

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
А. Б.
1− доильный стакан; 2 − коллектор; 3 − пульсатор; 4− шланги; 5 − пневмодвигатель;
6 − клапан; 7− пневмодатчик; 8 − гибкая нить.
Рисунок 17 − Переносной доильный аппарат с манипулятором: А− принципиальная схема,
Б− общий вид
Решающим условием при проектировании механизма снятия доильных стаканов с вымени и их выводе из-под коровы является исключение удара подвесной части аппарата о пол стойла.
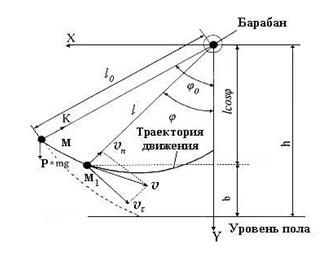 Рассмотрим процесс в плоскости движения подвесной части доильного аппарата при ее выводе из-под животного после отключения вакуума (рис. 18). На подвесную часть действуют две силы: сила тяжести доильного аппарата
Рассмотрим процесс в плоскости движения подвесной части доильного аппарата при ее выводе из-под животного после отключения вакуума (рис. 18). На подвесную часть действуют две силы: сила тяжести доильного аппарата ![]() и сила натяжения нити К. Под действием этих сил Р подвесная часть доильного аппарата движется по дуге. При этом обеспечивается уменьшение длины подвеса за счет вращения барабана пневмодвигателя. Для простоты решения задачи будем считать подвесную часть доильного аппарата как материальную точку с массой m. Рисунок 18 − Траектории движения подвесной Пусть l0 − начальная длина нити подвеса в
и сила натяжения нити К. Под действием этих сил Р подвесная часть доильного аппарата движется по дуге. При этом обеспечивается уменьшение длины подвеса за счет вращения барабана пневмодвигателя. Для простоты решения задачи будем считать подвесную часть доильного аппарата как материальную точку с массой m. Рисунок 18 − Траектории движения подвесной Пусть l0 − начальная длина нити подвеса в
части аппарата при выводе из-под животного в точке М. Угол отклонения подвесной
части доильного аппарата от вертикали в начальный момент времени примем равным φ0.
Для определения закона движения воспользуемся уравнением Лагранжа.
 (44)
(44)
где L – функция Лагранжа, равная (Т–U), Дж; T – кинетическая энергия, Дж; U – силовая функция, Дж; φ – угол отклонения подвесной части доильного аппарата от вертикали, рад.
Рассмотрим движение подвесной части доильного аппарата в момент t, когда она находится в некоторой точке . Скорость ϑ движения доильного аппарата раскладывается на нормальную составляющую ![]() , направленную по нити подвеса и перпендикулярную ей . Длина нити подвеса в точке составляет l.
, направленную по нити подвеса и перпендикулярную ей . Длина нити подвеса в точке составляет l.
Кинетическая энергия материальной точки:
 (45)
(45)
Доильный аппарат движется под действием силы тяжести Р, а сила К –реакция связи. Значит, силовой функцией будет потенциальная энергия. Если принять в точке подвеса потенциальная энергия U=0, тогда на высоте 
![]() (46)
(46)
Уравнение (44) с учетом выражений (45) и (46), после соответствующих
преобразований примет вид:
![]() (47)
(47)
Решение уравнения (47) в аналитическом виде весьма затруднительно. Допустим, что при уменьшении угла j длина l нити укорачивается таким образом, что доильный аппарат движется параллельно полу стойла на расстоянии b от него. Следовательно, длина нити будет
![]() (48)
(48)
где h – высота установки пневмодвигателя над полом стойла, м.
Продифференцировав выражение (48) и подставив результат и значение l в уравнение (53), имеем:
![]() (49)
(49)
Будем решать уравнение (49) с начальными условиями: 
 , при этом введя обозначение
, при этом введя обозначение ![]() .
.
