок сенсорной пленки всегда находился на фокальной плоскости соответствующей грани линзы.
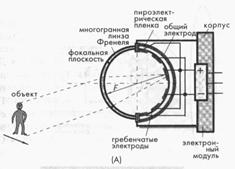
Рис. 1.15. Детектор движения, работающий вдаль-нем ИК диапазоне спектра, состоящий из линзы
Френеля и пироэлектрического сенсора из PVDF: А - внутренняя структура датчика, Б - внешний вид датчика
В состав чувствительного элемента входит пара больших гребенчатых электродов, подсоединенных к положительному и отрицательному входам дифференциального усилителя, расположенного в электронном модуле. Усилитель подавляет синфазные помехи и усиливает напряжение, индуцированное тепловым потоком. На пленку чувствительного элемента со стороны линзы нанесено органическое покрытие, повышающее его поглощающую способность в дальнем ИК спектральном диапазоне. Описываемый детектор обладает хорошей разрешающей способностью (обнаруживает незначительные перемещения объекта на большом расстоянии до него) и очень маленькими размерами (рис. 1.15Б). Миниатюрные детекторы широко применяются в устройствах, где габариты играют решающее значение. Например, в выключателях освещения, где детектор должен монтироваться в стенку переключателя.
1.5.3.2. Анализ эффективности работы пассивного
ИК детектора движущихся объектов (ПИК-детектора)
Несмотря на различия в типах применяемых оптических устройств, все ПИК - детекторы построены на одном физическом явлении - пироэлектричестве. Для оценки рабочих характеристик таких датчиков сначала необходимо определить мощность ИК излучений (тепловой поток), которую чувствительный элемент преобразует в электрические заряды. Оптическое устройство фокусирует излучение от объекта в миниатюрный тепловой образ на поверхности сенсора. Энергия от этого образа поглощается чувствительным элементом и конвертируется в тепло. Это тепло, в свою очередь, превращается в пироэлектрическом элементе в электрический ток.
| Рис. 1.16. Формирование теплового образа на поверхности чувствительного элемента ПИК-детектора движения |
Для оценки уровня мощности излучения на поверхности датчика необходимо сделать несколько предположений:
- Двигающимся объектом является человек, эффективная площадь поверхности которого равна b (рис. 1.16). При этом температура в любой точке его поверхности, выраженная в Кельвинах, равна Тb.
- Объект является источником диффузионного (рассеянного) излучения, т. е. его излучение равномерно распределено внутри полусферы, площадь которой равна A=2πL2.
- Фокусирующее устройство позволяет получить четкое изображение объекта, расположенного на любом расстоянии.
- В дальнейших расчетах считаем, что площадь поверхности линзы равна а, а температура сенсора (в Кельвинах) Та совпадает с температурой окружающей среды.
Полная мощность ИК излучения (тепловой поток), испускаемая объектом, может быть найдена при помощи закона Стефана-Больцмана:
![]() (1.12)
(1.12)
где ![]() - постоянная Стефана - Больцмана, а ea и eb - коэффициенты излучения объекта и окружающей среды. Если температура объекта выше температуры окружающей среды, вся излучаемая ИК энергия направлена от него - в открытое пространство. Поскольку объект является источником рассеянного излучения, можно считать, что на равноудаленных от него расстояниях плотность потока одинакова. Другими словами, интенсивность ИК излучения распределена равномерно вдоль сферической поверхности радиуса L.
- постоянная Стефана - Больцмана, а ea и eb - коэффициенты излучения объекта и окружающей среды. Если температура объекта выше температуры окружающей среды, вся излучаемая ИК энергия направлена от него - в открытое пространство. Поскольку объект является источником рассеянного излучения, можно считать, что на равноудаленных от него расстояниях плотность потока одинакова. Другими словами, интенсивность ИК излучения распределена равномерно вдоль сферической поверхности радиуса L.
Считая, что поверхность объекта является идеальным излучателем, а окружающая среда - идеальным поглотителем (т. е. ea = eb =1), можно найти плотность потока излучения на расстоянии L:
![]() (1.13)
(1.13)
где es - коэффициент поглощения чувствительного элемента. Эффективность линзы (ее коэффициент пропускания) у теоретически меняется в диапазоне 0...0.92, в зависимости от свойств материала линзы и ее конструкции. Для полиэтиленовых линз Френеля g лежит в пределах 0.4...0.7. Пренебрегая нелинейностью, вызванной четвертой степенью температур в уравнении (1.13), мощность теплового излучения, поглощенного элементом, можно выразить в виде:
![]() (1.14)
(1.14)
Отсюда видно, что эта мощность обратно пропорциональна квадрату расстояния до объекта и прямо пропорциональна площадям линзы и объекта. Важно отметить, что в случае использования многогранной линзы, под параметром а понимается площадь отдельной грани. Если объект теплее сенсора, поток Фs является положительным. А если объект холоднее сенсора, поток становится отрицательным, что означает изменение его направления, т. е. тепло переходит от датчика к объекту. В реальной жизни это происходит тогда, когда человек входит в теплую комнату с мороза. В дальнейших рассуждениях будем считать, что поток всегда положительный.
