


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
Федеральное образовательное учреждение
высшего профессионального образования
«ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к разделу «Томографические изображения, восстанавливаемые из проекций с аддитивным шумом » спецкурса «Применение томографических методов в медицинской диагностике»
для студентов специальности «Прикладная математика»
Ростов-на-Дону
2008
Печатается по решению кафедры теории упругости факультета математики, механики и компьютерных наук ЮФУ, протокол N1 от 01.01.01 года.
Методические указания разработаны доктором физико-математических наук, профессором кафедры теории упругости .
1 СТАТИСТИЧЕСКОЕ ОПИСАНИЕ ИЗОБРАЖЕНИЯ
С формальной точки зрения случайное изображение описывается случайной функцией двух переменных ![]() . В математической статистике такая случайная функция рассматривается как некоторое двумерное случайное поле, и каждое полученное изображение отождествляется с конкретной реализацией данной случайной функции
. В математической статистике такая случайная функция рассматривается как некоторое двумерное случайное поле, и каждое полученное изображение отождествляется с конкретной реализацией данной случайной функции ![]() (или соответственно двумерного случайного поля). Полное описание любой случайной функции задается функционалом плотностей вероятностей [1]. Будучи предельным аналогом многомерной плотности вероятностей, данный функционал позволяет сравнить между собой величины вероятностей, которые соответствуют восстановлению различных изображений. Оперируя таким функционалом, можно проанализировать потенциальную точность измерения неизвестных параметров, закодированных в изображении, построить для них оптимальные оценки, синтезировать алгоритмы распознавания.
(или соответственно двумерного случайного поля). Полное описание любой случайной функции задается функционалом плотностей вероятностей [1]. Будучи предельным аналогом многомерной плотности вероятностей, данный функционал позволяет сравнить между собой величины вероятностей, которые соответствуют восстановлению различных изображений. Оперируя таким функционалом, можно проанализировать потенциальную точность измерения неизвестных параметров, закодированных в изображении, построить для них оптимальные оценки, синтезировать алгоритмы распознавания.
В то же время очевидно, что наблюдатель, зрительно оценивающий случайное изображение, не пользуется такой полной информацией, которая предоставляется функционалом плотностей вероятностей, а ориентируется (как это следует из приведенных выше рассуждений) на некоторые упрощенные характеристики. В математической статистике [1] упрощенными характеристиками для случайных полей являются: среднее значение  , дисперсия
, дисперсия
![]() , (1.1)
, (1.1)
и корреляционная функция ![]() или соответствующий ей коэффициент корреляции
или соответствующий ей коэффициент корреляции ![]() , равные
, равные
![]() , (1.2)
, (1.2)
 . (1.3)
. (1.3)
В этих выражениях верхняя горизонтальная черта означает проведение операции усреднения.
Обсудим более подробно приведенные величины, а затем рассмотрим, как с их помощью описывается случайная структура получаемого изображения. Для однородного случайного поля корреляционная функция зависит от разности координат ![]() и
и  так что в этом случае
так что в этом случае
![]() . (1.4)
. (1.4)
Обратное преобразование Фурье от ![]()
 (1.5)
(1.5)
представляет собой пространственный спектр случайного однородного поля  .
.
Статистически однородные поля, у которых корреляционная функция зависит не от направления вектора ![]() , а только от его модуля
, а только от его модуля ![]() называются статистически изотропными. В этом случае, переходя в преобразовании Фурье, обратном (1.5), к полярным координатам в обеих плоскостях
называются статистически изотропными. В этом случае, переходя в преобразовании Фурье, обратном (1.5), к полярным координатам в обеих плоскостях ![]() и
и ![]() , имеем
, имеем
 , (1.6)
, (1.6)
где ![]() — функция Бесселя,
— функция Бесселя, ![]() и
и
![]() . (1.7)
. (1.7)
Функция  обладает важным свойством — с ростом величины
обладает важным свойством — с ростом величины ![]() она монотонно уменьшается.
она монотонно уменьшается.
Для изотропного поля можно ввести радиус его корреляции ![]() , т. е. расстояние
, т. е. расстояние ![]() , на котором значительно уменьшается по сравнению с дисперсией
, на котором значительно уменьшается по сравнению с дисперсией ![]() . Часто эффективный радиус корреляции определяется как
. Часто эффективный радиус корреляции определяется как
 . (1.8)
. (1.8)
Примерами корреляционной функции однородного и изотропного случайного поля могут служить гауссовская и экспоненциальная функции:
![]() , (1.9)
, (1.9)
![]() . (1.10)
. (1.10)
У гауссовской функции корреляции ![]() , а у экспоненциальной
, а у экспоненциальной ![]() .
.
2 КРИТЕРИИ КАЧЕСТВА СЛУЧАЙНЫХ ИЗОБРАЖЕНИЙ
Изучив статистическое описание случайного изображения (что равносильно изучению его статистических характеристик), можно предсказать качество конкретно получаемой реализации. Это означает, что можно заранее сформулировать требования, которые должны выполняться при томографии для того, чтобы качество восстанавливаемого изображения удовлетворяло заданным требованиям. Однако необходимо предварительно формализовать понятие «качественное изображение», определить адекватную количественную оценку этого понятия или сформулировать количественные критерии качества получаемого изображения.