Оно приводится к виду
 (50)
(50)
Откуда закон изменения угла поворота гибкой нити подвеса доильного аппарата в функции времени:
 (51)
(51)
Гибкая нить с уменьшением угла j укорачивается из-за наматывания на ба-
рабан пневмодвигателя. Формула для минимальной угловой скорости барабана:
 (52)
(52)
Время вывода подвесной части доильного аппарата из-под коровы при снятии по завершению доения
 (53)
(53)
Необходимая угловая скорость вращения барабана пневмодвигателя, при которой реализуется процесс безударного о пол стойла снятия с вымени и вывода из-под коровы подвесной части доильного аппарата определяется по формуле (52), а продолжительность этого процесса − по выражению (53).
Отключение доильного аппарата от вакуума при его снятии с вымени животного осуществляется либо через пружинно-рычажный механизм (рис. 19), либо через клапан впуска воздуха коллектора (рис. 20).
 По первому варианту для закрытия клапана 1 необходимо преодолеть усилие пружины 3. При этом соединение рычага со стержнем клапана скользящее. Конец рычага 4 взаимодействует с клапаном только при его опускании. Подъем клапана производится вручную вверх самостоятельно. В верхнем положении удерживается клапан за счет вакуума (сила
По первому варианту для закрытия клапана 1 необходимо преодолеть усилие пружины 3. При этом соединение рычага со стержнем клапана скользящее. Конец рычага 4 взаимодействует с клапаном только при его опускании. Подъем клапана производится вручную вверх самостоятельно. В верхнем положении удерживается клапан за счет вакуума (сила ![]() ). Усилие пружины 3 подбирается так, чтобы перед закрытием клапана выбрать свободное провисание нити и перевести подвесную часть доильного аппарата при выводе из-под животного в горизонтальное положение, исключающее ее удар о пол. Дальнейшее наматывание нити на барабан пневмодвигателя приведет к преодолению усилия пружины 3 и через рычажный механизм 4 к закрытию клапана 1 коллектора, и стаканы спадут с сосков.
). Усилие пружины 3 подбирается так, чтобы перед закрытием клапана выбрать свободное провисание нити и перевести подвесную часть доильного аппарата при выводе из-под животного в горизонтальное положение, исключающее ее удар о пол. Дальнейшее наматывание нити на барабан пневмодвигателя приведет к преодолению усилия пружины 3 и через рычажный механизм 4 к закрытию клапана 1 коллектора, и стаканы спадут с сосков.
1 - клапан отключения вакуума, 2- шайба, 1 – корпус коллектора; 2 – распределитель;
3- пружина, 4- рычаги, 5- гибкая нить. 3 – клапан впуска воздуха; 4 – клапан отклю -
Рисунок 19 − Схема к расчету рычажной чения вакуума; 5 – пружина; 6 – нить
системы коллектора Рисунок 20 − Схема к расчету клапанного
механизма коллектора
Если рассматривать подвесную часть доильного аппарата как материальную
точку, то сила Т, необходимая для начала ее подъема найдется как:
![]() (54)
(54)
где Ту – вертикальная составляющая силы Т, Н; m – масса подвесной части доильного аппарата, кг; – угол первоначального отклонения нити от вертикали.
Активные силы, действующие на систему (рис. 19): сила от вакуума на клапане ![]() ; сила тяжести клапана
; сила тяжести клапана ![]() (
(![]() – масса клапана); сила упругости пружины
– масса клапана); сила упругости пружины ![]() ; движущая сила пневмодвигателя
; движущая сила пневмодвигателя ![]() . Приняв реакции связей за идеальные и применив для нахождения необходимой силы упругости пружины коллектора принцип возможных перемещений находим
. Приняв реакции связей за идеальные и применив для нахождения необходимой силы упругости пружины коллектора принцип возможных перемещений находим
![]()
![]()
![]()
![]() (55)
(55)
где r1, r2 – длины плеч рычага относительно оси вращения, м.