Максимальное рабочее расстояние при заданных условиях определяется по уровню шума детектора. Для надежного обнаружения движений объекта максимальная мощность шума должна быть в 3...5 раз меньше уровня минимального сигнала.
Пироэлектрические датчики являются преобразователями потока тепловой энергии в электрический заряд. При передаче тепловой энергии всегда формируется градиент температур вдоль толщины чувствительного элемента. В рассматриваемом детекторе передняя сторона сенсора толщиной h обращена к линзе, а обратная сторона направлена на внутреннюю стенку корпуса датчика, температура которого обычно равна температуре окружающей среды, т. е. Та. На переднюю сторону сенсора нанесено специальное покрытие для увеличения его коэффициента поглощения (в идеале до 1). Когда передняя часть сенсора поглощает тепловой поток Фs, ее температура увеличивается, и тепло начинает распространяться к его задней части. Поскольку чувствительный элемент обладает пироэлектрическими свойствами, в ответ на проходящий через него тепловой поток на его поверхности начинают образовываться электрические заряды.
Температура чувствительного элемента при прохождении через него потока ИК излучения меняется со скоростью, определяемой выражением:
![]() (1.15)
(1.15)
где Фs - мощность поглощенного излучения, С - теплоемкость элемента, t - время. Это уравнение справедливо только в течение очень короткого интервала времени (практически только в начальный момент, когда на сенсор начинает действовать тепловой поток), поэтому оно используется лишь для оценки величины сигнала. Электрический ток, вырабатываемый чувствительным элементом, может быть найден из фундаментальной формулы:
![]() (1.16)
(1.16)
где Q - электрический заряд, образованный на электродах чувствительного элемента. Величина этого заряда определяется пироэлектрическим коэффициентом сенсора Р, его площадью s и перепадом температуры dT:
![]() (1.17)
(1.17)
Тепловая емкость элемента С может быть получена из выражения:
![]() (1.18)
(1.18)
где с - удельная теплоемкость, s - площадь, h - толщина чувствительного элемента. Подставляя уравнения (1.15), (1.17) и (1.18) в выражение (1.16), оценим пиковый ток, генерируемый сенсором в ответ на падающий тепловой поток:
![]() (1.19)
(1.19)
Для вывода соотношения между током и движением объекта выражение (1.14) надо подставить в (1.19):
![]() . (1.20)
. (1.20)
На основе анализа уравнения (1.20) можно сделать несколько выводов. Первое отношение этого выражения характеризует детектор, а оставшаяся часть - объект. Пироэлектрический ток прямо пропорционален разности температур (тепловой контрастности) между объектом и окружающей средой. Он также пропорционален площади поверхности объекта, направленной в сторону детектора. Несмотря на третью степень, влияние температуры Та на величину тока невелико. Чем тоньше пироэлектрический элемент, тем выше чувствительность детектора. Площадь линзы напрямую связана с амплитудой сигнала. С другой стороны, если линза фокусирует на чувствительный элемент целое изображение объекта, площадь датчика не влияет на величину пироэлектрического тока.
Для дальнейшего анализа уравнения (1.20) найдем напряжение на резисторе R, которое можно использовать для детектирования движения объекта. Считаем, что чувствительный элемент изготовлен из PVDF пленки и обладает следующими свойствами: Р=25 мкКл/К×м2, с =2,4×106 Дж/м3 ×К, h = 25мкм. При этом площадь линзы равна а = 1 см2, g = 0.6, R = 109Ом (1 ГОм). Площадь поверхности объекта b = 0,1 м2, его температура Тb = 27°С, а температура окружающей среды Та = 20°С. Тогда при помощи уравнения (1.20) можно найти зависимость выходного напряжения от расстояния L от детектора до объекта. Полученная зависимость показана на рис. 1.17.
| Рис. 1.17. Расчетная и экспериментальная зависимости амплитуды выходного сигнала ПИК детектора движения от расстояния до объекта |
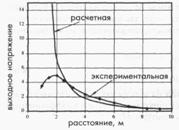
Графики на рис. 1.17 справедливы при условии, что изображение объекта не превышает площадь чувствительного элемента, и что оптическая система обеспечивает четкое изображение объекта, независимо от расстояния до него. На практике эти условия часто не выполняются, особенно при небольших расстояниях до объекта, где изображение объекта не только выходит за границы фокальной плоскости, но также может попасть на нерабочие участки симметричного чувствительного элемента. Способ снижения амплитуды сигнала при коротких расстояниях до объекта очевиден: нельзя допускать, чтобы напряжение превышало соответствующие расчетные значения.