К сожалению, в настоящее время не существует универсального качественного критерия, на который можно было бы опираться при решении конкретных задач. Связано это с тем, что конечная реакция наблюдателя очень сложна, часто неоднозначна и во многом зависит от чисто субъективных причин, так что трудно, а наверное, и невозможно установить объективно правильный, «общечеловеческий» и все учитывающий единый критерий. Поэтому при оценке качества изображения пользуются отдельными, частными критериями, каждый из которых отражает какую-то определенную особенность формируемого изображения.
В зависимости от того, какую информацию желательно выявить из наблюдаемого изображения, используют тот или иной частный критерий. Приведем некоторые из таких критериев, но предварительно сделаем одно общее замечание, связанное со случайным; характером анализируемого изображения.
Говоря о качестве полученного изображения, мы, в первую очередь, думаем о том, насколько оно похоже на истинное, т. е. на то, которое формируется идеальной оптической системой. Всякое случайное изображение флуктуирует относительно своего среднего изображения. Очевидно, что величина флуктуации невелика, если получаемые случайные изображения похожи на свое среднее изображение. Cамо среднее изображение в общем случае не совпадает с истинным и, в свою очередь, может быть лишь в той или иной степени похоже на него. Поэтому, для того чтобы каждое получаемое случайное изображение с достаточно большой вероятностью было похоже на истинное, не достаточно, чтобы оно мало отличалось от среднего, требуется еще, чтобы и среднее изображение мало отличалось от истинного. Принимая во внимание сказанное, рассмотрим четыре возможных критерия.
Отношение сигнал-шум ![]() . Обычно эту величину определяют как отношение среднего значения к стандартному отклонению, равному квадратному корню из
. Обычно эту величину определяют как отношение среднего значения к стандартному отклонению, равному квадратному корню из ![]() (1.1):
(1.1):
![]() . (2.1)
. (2.1)
Чем больше величина ![]() , тем меньше возможные отклонения наблюдаемого изображения от среднего. Поэтому в том случае, когда среднее изображение мало отличается от истинного или, более точно, это отклонение существенно меньше того, которое обусловливается флуктуациями, величина
, тем меньше возможные отклонения наблюдаемого изображения от среднего. Поэтому в том случае, когда среднее изображение мало отличается от истинного или, более точно, это отклонение существенно меньше того, которое обусловливается флуктуациями, величина ![]() хорошо описывает качество наблюдаемого изображения. Отметим, что отношение сигнал-шум в общем случае разное в разных точках изображения, а также зависит от самого вида данного изображения.
хорошо описывает качество наблюдаемого изображения. Отметим, что отношение сигнал-шум в общем случае разное в разных точках изображения, а также зависит от самого вида данного изображения.
Среднеквадратическое отклонение и проинтегрированное среднеквадратическое отклонение . Первая величина определяется равенством
![]() , (2.2)
, (2.2)
а вторая
 (2.3)
(2.3)
Первая величина представляет собой нормированное среднеквадратическое отклонение восстановленной функции от ее истинного значения в данной точке х, у области восстановления. Вторая величина — это тоже среднеквадратическое отклонение, но проинтегрированное во всей области восстановления ![]() , и соответствующим образом нормированное.
, и соответствующим образом нормированное.
В отличие от первой вторая величина не зависит от точки х, у области восстановления. Так как
![]()
![]()
![]() , (2.4)
, (2.4)
то, вводя обозначения
![]() (2.5)
(2.5)
![]() (2.6)
(2.6)
 (2.7)
(2.7)  (2.8)
(2.8)
имеем
![]() , (2.9)
, (2.9)
![]() . (2.10)
. (2.10)
Представление величин ![]() и
и ![]() в виде суммы двух слагаемых имеет определенный физический смысл. Первое слагаемое
в виде суммы двух слагаемых имеет определенный физический смысл. Первое слагаемое ![]() дает количественную оценку случайных отклонений в наблюдаемом изображении от среднего изображения в данной точке х, у. Аналогично
дает количественную оценку случайных отклонений в наблюдаемом изображении от среднего изображения в данной точке х, у. Аналогично ![]() оценивает значения тех же отклонений, но накопленных по всей области
оценивает значения тех же отклонений, но накопленных по всей области ![]() . Второе слагаемое в (2.9)
. Второе слагаемое в (2.9) ![]() определяет отклонение среднего изображения от истинного в данной точке х, у. Аналогично
определяет отклонение среднего изображения от истинного в данной точке х, у. Аналогично ![]() определяет те же отклонения, но проинтегрированные по области
определяет те же отклонения, но проинтегрированные по области ![]() . Таким образом, если первые слагаемые в (2.9) и (2.10) определяются статистическими характеристиками присутствующих флуктуационных эффектов, то вторые — от них не зависят.
. Таким образом, если первые слагаемые в (2.9) и (2.10) определяются статистическими характеристиками присутствующих флуктуационных эффектов, то вторые — от них не зависят.