При создании предварительного натяжения пружины коэффициент жесткости определяется по выражению
 (56)
(56)
где ![]() ,
, ![]() – соответственно начальное и конечное усилие пружины, Н;
– соответственно начальное и конечное усилие пружины, Н; ![]() –
–
ход пружины, м.
Другая модификация коллектора наиболее проста и предусматривает безрычажное выключение клапана (рис. 20). При выводе подвесной части аппарата из-под животного усилие от нити 6 пневмодвигателя передается на стержень клапана 3, дальнейшее перемещение нити 6 вызывает сжатие пружины 5. Клапан 3 отрывается от верхнего торца коллектора, соединяя молочную камеру с атмосферой. Струя воздуха попадает в молочную камеру, что приводит к закрытию клапана 4 и к спаданию стаканов с сосков, и подвесная часть аппарата выводится из-под коровы.
На клапан 3 коллектора действуют сила от перепада давлений Fк1; сила упругости пружины ![]() ; суммарная сила тяжести клапана и коллектора Gк и сила ре-
; суммарная сила тяжести клапана и коллектора Gк и сила ре-
акции опоры клапана ![]() .
.
Рассмотрев равновесия системы и составив уравнение на ось Y, получаем:
 (57)
(57)
Сила ![]() должна быть меньше движущей силы
должна быть меньше движущей силы ![]() . Ход клапана h принимается по конструктивным соображениям. Геометрические параметры пружины определяются по стандартным расчетам для цилиндрических пружин сжатия.
. Ход клапана h принимается по конструктивным соображениям. Геометрические параметры пружины определяются по стандартным расчетам для цилиндрических пружин сжатия.
Расход воздуха ![]() , необходимый на привод пневмодвигателя определяется по зависимости для ротационных пневматических машин:
, необходимый на привод пневмодвигателя определяется по зависимости для ротационных пневматических машин:
 (58)
(58)
где Ψ – поправочный коэффициент учитывающий утечки воздуха; p1 – безразмерная величина, характеризующая перепад давлений действующих на лопатку,  ; l – длина ротора, м; S – площадь сечения между соседними лопатками в момент отсечки, м²; z – число лопаток пневмодвигателя; n– частота вращения
; l – длина ротора, м; S – площадь сечения между соседними лопатками в момент отсечки, м²; z – число лопаток пневмодвигателя; n– частота вращения
ротора, об/с; pб– барометрическое давление окружающей среды, Па.
Площадь, заключенная между криволинейными лопатками в момент отсечки
воздуха (при перекрытии впускного и выпускного окон), обозначена буквами ACDEFB (рис. 21).
А. Б.
α, β – углы, определяющие положение лопаток и ротора в момент отсечки воздуха;
r – радиус ротора; R – внутренний радиус роторной камеры; е – эксцентриситет
Рисунок 21 – Расчетная схема пневмодвигателя: А – общий вид сечения; Б – расчетная схема (повернуто)
Площадь фигуры АВFEDC составит:
![]() (59)
(59)
где ![]() ,
,![]() ,
,![]() –соответственно площади фигур ABC, DFE и BCDF.
–соответственно площади фигур ABC, DFE и BCDF.
Площадь криволинейной фигуры![]() :
:
![]()

![]()
![]()
 (60)
(60)
Определения угла α отсечки подачи воздуха в роторную камеру осуществляют из формул:
![]() ,
,  (61)
(61)
Площадь фигуры S2 определяется по выражению:
![]()

![]()
 (62)
(62)
Определение угла β начала выпуска воздуха из роторной камеры осуществляют из формул:
![]() ;
;![]() (63)
(63)
Площадь фигуры S3 определяем по формуле:
![]()
![]()
![]()
![]() (64)
(64)
Потребная мощность на барабане пневмодвигателя зависит от массы подвесной части доильного аппарата и скорости ее подъема, для обеспечения условия безударного о пол стойла снятия:
 (65)
(65)
В четвертом разделе «Методика экспериментальных исследований» представлены общие типовые и частные методики, применяемые в экспериментальных исследованиях, приведены описания лабораторных установок.
