


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
а) в первой строке выписываются все коэффициенты с четными индексами, начиная с а0, во второй - с нечетными, начиная с а1, отсутствующие коэффициенты заменяются нулями;
б) коэффициенты третьей строки вычисляются по следующему алгоритму:
С13= ; С23=
; С23= ; С33=
; С33=
![]() и т. д.
и т. д.
в) коэффициенты четвертой строки определяются по двум предыдущим строкам:
С14= ; С24=
; С24= и т. д.
и т. д.
Таблица Рауса имеет (n+1) строку и целое от ![]() число столбцов.
число столбцов.
не обращаясь в нуль, т. е. согласно принципу аргумента
 . (2)
. (2)
Критерий Найквиста – частотный критерий, позволяющий судить об устойчивости замкнутой системы с единичной обратной связью по виду амплитудно-фазовой характеристики разомкнутой системы.
Первая формулировка критерия: замкнутая система будет устойчива, если амплитудно-фазовая характеристика устойчивой разомкнутой системы не охватывает точку с координатами ![]() , т. е.
, т. е. ![]() .
.
Вторая формулировка критерия: если передаточная функция W(s) разомкнутой системы имеет ![]() правых корней, то для устойчивости замкнутой системы необходимо и достаточно, чтобы АФХ разомкнутой системы при изменении частоты от нуля до бесконечности охватывала точку с координатами (-1,
правых корней, то для устойчивости замкнутой системы необходимо и достаточно, чтобы АФХ разомкнутой системы при изменении частоты от нуля до бесконечности охватывала точку с координатами (-1,![]() ) в положительном направлении (против часовой стрелки)
) в положительном направлении (против часовой стрелки) ![]() раз, т. е.
раз, т. е.![]() .
.
Формулировка критерия для астатических систем: замкнутая система будет устойчива, если АФХ разомкнутой системы, дополненная дугой бесконечного радиуса до положительной вещественной полуоси, если число правых полюсов l передаточной функции W(s) равно нулю или четное, и до отрицательной вещественной полуоси, если l - нечетное число, при изменении частоты w от нуля до бесконечности охватывает точку с координатами ![]() в положительном направлении
в положительном направлении ![]() раз.
раз.
2.2 Показатели качества работы САУ
Устойчивость является необходимым, но недостаточным условием работоспособности линейной САУ. Устойчивость означает, что переходные составляющие процессов затухают. Для практики этого недостаточно. Поэтому возникают определенные требования к времени затухания переходных составляющих, к характеру реакции системы на задающие и возмущающие воздействия, к точности отработки этих воздействий. Все эти стороны работоспособности системы обобщаются в понятии качества процесса управления. Качество процесса управления оценивается рядом показателей.
Существуют два вида установившихся (стационарных) режимов САУ: статический и динамический.
Статический стационарный режим характеризуется тем, что все внешние воздействия и параметры системы не меняются во времени (g(t)=x0=const, ![]() ).
).
Динамический стационарный режим – это режим, при котором приложенные к системе внешние воздействия (g(t), f(t)) изменяются по некоторому установившемуся закону, в результате чего в системе устанавливается режим вынужденного движения. Критерием качества работы в стационарном режиме служат ошибки e(t), вызываемые действием детерминированных задающих g(t) и возмущающих f(t) воздействий.
Ошибки статического и динамического стационарных режимов называют соответственно статическими и динамическими.
Медленно меняющиеся входные воздействия – это такие детерминированные сигналы, которые за время действия весовой функции практически не успевают изменяться.
Вычисление установившейся ошибки (статической и динамической) можно производить либо с использованием теоремы Лапласа о конечном значении оригинала, если входное воздействие g(t) задано явно и является аналитической функцией времени:
![]() , (3)
, (3)
либо используя коэффициенты ошибок, если входное воздействие задано неявно
![]()
![]() , (4)
, (4)
где  – передаточная функция замкнутой системы по ошибке;
– передаточная функция замкнутой системы по ошибке;
G(s) - изображение по Лапласу задающего воздействия g(t);
С0, С1, С2, - коэффициенты ошибок, являющиеся коэффициентами разложения функции Фe(s) в бесконечный степенной ряд
 , (5)
, (5)
где ![]() – максимальные значения скорости и ускорения задающего воздействия g(t).
– максимальные значения скорости и ускорения задающего воздействия g(t).
Статическая ошибка при g(t)=1(t) согласно (1) равна
![]() . (6)
. (6)
Если на систему одновременно действуют и задающее g(t) и возмущающее f(t) воздействия, то статическая ошибка системы определяется как
![]() , (7)
, (7)
где ![]() согласно (6),
согласно (6),
![]() , (8)
, (8)
![]() – передаточная функция замкнутой системы по возмущению, равная
– передаточная функция замкнутой системы по возмущению, равная  . Здесь Wf(s) – передаточная функция участка цепи, заключенного между точкой приложения воздействия f(t) и выходной координатой x(t).
. Здесь Wf(s) – передаточная функция участка цепи, заключенного между точкой приложения воздействия f(t) и выходной координатой x(t).
Все показатели качества можно разделить на прямые и косвенные. Прямые показатели качества определяются непосредственно по кривой переходного процесса h(t). Это:
· ty - время переходного процесса, определяемое с заданной точностью d;
· - величина перерегулирования, определяемая как
· ![]() ;
;
· t1max - время первого максимума;
· eст – статическая ошибка системы, равная ![]() ;
;
· характер переходного процесса.
Косвенные показатели качества подразделяются на частотные, корневые и интегральные.