Существенно, что в критерии, использующем величину  или
или ![]() , удается не только по отдельности проанализировать влияние флуктуационных эффектов и факта отличия
, удается не только по отдельности проанализировать влияние флуктуационных эффектов и факта отличия  от на
от на
качество изображения, но и легко сопоставить их между собой. С позиций данного критерия оба фактора влияют на качество изображения примерно одинаково, если оба слагаемых в (2.9) и соответственно в (2.10) примерно равны, а нарушение этого приближенного равенства в ту или иную сторону говорит о преобладании того или иного фактора.
Критерии качества, использующие величины ![]() , и
, и ![]() могут быть рассчитаны, если известен вид изображения. Поэтому применение этих критериев на практике подразумевает предварительный выбор каких-то типичных изображений, для которых и определяются величины
могут быть рассчитаны, если известен вид изображения. Поэтому применение этих критериев на практике подразумевает предварительный выбор каких-то типичных изображений, для которых и определяются величины ![]() ,
, ![]() и
и ![]() . Именно по значениям этих величин и формируются требования к условиям формирования изображений. Помимо рассмотренных критериев, которые могут применяться к изображению любого вида, иногда формулируются критерии для каких-то вполне определенных изображений, которые, хотя и не являются типичными для изучаемого эксперимента, но в каком-то смысле приняты за эталонные. Приведем пример такого критерия.
. Именно по значениям этих величин и формируются требования к условиям формирования изображений. Помимо рассмотренных критериев, которые могут применяться к изображению любого вида, иногда формулируются критерии для каких-то вполне определенных изображений, которые, хотя и не являются типичными для изучаемого эксперимента, но в каком-то смысле приняты за эталонные. Приведем пример такого критерия.
Разрешающая способность. Эта величина определяется для изображения, представляющего собой совокупность двух одинаковых точечных источников, и описывает то минимальное расстояние между этими источниками, на котором они уверенно различаются. На рис. 1 приведены характерные зависимости интенсивности в плоскости изображения по прямой проходящей через точки, соответствующие положения этих источников. На рис. 1, а дано распределение интенсивности в среднем изображении, а на рис. 1, б, в — две случайные реализации. Интенсивность в среднем изображении имеет два максимума в точках ![]() и
и ![]() , cоответствующих положению источников, а минимальное значение между ними достигается в точке А, разделяющей расстояние
, cоответствующих положению источников, а минимальное значение между ними достигается в точке А, разделяющей расстояние ![]() пополам.
пополам.
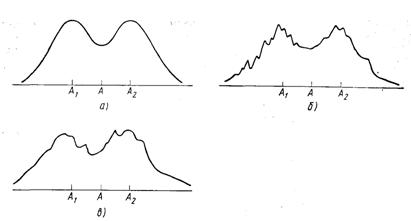
Рис.1. Интенсивность в изображении двух точечных источников: а – среднее значение; б и в – две случайные реализации
Если бы изображение флуктуировало слабо, т. е. практически совпадало со своим средним, то можно было бы воспользоваться критерием Рэлея [2]. Согласно этому критерию ![]() соответствует тому расстоянию, при котором провал в точке А составляет около 19% от максимальной интенсивности. Так как изображение случайно, то получаемые реализации (рис. 1, б, в) лишь похожи на среднее изображение — флуктуируют значения интенсивности в точках расположения источников, а максимальные и минимальные значения уже могут достигаться в других точках. В таких условиях, исходя из смысла заложенного в понятие «разрешающая способность», следовало бы определить величину
соответствует тому расстоянию, при котором провал в точке А составляет около 19% от максимальной интенсивности. Так как изображение случайно, то получаемые реализации (рис. 1, б, в) лишь похожи на среднее изображение — флуктуируют значения интенсивности в точках расположения источников, а максимальные и минимальные значения уже могут достигаться в других точках. В таких условиях, исходя из смысла заложенного в понятие «разрешающая способность», следовало бы определить величину ![]() через минимальное расстояние, на котором оптимальный алгоритм распознавания с большой вероятностью принимает правильное решение о наличии именно двух источников.
через минимальное расстояние, на котором оптимальный алгоритм распознавания с большой вероятностью принимает правильное решение о наличии именно двух источников.
В том случае, когда флуктуации не очень сильные, так что отдельные реализации похожи на свое среднее изображение, можно отказаться от сформулированного точного определения ![]() и ограничиться требованием выполнения двух условий: 1) разность
и ограничиться требованием выполнения двух условий: 1) разность ![]() должна быть положительна и по критерию Рэлея больше
должна быть положительна и по критерию Рэлея больше ![]() ; 2) дисперсия в точке А должна быть меньше (желательно в несколько раз) величины
; 2) дисперсия в точке А должна быть меньше (желательно в несколько раз) величины  . Действительно, поскольку получаемые реализации очень похожи на среднее изображение, можно надеяться, что у большинства из них сохранятся два максимальных значения и их расположение мало отклонится от точек А1 и А2. Тогда возникает вопрос, как, несмотря на имеющиеся флуктуации, заметить эти максимумы. Очевидно, что для этого и должно выполняться второе условие.