В пятом разделе «Результаты лабораторных исследований» представлены результаты исследований. Обработка полученных данных производилась с помощью ПЭВМ. Экспериментальные исследования проводились в лаборатории кафедры «Механизация животноводства
» и в виварии ФГОУ ВПО «Рязанская государственная сельскохозяйственная академия имени профессора ».
Установлено, что значения модуля упругости Е и коэффициента поперечной деформации µ изменяются в широком диапазоне. Для сосков вымени с первоначальным диаметром 24…26 мм и длиной 55…65 мм значения модуля упругости Е находятся в пределах (18,5…51,0) · 10-3 МПа, а коэффициента поперечной деформации µ соответственно в пределах 0,17…0,50. Коэффициенты трения f не зависят от усилия прижатия (в биологически допустимом пределе) сосковой резины к телу соска, и находятся для сухих поверхностей сосок вымени – сосковая резина в пределах 0,19…0,23, а для мокрых – соответственно 0,21…0,24.
Экспериментальные исследования доильного аппарата с управляемой
стимуляцией
В программу исследований входило определение отсасывающих способностей аппаратов ДАУС и АДУ-1-04, времени работы стимулирующего пульсатора и выявление оптимальных конструкторско-режимных параметров отключающего устройства для требуемой продолжительности стимуляции рефлекса молокоотдачи.
Из рисунка 22 видно, что при работе ДАУС с включенным стимулирующим пульсатором его отсасывающая способность практически такая же, что и у аппарата АДУ-1-04. При отключении стимулирующего пульсатора ДАУС отсасывающая способность на 10…12 % выше. Это объясняется тем, что переходный режим у пульсатора короче. Кроме того, сосковая резина при такте сосания у АДУ-1-04 полусжата, что оказывает дополнительное сопротивление прохождению жидкости при интенсивной молокоотдаче, а у экспериментального аппарата при такте
 сосания резина полностью раскры-та. Для выявления зависимости времени работы стимулирующего пульсатора от интенсивности отса-сывающей способности и диаметра жиклера в ковше отключающего устройства был проведен двух-факторный эксперимент.
сосания резина полностью раскры-та. Для выявления зависимости времени работы стимулирующего пульсатора от интенсивности отса-сывающей способности и диаметра жиклера в ковше отключающего устройства был проведен двух-факторный эксперимент.
В результате проведенного ста -
тистического анализа эксперимен-
тальных данных c использованием
А – работа ДАУС со стимулирующим пульсатором; программы на языке Бейсик была
Б – ДАУС с отключенным стимулирующим пульсатором; получена адекватная математи -
Рисунок 22 – Графическая зависимость отсасывающей ческая модель зависимости вре-
способности Q от диаметра d отверстий в имитаторах сосков мени работы стимулирующего
пульсатора (t, c) от отсасывающей способности (Q, кг/мин) и диаметра отверстия жиклера (d, мм) в ковше:
 (66)
(66)
Графическая интерпретация выражения (69) представлена на рисунке 23. Анализ полученных результатов показывает, что при отсасывающей способности ДАУС в диапазоне от 0,26 до 0,90 кг/мин и диаметрах отверстий жиклера ковша 7, 8 и 9 мм стимулирующий пульсатор будет работать соответственно 21...26; 25...30 и 33...42 с . При уменьшении диаметра отверстия жиклера в ковше и увеличении отсасывающей способности до-ильного аппарата время работы стимули - рующего пульсатора уменьшается. Исходя
. При уменьшении диаметра отверстия жиклера в ковше и увеличении отсасывающей способности до-ильного аппарата время работы стимули - рующего пульсатора уменьшается. Исходя
Рисунок 23 – Зависимости времени работы из того, что латентный период у коровы стимулирующего пульсатора длится около 60 с, а на ручные подготови-
тельные операции затрачивается в среднем 30…35 с, то стимулирующий пульсатор должен работать в течение 25...30 с в начале доения. Тогда для работы ДАУС в производственных условиях следует устанавливать в ковш жиклер с диаметром отверстия 8 мм.
