


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Техническая документация
Прототип системы манипуляции для лесозаготовок
1. Назначение и цели
Прототип системы манипулятора для лесозаготовок создается с целью поиска оптимального инженерного решения для систем подобного типа, следовательно он должен как можно точнее имитировать образец, которым является двухзвенный манипулятор на вращающейся относительно вертикальной оси основе. Первое звено – неизменной длины, второе – переменной длины. На конце второго звена – свободно висящий захват. Требуется обеспечение управляемого вращения захвата вокруг собственной оси. Главная функция захвата на конце второго звена манипулятора – обеспечивать надежное зажатие в нем древесных бревен. Система должна предусматривать функцию контроля надежности захвата бревна.
2. Строение
Данная модель собрана на базе конструктора TETRIX с использованием LEGO.
2.1. Основа
За основу робота была взята деревянная платформа, на ней жестко закреплена шестеренка, через центр которой пропущена ось, с надетой на неё подставкой. На подставке установлен привод, с маленькой шестеренкой. Блоки управления и сам манипулятор установлены на этой подставке. 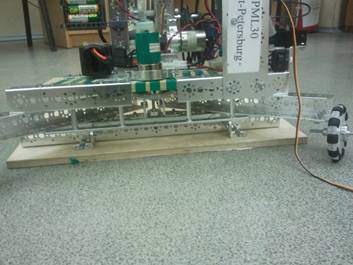
2.2. Первое звено
Первое звено представляет собой вертикальную основу, из двух балок, с зажатыми между ними шестеренками, создающими передаточное отношение на мощность и вращающееся в вертикальной оси балку. 
С другой стороны установлена балка с противовесом, длинна которого подобрана таким образом, чтобы она не мешала движению манипулятора, и была максимальной.

На конце первого звена с двух сторон установлены фиксаторы, между которыми вращается второе звено. Данная система обеспечивает надёжную фиксацию второго звена, и предотвращает его шатание.
2.3. Второе звено
Второе звено состоит из двух реек, видвигающихся на 25см, на одном из концов которых установлен привод, обеспечивающий вращение второго звена вокруг горизонтальной оси.

Выдвижение данной системы, а также возвращение её в исходное положение обеспечивает система из лесок, которые наматываются на ось, вращаемую сервоприводом с помощью червячной системы. На данный сервопривод был установлен реостат с целью изменения его скорости за счет изменения сопротивления электрической цепи.
2.4. Захват
На конце выдвигающейся части установлена ось, на которой крепится сервопривод с захватом. Сам захват представляет собой привод Lego, на подвижной части которого закреплены 4 шестеренки, с прикрепленными к ним изогнутыми балками.

Такая конструкция обеспечивает надежный захват бревна любого диаметра. Так же с помощью данного захвата можно брать не только бревна, но и камни и другие предметы разнообразных форм.
3. Управление
Управление образцом осуществляется с помощью геймпада Logitech f310.
Данный контроллер присоединен к компьютеру по USB. На компьютере установлена программа RobotC. Робот подключен к компьютеру через Bluetooth.
Первое и второе звено управляются с помощью соответствующих джойстиков, выдвижение второго звена осуществляется с помощью кнопки A, возвращение в исходное положение Х, вращение вокруг вертикальной оси влево LT, вправо RT, захват объекта LD, возвращение в исходную позицию захвата RD.
Так же существует программа «arm» с помощью которой можно управлять всеми частями робота по отдельности с микрокомпьютера NXT.