. Действительно, поскольку получаемые реализации очень похожи на среднее изображение, можно надеяться, что у большинства из них сохранятся два максимальных значения и их расположение мало отклонится от точек А1 и А2. Тогда возникает вопрос, как, несмотря на имеющиеся флуктуации, заметить эти максимумы. Очевидно, что для этого и должно выполняться второе условие.
Формально оба условия записываются в виде
![]() (2.11)
(2.11)
![]() (2.12)
(2.12)
где ![]() , и чем больше
, и чем больше ![]() , тем с большей вероятностью будет заметен провал.
, тем с большей вероятностью будет заметен провал.
Если разрешающая способность ограничивается только наличием регуляризации, то (2.11) приводит к неравенству [3]
 , (2.13)
, (2.13)
устанавливающему требование к параметру ![]() , при котором могут различаться два точечных источника, удаленных друг от друга на расстояние
, при котором могут различаться два точечных источника, удаленных друг от друга на расстояние ![]() . Когда разрешающая способность зависит и от других причин, следует пользоваться более общим неравенством (2.11). Последнее неравенство (2.12) можно переписать как ограничение на отношение
. Когда разрешающая способность зависит и от других причин, следует пользоваться более общим неравенством (2.11). Последнее неравенство (2.12) можно переписать как ограничение на отношение ![]() , которое по своему виду похоже на величину
, которое по своему виду похоже на величину ![]() (2.1). Однако оно не совпадает с этой величиной, так как в данном случае значения
(2.1). Однако оно не совпадает с этой величиной, так как в данном случае значения ![]() и
и  берутся в разных точках.
берутся в разных точках.
3 ПОСТАНОВКА ЗАДАЧИ. СРЕДНЕЕ ИЗОБРАЖЕНИЕ И ДИСПЕРСИЯ ФЛУКТУАЦИЙ
Детальное исследование статистической структуры томографических изображений начнем с ситуации, в которой измеряемые проекционные данные представляют собой сумму истинных проекций ![]() и некоторого шума
и некоторого шума
![]() , (3.1)
, (3.1)
где ![]() — детерминированная функция, описывающая радоновский образ искомой функции
— детерминированная функция, описывающая радоновский образ искомой функции ![]() ;
; ![]() — однородная случайная функция, у которой
— однородная случайная функция, у которой
![]() , (3.2)
, (3.2)
![]() . (3.3)
. (3.3)
Наличие ![]() - корреляции по параметру
- корреляции по параметру ![]() отражает обычно реализующуюся на практике ситуацию, при которой проекции для различных углов
отражает обычно реализующуюся на практике ситуацию, при которой проекции для различных углов ![]() регистрируются независимо друг от друга. Тогда, естественно, что шумы, сопровождающие их регистрацию, можно считать статистически независимыми, что собственно и означает
регистрируются независимо друг от друга. Тогда, естественно, что шумы, сопровождающие их регистрацию, можно считать статистически независимыми, что собственно и означает ![]() - коррелированность.
- коррелированность.
Спектральную плотность шумовой составляющей по координате s обозначим ![]() , так что
, так что
 . (3.4)
. (3.4)
При рассмотрении конкретных примеров функцию Ks(s) будем брать в виде (1.9)
![]() . (3.5)
. (3.5)
Половину интервала, в котором сосредоточены основные значения функции (3.5), обозначим ![]() , а ее значения оценим по формуле (1.8). Тогда
, а ее значения оценим по формуле (1.8). Тогда
 , (3.6)
, (3.6)
а спектральная плотность
![]() , (3.7)
, (3.7)
В этих равенствах ![]() есть дисперсия шума. При
есть дисперсия шума. При ![]() шум становится некоррелированным и по параметру s. Учитывая известное соотношение
шум становится некоррелированным и по параметру s. Учитывая известное соотношение
 при
при  , (3.8)
, (3.8)
видим, что для того, чтобы в данной ситуации случайная функция ![]() являлась реализацией
являлась реализацией ![]() -коррелированного случайного поля со спектральной плотностью
-коррелированного случайного поля со спектральной плотностью ![]() , необходимо выполнение условия
, необходимо выполнение условия
![]() . (3.9)
. (3.9)
![]() (3.9)
(3.9)
В дальнейшем будем ориентироваться на алгоритм восстановления, описываемый формулой (2.32) [4]
 (3.10)
(3.10)
 (3.11)
(3.11)
Задача состоит в том, чтобы для случая, когда выполняется (3.1) изучить статистические характеристики функции (3.10) и в соответствии с рекомендациями раздела 2 проанализировать их с точки зрения качества восстанавливаемого томографического изображения.