Экспериментальные исследования доильного аппарата с изменяющейся нагрузкой на четверти вымени
В ходе лабораторных исследований были получены графические зависимости времени движения поршня в пределах рабочей длины цилиндра (l=0,14м) (рис. 24) и угла отклонения подвесной части доильного аппарата от вертикали (рис. 25).
Анализ полученных результатов показал, что время движения поршня в цилиндре коллектора в пределах рабочей длины зависит от величины вакуума и массы поршня. С уменьшением массы поршня и увеличением вакуума, время движения уменьшается. Угол отклонения подвесной части от вертикали при постоянной массе корпуса коллектора зависит от массы поршня, величины вакуума и длины молочных патрубков стаканов. При вакууме 42…54 кПа и массе поршня
 0,5…1,0 кг угол отклонения подвесной части изменяется от 2,2º до 12,7º град.
0,5…1,0 кг угол отклонения подвесной части изменяется от 2,2º до 12,7º град.
Рисунок 24 – Графическая зависимость Рисунок 25 – Графическая зависимость
времени движения поршня в цилиндре t угла отклонения φ от величины вакуума Рв
от вакуумметрического давления Рв.
Для определения совместного влияния вакуума Рв, массы поршня m и массы стакана (с учетом постоянной массы корпуса коллектора, приходящейся на стакан) Мс доильного аппарата с изменяющейся нагрузкой на четверти вымени на величину наползания был проведен 3-х факторный эксперимент. В результате обработки экспериментальных данных, произведенной на ПЭВМ в компьютерной программе «Mathematika 4.2» была получена адекватная математическая модель зависимости величины наползания Н от принятых факторов.

(67)
Из зависимости следует, к уменьшению наползания доильного аппарата на вымя коровы приводит увеличение масс поршня (m) коллектора и доильного стакана (Mc ) с учетом постоянной массы корпуса коллектора, приходящейся на стакан и снижение вакуумметрического давления (P).
 В результате пошаговой обработки данных установлено, что оптимально-рациональными значениями пара-метров доильного аппарата с из-меняющейся нагрузкой на четвер -
В результате пошаговой обработки данных установлено, что оптимально-рациональными значениями пара-метров доильного аппарата с из-меняющейся нагрузкой на четвер -
ти при вакууме 48 кПа: масса поршня 850 г, масса стакана с учетом постоянной массы коллектора, приходящейся на стакан 480 г.
По результатам проведения сравнительных испытаний (рис. 26) доильных аппаратов АДУ-1-01,
Рисунок 26 – Результаты сравнительных «Дояр» и экспериментального вид - испытаний доильных аппаратов но, что доильный аппарат с изменя-
ющейся нагрузкой на четверти коровы предотвращает наползание доильных стаканов намного эффективнее, чем серийно выпускаемые. Так, например, наползание стаканов при вакууме 48 кПа составило АДУ-1 – 32 мм, «Дояр» – 29 мм, лабораторный – 7 мм.
Для проверки сходимости результатов исследований в диссертации представлены теоретические и экспериментальные зависимости, расхождение которых в среднем не превышает 5 %.
Результаты исследований доильного аппарата с манипулятором
В программу исследований входило определение влияния конструктивно-технологических параметров пневмодвигателя на мощность на барабане и расход воздуха; определение скорости перемещения нити и жесткости пружины коллектора для обеспечения безударного снятия подвесной части доильного аппарата; определение оптимальных параметров доильного аппарата. Эксперименты проводились на лабораторной установке “искусственное вымя”. Испытывалось несколько лабораторных образцов пневмодвигателя манипулятора. В итоге был принят пневмодвигатель с внутренним диаметром роторной камеры 58 мм и длиной 60 мм и диаметром
ротора 45 мм. Барабан соединен с валом пневмодвигателя через редуктор с переда-
точным отношением 1: 8.