ДЕТЕКТОРЫ ПОЛОЖЕНИЯ, ПЕРЕМЕЩЕНИЙ И УРОВНЯ
Определение положения физических объектов и их перемещений является важной функцией многих автоматизированных систем. Она необходима практически для всех АСУТП, систем управления транспортными потоками, охранных систем, без нее не может обойтись ни один робот. Под определением положения физического объекта понимается нахождение его координат (линейных или угловых) по отношению к заданной точке. Под перемещением объектов подразумевается их передвижение из одного положения в другое, находящееся от первого на определенном расстоянии или под определенным углом. Другими словами, перемещение всегда определяется по отношению к исходному положению объекта. Для обнаружения опасных расстояний между двумя объектами обычно применяются детекторы сближения. Такие детекторы, по существу, являются пороговыми устройствами, реализованными на базе датчиков положения объекта. Датчики положения - это, как правило, линейные устройства, выходные сигналы которых соответствуют расстоянию между объектом и опорной точкой. Детекторы сближения являются более простыми устройствами, сигналы на выходе которых появляются только в случае обнаружения критического расстояния до объекта. Например, во многих роботах и движущихся механизмах автоматизированных систем применяется очень простой, но очень надежный датчик сближения - концевой выключатель, в состав которого входит пара либо нормально замкнутых, либо нормально разомкнутых контактов. Когда объект при своем движении механически размыкает или замыкает эти электрические контакты, концевой выключатель посылает сигнал в управляющее устройство. Этот сигнал указывает на то, что объект достиг своего конечного положения. Однако контактные переключатели имеют ряд недостатков: высокую механическую нагрузку на движущиеся объекты, гистерезис и т. д.
Детекторы перемещений часто являются составными частями более сложных датчиков, для которых обнаружение движущихся объектов - только одна из нескольких ступеней процесса преобразования сигнала. Пример такого составного преобразователя - датчик давления, в котором давление приводит к перемещению диафрагмы, а перемещение диафрагмы, в свою очередь, вызывает изменение выходного электрического сигнала. Из приведенных примеров видно, что датчики перемещений, некоторые из которых описаны в данной главе, не только применяются самостоятельно, но и входят в состав многих других детекторов, рассматриваемых в других главах.
Большинство датчиков положения и перемещений являются статическими устройствами, быстродействие которых, как правило, не сказывается на рабочих характеристиках систем. Однако, производители таких датчиков обычно приводят в документации величину максимальной скорости реакции. Но в этой главе рассматриваются только статические датчики. Динамические датчики, чьи выходные сигналы, по определению, являются временными функциями, будут описаны в следующих главах.
Перед тем как приступить к разработке или выбору детектора положения и перемещения, необходимо ответить на следующие вопросы:
1. Какова величина и тип измеряемых перемещений? (существует два типа перемещений: угловой и линейный)
2. Какой должна быть разрешающая способность и точность?
3. Из чего изготовлен объект, перемещение которого необходимо измерить? (из металла, пластмассы, жидкости, ферромагнитных материалов и т. д)
4. Какой размер пространства отведен для монтажа датчика?
5. Каким должен быть диапазон измерений?
6. В каких условиях окружающей среды предстоит работать датчику? (влажность, температура, источники помех, вибрация и т. д.)
7. Какой должна быть потребляемая мощность датчика?
8. Каким может быть срок службы датчика? (этот параметр тесно связан с продолжительностью службы всей системы)
9. Какое количество датчиков необходимо изготовить? (ограниченное число, среднее количество, серийный выпуск)
10. Какой должна быть стоимость датчика?
Тщательный предварительный анализ помогает не допустить нежелательных промахов в дальнейшем.
1. Потенциометрические датчики
Датчики положения и перемещений часто реализуются на основе линейных или поворотных потенциометров. Принцип действия таких устройств основан на уравнении:
![]()
где R - сопротивление; r - удельное сопротивление; l - длина; a - площадь поперечного сечения проводника.
Из этого уравнения следует, что сопротивление проволочного резистора зависит от длины провода. Таким образом, если перемещение объекта будет связано с изменением положения ползунка потенциометра, получится устройство, контролирующее положение объекта, т. е. детектор перемещений. Потенциометрические преобразователи относятся к активным устройствам, поскольку для определения величины сопротивления через них должен протекать электрический ток, т. е. они нуждаются в дополнительном источнике возбуждения (например, в источнике постоянного тока). На рис. 1 А показана принципиальная схема потенциометрического датчика перемещений. На практике процедуру измерения сопротивления заменяют процедурой определения падения напряжения на этом сопротивлении, которое для линейного потенциометра всегда пропорционально величине перемещения d:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