Подставляя (3.1) в (3.10) получаем
![]() (3.12)
(3.12)
 (3.13)
(3.13)
 (3.14)
(3.14)
Функция ![]() совпадает с той функцией, которая была бы восстановлена, если бы использовались бы формулы обращения (3.10) и (3.11), но никакого бы шума не было. Так как предполагается выполнение (3.2), то
совпадает с той функцией, которая была бы восстановлена, если бы использовались бы формулы обращения (3.10) и (3.11), но никакого бы шума не было. Так как предполагается выполнение (3.2), то  . В [3] показано, что
. В [3] показано, что ![]() можно представить в виде
можно представить в виде
![]() , (3.15)
, (3.15)
где ![]()
При использовании регуляризованной формулы обращения среднее томографическое изображение всегда отличается от искомого, и это отличие оказывается тем больше, чем больше регуляризующая функция ![]() отличается от единицы.
отличается от единицы.
Перейдем к вычислению дисперсии восстанавливаемой функции ![]() . Подставим (3.12) в (1.1) и получим
. Подставим (3.12) в (1.1) и получим
![]() . (3.16)
. (3.16)
Далее подставим (3.14) в (3.16) и после выполнения интегрирования получим [3]
![]() (3.17)
(3.17)
Выражение (3.17) позволяет вычислить дисперсию флуктуаций ![]() в восстановленном изображении для любой регуляризирующей функции
в восстановленном изображении для любой регуляризирующей функции ![]() при известном спектре аддитивных шумов. Из (3.17) следуют три вывода: 1) дисперсия не зависит от от формы восстанавливаемого изображения; 2) значение дисперсии не зависит от конкретной точки
при известном спектре аддитивных шумов. Из (3.17) следуют три вывода: 1) дисперсия не зависит от от формы восстанавливаемого изображения; 2) значение дисперсии не зависит от конкретной точки  томографического изображения; 3) чем большую роль в регуляризованном алгоритме играет функция
томографического изображения; 3) чем большую роль в регуляризованном алгоритме играет функция ![]() (т. е. чем больше она подавляет высокие частоты), тем меньше дисперсия.
(т. е. чем больше она подавляет высокие частоты), тем меньше дисперсия.
Пример1.
Пусть ![]() (см. (5.3) в [4]), а
(см. (5.3) в [4]), а ![]() задается (3.7). Подставим эти выражения в (3.17) и получим
задается (3.7). Подставим эти выражения в (3.17) и получим
![]() . (3.18)
. (3.18)
При ![]() (нет регуляризации)
(нет регуляризации)
![]() . (3.19)
. (3.19)
В этом случае ![]() для некоррелированного изображения
для некоррелированного изображения ![]() . Аналогичный расчет для регуляризированного алгоритма учитывает, что
. Аналогичный расчет для регуляризированного алгоритма учитывает, что ![]() и тогда при
и тогда при ![]() получаем в предельном случае
получаем в предельном случае
![]() (3.20)
(3.20)
Согласно (3.20) для ![]() - коррелированного аддитивного шума дисперсия в восстановленном томографическом изображении (
- коррелированного аддитивного шума дисперсия в восстановленном томографическом изображении (![]() ) равнялась бы бесконечности, а для регуляризованной формулы обращения она уменьшалается с ростом стабилизирующего параметра
) равнялась бы бесконечности, а для регуляризованной формулы обращения она уменьшалается с ростом стабилизирующего параметра ![]() .
.
4 КОРРЕЛЯЦИОННАЯ ФУНКЦИЯ ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ
Подставим в (1.2) выражение (3.12) и получим корреляционную функцию для пары точек ![]() и
и ![]()
![]() (4.1)
(4.1)
Вычисление (4.1) подобно вычислению дисперсии для однородного и изотропного поля в п.3 дает [3]
 , (4.2)
, (4.2)
где ![]() - функция Бесселя первого рода нулевого индекса, вектор
- функция Бесселя первого рода нулевого индекса, вектор ![]() имеет компоненты
имеет компоненты ![]() . Сравнивая (4.2) с (1.6), получаем пространственный спектр флуктуаций в томографическом изображении
. Сравнивая (4.2) с (1.6), получаем пространственный спектр флуктуаций в томографическом изображении
![]() , (4.3)
, (4.3)
где под ![]() следует понимать
следует понимать ![]() . В (4.3) первый множитель усиливает высокие частоты, второй подавляет их.
. В (4.3) первый множитель усиливает высокие частоты, второй подавляет их.
Подставляя в (1.8) выражения (4.2) и (3.17), получим радиус корреляции ![]() флуктуаций в томографическом изображении
флуктуаций в томографическом изображении
 . (4.4)
. (4.4)
При получении (4.4) учитывалось соотношение  .
.
Пример2
Пусть ![]() и
и ![]() определяются также как в примере 1. Тогда
определяются также как в примере 1. Тогда
![]() . (4.5)
. (4.5)
Из (4.5) следует, что радиус корреляции в изображении достигает минимального значения при отсутствии регуляризации. Тогда  и, если шум
и, если шум ![]() -коррелирован, то
-коррелирован, то ![]() -корреляция сохраняется и у флуктуаций в томографическом изображении. Наличие регуляризации нарушает эту зависимость. Положив в (4.5)
-корреляция сохраняется и у флуктуаций в томографическом изображении. Наличие регуляризации нарушает эту зависимость. Положив в (4.5) ![]() , получаем
, получаем
![]() (4.6)
(4.6)
и, таким образом, радиус корреляции флуктуаций в изображении при ![]() -коррелированном шуме оказывается пропорционален параметру регуляризации. В общем случае при зафиксированном параметре
-коррелированном шуме оказывается пропорционален параметру регуляризации. В общем случае при зафиксированном параметре ![]() радиус корреляции (4.5) тем больше, чем больше величина
радиус корреляции (4.5) тем больше, чем больше величина ![]() . Эта зависимость сохраняется и при других видах функций
. Эта зависимость сохраняется и при других видах функций ![]() и
и ![]() .