Зависимости расхода воздуха и развиваемой мощности N на барабане пневмодвигателя от величины вакуума при подъеме подвесной части доильного аппа-
рата, массой m = 3,4 кг представлены на рисунке 27. При увеличении величины разряжения Р в вакуумпроводе с 30 до 60 кПа происходит рост значения расходуемого воздуха Q пневмодвигателем c 0,88∙10-3 до 2,33∙10-3 м³/с. Характер приведенных зависимостей остается неизменным при различных диаметрах барабанов и внутренних диаметрах выпускных патрубков. При изменении величины вакуума Р с 30 до 60 кПа также происходит увеличение мощности N c 0,25 до 8,95 Вт, это объясняется ростом перепада давлений действующих на лопатку в роторной камере, что приводит к повышению крутящего момента на барабане пневмодвигателя. При постоянном параметре вакуумметрического давления Р с увеличением диаметра барабана D с 12 до 36 мм значение мощности N возрастает с 2,94 до 7,34 Вт, так как увеличивается скорость подъема доильного аппарата при незначительном падении частоты вращения барабана. При диаметрах барабана D от 12 до 16 мм наблюдались удары доильного аппарата о пол стойла при автоматическом снятии с искусственного вымени, с увеличением рабочего диаметра барабана D более 16 мм осуществлялось безударное снятия доильного аппарата. Для реализации данного процесса минимально необходимая мощность ![]() . Увеличение диаметра барабана более значения 36 мм нецелесообразно, так как это приведет к увеличению массы и габаритных размеров пневмодвигателя, что является нежелательным при использовании его в составе переносного манипулятора доения. С увеличением диаметра барабана D с 12 до 36 мм, происходит рост величины расходуемого воздуха Q пневмодвигателем c 1,78∙10-3 до 2,1∙10-3 м³/с. Это объясняется тем, что происходит увеличение момента при подъеме подвесной части доильного аппарата и приводит к большему расходу Q из-за утечек воздуха в роторной камере.
. Увеличение диаметра барабана более значения 36 мм нецелесообразно, так как это приведет к увеличению массы и габаритных размеров пневмодвигателя, что является нежелательным при использовании его в составе переносного манипулятора доения. С увеличением диаметра барабана D с 12 до 36 мм, происходит рост величины расходуемого воздуха Q пневмодвигателем c 1,78∙10-3 до 2,1∙10-3 м³/с. Это объясняется тем, что происходит увеличение момента при подъеме подвесной части доильного аппарата и приводит к большему расходу Q из-за утечек воздуха в роторной камере.
А. Б.
Рисунок 27 – Графическая зависимость расхода воздуха Q (А) и мощности N пневмодвигателя (Б) от величины вакуума P: 1 - при диаметре барабана D = 16 мм, и внутреннем диаметре патрубка d = 3 мм; 2- при D = 16 мм и d = 6 мм; 3 - при D = 26 мм и d = 3 мм; 4 -
при D = 16 мм и d = 9 мм; 5 - при D = 36 мм и d = 3 мм; 6- при D = 26 мм и d = 6 мм; 7- при D = 26 мм и d = 9 мм; 8 - при D = 36 мм и d =6 мм; 9- при D = 36 мм и d = 9 мм
 Зависимость расхода воз-духа Q, изменения мощности
Зависимость расхода воз-духа Q, изменения мощности
N и массы m поднимаемого груза от размера внутреннего
диаметра патрубка d при подъ -
еме подвесной части доиль-
ного аппарата массой m=3,4 кг,
величине вакуума Р=50 кПа и диаметре барабана D=16 мм
представлены на рисунке 28.
При увеличении внутреннего
диаметра выпускного патрубка
Рисунок 28 – Зависимость расхода воздуха Q (1); d c 3 до 9 мм происходит увели-
мощности на барабане пневмодвигателя N (2) и чение расхода воздуха Q пнев - массы m (3) поднимаемого груза от внутреннего модвигателя с 1,33∙10-3 до
диаметра выпускного патрубка d 1,9∙10-3 м³/с и мощности N на
барабане пневмодвигателя с 0,8 до 4,1 Вт. Это объясняется повышением скорости движения воздуха и частоты вращения ротора. Масса m поднимаемого груза увеличивается с 1,49 до 9,14 кг.
Зависимость частоты вращения n барабана пневмодвигателя от величины вакуума P при подъеме подвесной части доильного аппарата массой m=3,4 кг и диаметрах барабана D=16 мм, выпускного патрубка d=6 мм показана на рисунке 29. Работоспособность пневмодвигателя возможна при минимально допустимой
 частоте вращения барабана пневмо-
частоте вращения барабана пневмо-
двигателя равной nmin= 60 об/мин, при ее дальнейшем снижении происходит остановка ротора пневмодвигателя. С увеличением величины вакуума с 42 до 60 кПа частота вращения барабана пневмо-двигателя увеличивается с 60 до 146 об/мин. При увеличении диаметра
барабана D с 12 до 36 мм скорость
подъема подвесной части доильного
аппарата возрастает с 0,09 до 0,2
Рисунок 29 – Зависимость частоты вращения м/с. Безударное снятие доильного
от величины вакуума аппарата о пол наблюдалось при
скорости движения нити υ≥0,11 м/с. В результате проведенного многофакторного эксперимента и статистического анализа опытных данных c использованием программы на языке GW BASIC был получены математическая модель зависимости величины расхода воздуха Q(м3/с) пневмодвигателем от величины вакуумметрического давления в вакуумпроводе Р(кПа), диаметра поверхности барабана D(мм) и внутреннего диаметра выпускного патрубка d(мм):
 (68)
(68)
и математическая модель зависимости развиваемой мощности на барабане пневмодвигателя N(Вт) от величины давления в вакуумпроводе Р(кПа), диаметра барабана D(мм) и внутреннего диаметра выпускного патрубка d(мм):
 (69)
(69)
В результате пошаговой обработки данных установлено, что оптимально-рациональными значениями параметров для пневмодвигателя являются: величина разряжения в вакуумпроводе Р=48 кПа, диаметр барабана D = 22 мм, внутренний диаметр выпускного патрубка d =7 мм. При этом достигаются развиваемая мощность на барабане пневмодвигателя N=4,1 Вт, расход воздуха Q =1,8∙10-3 м³/с (6,5 м³/ч), частота вращения n=105 об/мин, а скорость движения нити с подвесной частью доильного аппарата υ= 0,12 м/с.
В шестом разделе «Производственные испытания и экономическая эффективность разработанной технологии и технических средств доения» изложена программа, методика и результаты производственных испытаний разработанных доильных аппаратов и усовершенствованной технологии доения коров, определена экономическая эффективность.
Производственные сравнительные испытания доильных аппаратов на группах коров-аналогов проводились на молочном комплексе учхоза "Стенькино" Рязанской ГСХА в 1998…2006 гг. В целом результаты сравнительных испытаний показали, что разработанные технические средства доения работоспособны и эффективны.
Так при увеличении средней интенсивности молоковыведения на 9,48% у доильного аппарата с управляемой стимуляцией, по сравнению с АДУ-1-04 время машинного доения сократилась на 8,55 %, а продуктивность коров выше на 1,26 %, что говорит о более адекватной стимуляции рефлекса молокоотдачи. В основной период испытаний количество остаточного молока у коров опытной группы уменьшилось на 9,28%, а содержание жира в молоке увеличилось на 0,06 % по сравнению с контрольной.