.
В [3] показано, что при ограниченных размерах области, с которой получаются проекции и для которой осуществляется восстановление, изменяются статистические свойства шумов в восстанавливаемом изображении. Однако в точках, достаточно удаленных от границы статистические характеристики шумов практически такие же, как и для неограниченной области.
5 РАЗРЕШЕНИЕ МЕЛКИХ ДЕТАЛЕЙ В ТОМОГРАФИЧЕСКОМ ИЗОБРАЖЕНИИ
Зададимся теперь вопросом о том, какие требования должны выполняться, чтобы в этом изображении могли различаться те или иные мелкие детали. Для решения этого вопроса используем критерий разрешения Рэлея в виде неравенств (2.11), (2.12).
Предположим, что источники одинаковой интенсивности ![]() удалены друг от друга на расстояние
удалены друг от друга на расстояние ![]() и их координаты в плоскости
и их координаты в плоскости ![]() равны
равны  и
и ![]() . Тогда восстанавливаемая функция имеет вид
. Тогда восстанавливаемая функция имеет вид
![]() . (5.1)
. (5.1)
Подставляя (5.1) в (3.15), находим среднее значение восстанавливаемой функции
![]() , (5.2)
, (5.2)
где ![]() . При выборе регуляризирующей функции
. При выборе регуляризирующей функции ![]() такой же как в примерах 1,2, получаем
такой же как в примерах 1,2, получаем
 , (5.3)
, (5.3)
для которой

![]() (5.4)
(5.4)
Пусть требуется так организовать томографический процесс, чтобы два данных точечных источника уверенно различались. Для этого прежде всего согласно критерию Рэлея необходимо выполнить следующее требование: значение ![]() в точке
в точке ![]() , разделяющей расстояние
, разделяющей расстояние ![]() пополам, должно быть меньше
пополам, должно быть меньше ![]() в той точке, где находится источник. Для выполнения этого условия должно выполняться неравенство
в той точке, где находится источник. Для выполнения этого условия должно выполняться неравенство
 . (5.5)
. (5.5)
Из (5.5) следует ограничение на ![]()
![]() . (5.6)
. (5.6)
Теперь используем неравенство (2.12), подставляя в него (3.18), (5.4) и ![]() . Получаем неравенство, которое определяет ограничение на дисперсию шума
. Получаем неравенство, которое определяет ограничение на дисперсию шума
 . (5.7)
. (5.7)
Таким образом, чтобы две заданные точки разрешались, регуляризирующий параметр ![]() должен быть не больше
должен быть не больше ![]() , а дисперсия шума меньше
, а дисперсия шума меньше ![]() :
: ![]() . (5.8)
. (5.8)
Для белого шума (3.9) неравенство (5.8) принимает вид
![]() . (5.9)
. (5.9)
Из (5.9) следует, что максимально допустимая спектральная плотность шума ![]() должна быть меньше, чем меньше расстояние между разрешаемыми источниками и чем меньше их интенсивность
должна быть меньше, чем меньше расстояние между разрешаемыми источниками и чем меньше их интенсивность ![]() .
.
Следует отметить, что ограничение (5.6) на параметр регуляризации ![]() приводит к ограничению на радиус корреляции, так что
приводит к ограничению на радиус корреляции, так что
![]() . (5.10)
. (5.10)
Это неравенство говорит о том, что точечные источники достаточно хорошо различаются только тогда, когда радиус корреляций флуктуаций ![]() в восстановленном изображении не немного меньше половины расстояния между ними.
в восстановленном изображении не немного меньше половины расстояния между ними.
6 ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНОГО ЗНАЧЕНИЯ ПАРАМЕТРА РЕГУЛЯРИЗАЦИИ
Известно [3], что среднеквадратическое отклонение (2.7), (2.8) восстанавливаемой функции от истинной можно представить как сумму двух слагаемых (2.9), (2.10): одно – определяется наличием флуктуаций, а другое – использованием регуляризованного алгоритма. При этом первое слагаемое (2.7) с ростом ![]() уменьшается, а второе (2.8) – увеличивается. Следствием данной зависимости и является существование такого значения параметра регуляризации
уменьшается, а второе (2.8) – увеличивается. Следствием данной зависимости и является существование такого значения параметра регуляризации ![]() параметра
параметра ![]() , которое для выбранного изображения и при заданном уровне шумов обеспечивает минимум среднеквадратического отклонения и в этом смысле является оптимальным.
, которое для выбранного изображения и при заданном уровне шумов обеспечивает минимум среднеквадратического отклонения и в этом смысле является оптимальным.
Оценим параметр ![]() в том случае, когда проекция наблюдается в аддитивном шуме. Для определенности будем предполагать, что восстановление осуществляется во всей плоскости
в том случае, когда проекция наблюдается в аддитивном шуме. Для определенности будем предполагать, что восстановление осуществляется во всей плоскости ![]() , а при проведении вычислений, что
, а при проведении вычислений, что ![]() и
и ![]() описываются также как и в примерах 1, 2. Выполним вычисления (2.7) и (2.8) и получим
описываются также как и в примерах 1, 2. Выполним вычисления (2.7) и (2.8) и получим
 , (6.1)
, (6.1)

(6.2)
Рассмотрим вначале (6.2). Интеграл, входящий в (6.2) описывает ту функцию, которая была бы восстановлена при отсутствии шумов, но при использовании регуляризованного алгоритма
 . (6.3)
. (6.3)
Экспонента в (6.3) имеет максимум в точке  , и при удалении от этой точки ее значения монотонно уменьшаются. Чем меньше значения параметра
, и при удалении от этой точки ее значения монотонно уменьшаются. Чем меньше значения параметра ![]() , тем эта функция является более острой, т. е. тем меньше та область на плоскости
, тем эта функция является более острой, т. е. тем меньше та область на плоскости ![]() , где сосредоточены ее основные значения. Если данную область определить кругом, на границе которого значения экспоненциальной функции уменьшаются в
, где сосредоточены ее основные значения. Если данную область определить кругом, на границе которого значения экспоненциальной функции уменьшаются в ![]() раз по сравнению с ее максимальным значением, то радиус данного круга равен
раз по сравнению с ее максимальным значением, то радиус данного круга равен  .
.
Предположим, что в окрестности точки ![]() функция
функция  на расстоянии
на расстоянии ![]() , существенно превышающем
, существенно превышающем ![]() , практически не изменяется. Это позволяет при вычислении интеграла (6.3) воспользоваться остротой экспоненциальной функции, так что
, практически не изменяется. Это позволяет при вычислении интеграла (6.3) воспользоваться остротой экспоненциальной функции, так что
![]()
![]()
 . (6.4)
. (6.4)
Приближенное равенство (6.4) является тем более точным, чем больше ![]() по сравнению с
по сравнению с ![]() . Таким образом, в точке
. Таким образом, в точке ![]() , при удалении от которой на расстояние
, при удалении от которой на расстояние ![]() функция практически не изменяется, среднее значение реконструируемой функции восстанавливается без искажений, если
функция практически не изменяется, среднее значение реконструируемой функции восстанавливается без искажений, если ![]() . Искажения проявляются в тех точках, где последнее условие не выполняется.
. Искажения проявляются в тех точках, где последнее условие не выполняется.
Для того, чтобы восстановленная функция в среднем была достаточно похожа на истинную, характерные изменения последней не должны быть резче функции ![]() из (6.2). Это условие и отмеченные особенности, возникающие в искажений позволяют в каждой рассматриваемой точке
из (6.2). Это условие и отмеченные особенности, возникающие в искажений позволяют в каждой рассматриваемой точке ![]() подобрать подходящую аппроксимацию функции
подобрать подходящую аппроксимацию функции ![]() и провести необходимые расчеты по (6.4).
и провести необходимые расчеты по (6.4).
Пример 3
Рассчитаем значения ![]() в двух точках. Пусть в точке
в двух точках. Пусть в точке ![]() функция имеет локальный максимум. Не нарушая общности, положим
функция имеет локальный максимум. Не нарушая общности, положим ![]() . Разложим
. Разложим ![]() в окрестности этой точки в ряд Тейлора и ограничимся членами до вторых степеней включительно. Предположим, что
в окрестности этой точки в ряд Тейлора и ограничимся членами до вторых степеней включительно. Предположим, что
 ,
,
 .
.
При этих условиях
 . (6.5)
. (6.5)
Подставим (6.5) в (6.3) для точки ![]() получаем
получаем
 . (6.6)
. (6.6)
Выражение (6.6) показывает, что в точке, где находится максимум ![]() , восстанавливается значение, которое в среднем меньше истинного, и это уменьшение тем больше, чем больше значение регуляризирующего параметра
, восстанавливается значение, которое в среднем меньше истинного, и это уменьшение тем больше, чем больше значение регуляризирующего параметра ![]() .
.