Применение доильного аппарата с изменяющей нагрузкой на вымя показало, что он в отличие от АДУ-1 не наползает на соски вымени, и животное выдаивается полностью без машинного додаивания, на которое у серийно выпускаемого аппарата затрачивается до 80 с. Общая продолжительность доения у экспериментального аппарата меньше, чем у серийного на 8,47%. Интенсивность молоковыведения у экспериментального доильного аппарата выше, чем у серийного на 11,21% за счет более высокой отсасывающей способности в период интенсивного припуска молока. При этом покачивание подвесной части аппарата вызывает стимулирующее воздействие. Это способствует беспрепятственному и быстрому отводу молока из вымени. Продуктивность коров опытной группы по сравнению с контрольной выше на 4%.
Производственные испытания пневмодвигателя в качестве исполнительного
механизма манипулятора оказали его эффективность. Оптимальная частота вращения барабана пневмодвигателя при снятии с вымени и выводе из-под коровы доильного аппарата находится в пределах 100…110 мин-1, что обеспечивает скорость движения гибкой нити подвеса 0,11…0,12 м/с при длительности процесса около 6…8 с и расходе воздуха за одно снятие – 0,015…0,017 м³.
Испытание усовершенствованной технологии доения коров в
производственных условиях
Манипулятор доения и аппарат с изменяющейся нагрузкой на четверти вымени использовались для производственной проверки усовершенствованной технологии доения. Проверка технологии в производственных условиях проводилась в двух хозяйствах Рязанской области.
Для испытаний использовались по две группы коров до 50 голов, учет вели по 35 животным в группах. Коров доили в молокопровод, доярка в контрольной группе работала одновременно с тремя доильными аппаратами АДУ-1, а в опытных группах – с четырьмя разработанными.
Результаты производственной проверки технологий представлены в таблице.
Производительность дояра по предлагаемой технологии доения более 29 гол/час, что на 33% выше, чем при стандартной, продолжительность дойки стада сократилось на 25%, при снижении общих затрат труда на доение коровы на 24,4 %. Существенно важно, за счет стимулирующего адекватного действия доильного аппарата с изменяющейся нагрузкой на четверти вымени, продуктивность коров повысилась на 3,85 %. Проверка степени опорожнения вымени после автоматического снятия доильного аппарата путем ручного додоя показала, коровы отдают молоко полностью. Случаев заболевания маститом у коров при испытании технологии на основе манипулятора доения в опытной группе не наблюдалось, а в контрольной группе их было три. Производительность доильного аппарата с манипулятором практически равна доильному аппарату с изменяющейся нагрузкой на четверти вымени без манипулятора. Главное его достоинство в том, что он исключает передержки доильных стаканов на сосках вымени выдоившейся коровы.
Таблица − Результаты производственной проверки технологий доения
Показатели | Стандартная технология доения | Новая технология доения | Разница, % |
Количество коров в группе, гол | 35 | 35 | - |
Продолжительность дойки, ч | 1,59 | 1,19 | -25,16 |
Разовый средний удой на корову, кг | 4,88 | 5,07 | +3,85 |
Общая продолжительность доения коровы, мин | 6,24 | 5,72 | -8,3 |
Производительность дояра, гол/ч | 22,0 | 29,4 | -33,6 |
Затраты труда на доение чел.- ч/гол | 0,045 | 0,034 | -24,4 |
Результаты расчета экономической эффективности показывают, что применение рациональной технологии доения коров позволяет получить годовой экономический эффект в размере 289429 рублей при использовании доильного аппарата с изменяющейся нагрузкой на четверти вымени с манипулятором доения и 315089 рубля без манипулятора доения на стаде 200 коров и сокращения затрат ручного труда 21,5%. При определении экономической эффективности не учитывался положительный эффект от снижения заболеваний молочной железы коров.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