Теперь проанализируем, как изменяется значение ![]() , когда точка
, когда точка ![]() принадлежит границе, т. е. линии, с разных сторон которой функция принимает разные значения. Пусть в пределах области с линейным размером граница совпадает с осью
принадлежит границе, т. е. линии, с разных сторон которой функция принимает разные значения. Пусть в пределах области с линейным размером граница совпадает с осью ![]() и
и ![]() при
при ![]() , а
, а ![]() при
при ![]() . Тогда по формуле (6.4) находим
. Тогда по формуле (6.4) находим
![]() . (6.7)
. (6.7)
Подставляя (6.6) и (6.7) в (6.2), соответственно получаем
 , (6.8)
, (6.8)
![]() . (6.9)
. (6.9)
Сначала проанализируем изменение величины  для точки, в которой
для точки, в которой ![]() достигает локального максимума. Дифференцируя по
достигает локального максимума. Дифференцируя по ![]() сумму двух слагаемых (6.1) и (6.2) при
сумму двух слагаемых (6.1) и (6.2) при ![]() и
и ![]() , получаем уравнение для определения оптимального значения
, получаем уравнение для определения оптимального значения
 (6.10)
(6.10)
Подставляя в (6.10) величины ![]() и
и ![]() из примеров 1 и 2 и вводя нормированную величину
из примеров 1 и 2 и вводя нормированную величину  , имеем
, имеем
![]() , (6.11)
, (6.11)
где ![]()
 , а
, а 
Для белого шума (![]() ) и
) и ![]() , (6.11) принимает вид
, (6.11) принимает вид
![]() (6.12)
(6.12)
где ![]()
Аналогично можно найти оптимальное значение параметра регуляризации ![]() по отношению к граничной точке. Тогда вместо (6.10) приходим к уравнению вида
по отношению к граничной точке. Тогда вместо (6.10) приходим к уравнению вида
 (6.13)
(6.13)
которое позволяет найти явное выражение для ![]()
![]() (6.14)
(6.14)
Нормируем ![]() на величину
на величину ![]()
 (6.15)
(6.15)
В (6.15) ![]() , где
, где ![]() - приращение значения функции
- приращение значения функции  при смещении от граничной точки на расстояние
при смещении от граничной точки на расстояние ![]() .
.
Зная ![]() и
и ![]() , можно рассчитать среднеквадратические отклонения . Пусть
, можно рассчитать среднеквадратические отклонения . Пусть  - величина для точки, в которой
- величина для точки, в которой ![]() имеет локальный максимум, а
имеет локальный максимум, а ![]() для граничной точки. В соответствии с (6.1), (6.2), (6.8), (6.9) имеем
для граничной точки. В соответствии с (6.1), (6.2), (6.8), (6.9) имеем
 (6.15)
(6.15)

 (6.16)
(6.16)
Подставим в (6.15), (6.16) ![]() и получим
и получим ![]() , а
, а ![]() . Таким образом, большее искажение проявляется в точке локального максимума. Поэтому, если с точки зрения передачи информации важно одинаково хорошо восстановить функцию в граничных точках и точках локального максимума, то целесообразно выбирать параметр регуляризации
. Таким образом, большее искажение проявляется в точке локального максимума. Поэтому, если с точки зрения передачи информации важно одинаково хорошо восстановить функцию в граничных точках и точках локального максимума, то целесообразно выбирать параметр регуляризации ![]() исходя из минимизации
исходя из минимизации ![]() в точке локального максимума. При данных параметрах задачи он равен
в точке локального максимума. При данных параметрах задачи он равен  . При таком значении
. При таком значении ![]() в граничной точке увеличивается по сравнению с
в граничной точке увеличивается по сравнению с ![]() . Подставляя в первое равенство (6.16), вместо
. Подставляя в первое равенство (6.16), вместо ![]() значение , получаем
значение , получаем  . Эта величина несущественно отличается от минимального значения
. Эта величина несущественно отличается от минимального значения  . Если с точки зрения информационного содержания важной является граничная точка, то следовало бы выбрать в качестве параметра регуляризации
. Если с точки зрения информационного содержания важной является граничная точка, то следовало бы выбрать в качестве параметра регуляризации  , которое для данных
, которое для данных ![]() равно 0.42. Подставляя это значение
равно 0.42. Подставляя это значение ![]() вместо
вместо ![]() в (6.15), находим
в (6.15), находим ![]() , что более чем в полтора раза больше минимального значения
, что более чем в полтора раза больше минимального значения ![]() .
.
Подведем итоги рассмотрения раздела 6:
1.Выполняется предварительный анализ типичных для решаемой задачи изображения. В процессе анализа должны быть выбраны фрагменты, которые необходимо передать с максимальной точностью.
2. Для точек этих фрагментов должны быть рассчитаны значения ![]() и найдены величины
и найдены величины ![]() . При этом в своеобразных «смотринах», проводимых по изложенной выше методике, могут принимать участие не пара точек (как это делалось разделе 6), а все те, которые для данного изображения представляют интерес.
. При этом в своеобразных «смотринах», проводимых по изложенной выше методике, могут принимать участие не пара точек (как это делалось разделе 6), а все те, которые для данного изображения представляют интерес.
ЛИТЕРАТУРА
1. Боровков, статистика [Текст]: монография / . - М.: Наука, 1984. – 472 с.
2. Борн, М. Основы оптики: Пер. с англ. [Текст]: монография / М. Борн, Э. Вольф. - М.: Наука, 1973. – 720 с.
3. Троицкий, теория томографии [Текст]: монография / . – М.: Радио и связь, 19с.
4. Карпинский, указания к разделу «Традиционные методы вычислительной томографии» спецкурса «Применение томографических методов в медицинской диагностике» для студентов специальности «Прикладная математика», ЮФУ, 2007.