Частотные показатели (критерии) качества позволяют оценивать качество процесса управления по отображению этого процесса из области времени t в область частоты w. Частотные методы оценки показателей качества систем автоматического регулирования получили широкое распространение в инженерной практике. Математической основой этих методов является обратное преобразование Лапласа (или Фурье), которое однозначно связывает выходной сигнал ![]() и вещественную частотную характеристику замкнутой системы
и вещественную частотную характеристику замкнутой системы ![]() :
:
 (9)
(9)
При этом на входе системы действует ![]() , а начальные условия являются нулевыми.
, а начальные условия являются нулевыми.
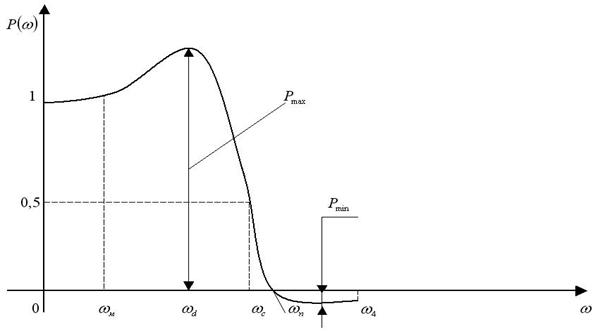
Рисунок 2 – АФЧХ вещественной части
К основным частотным критериям относятся:
а) вид амплитудно-фазовой характеристики W(jw) или ЛАХ L(w) и ЛФХ j(w) разомкнутой системы и характерные частоты (частота среза и т. п.);
б) вид и характерные частоты амплитудно-частотной характеристики замкнутой системы Ф(w);
в) вид и характерные частоты вещественной частотной характеристики Р(w).
Так, если известна зависимость ![]() (рис. 2), то можно определить установившееся значение
(рис. 2), то можно определить установившееся значение ![]() :
:
![]() . (10)
. (10)
Зависимость ![]() и пик вещественной частотной характеристики замкнутой системы связаны следующим соотношение:
и пик вещественной частотной характеристики замкнутой системы связаны следующим соотношение:
![]() . (11)
. (11)
Время переходного процесса ![]() зависит от длин интервала положительности
зависит от длин интервала положительности ![]() :
:
 ,
,
т. е. если ![]() на интервале
на интервале ![]() , то
, то ![]() заведомо больше, чем
заведомо больше, чем ![]() .
.
Для большинства систем, у которых зависимость ![]() имеет вид, показанный на рисунке 2 (
имеет вид, показанный на рисунке 2 (![]() ), показатели качества оценивают по номограммам (рис. 3):
), показатели качества оценивают по номограммам (рис. 3):
![]() ;
;
 .
.
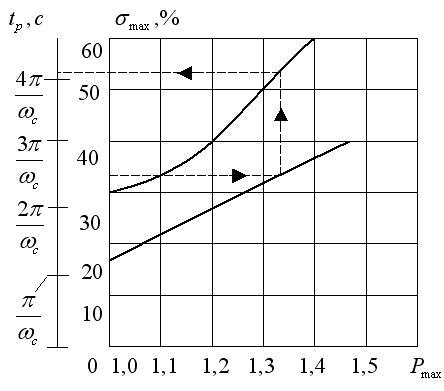
Рисунок 3 – Номограммы
Вычисления в частотной области w обычно проще вычислений во временной области t, поэтому частотные критерия являются весьма эффективным и простым средством оценки качества процессов управления. С другой стороны, можно в некоторых случаях ограничиться только частотными оценками, такими как запасы устойчивости по модулю m и по фазе g, показатель колебательности М и полоса пропускания wп, не уточняя вопроса в области времени t. Так как во многих случаях частотные характеристики замкнутой системы близки к частотным характеристикам колебательного звена с коэффициентом затухания 0,5<x<1, то это позволяет связать показатели переходной функции h(t) системы с ее частотными характеристиками.
Рекомендуемые нормы запасов устойчивости по модулю и фазе для систем с заданными показателями качества. Известно, что ВЧХ замкнутой системы и логарифмические частотные характеристики разомкнутой системы однозначно связаны. Следовательно, для каждой ЛАХ и ЛФХ существуют вполне определённые показатели качества переходного процесса.
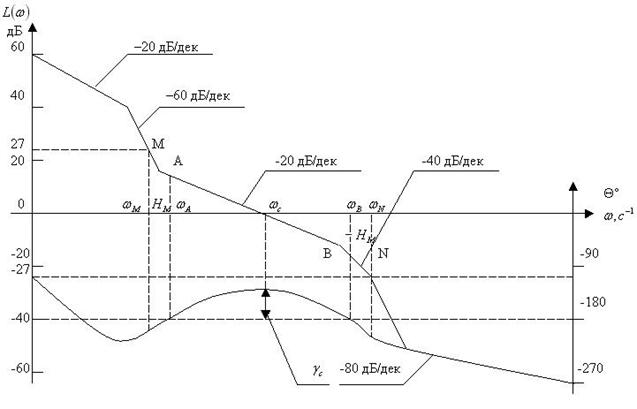
Рисунок 4 – ЛАХ и ЛФХ системы
Интервал частот от ![]() до
до ![]() (рис. 4), определяющий показатели качества системы, называется существенным. Он разделяет ЛАХ на три зоны: низкочастотную
(рис. 4), определяющий показатели качества системы, называется существенным. Он разделяет ЛАХ на три зоны: низкочастотную ![]() , среднечастотную
, среднечастотную ![]() и высокочастотную
и высокочастотную ![]() . Значения граничных частот
. Значения граничных частот ![]() и
и ![]() приближённо определяются выражениями:
приближённо определяются выражениями: ![]()
![]()
Частоты ![]() и
и ![]() соответствуют запасу устойчивости по модулю
соответствуют запасу устойчивости по модулю ![]() и
и  . В таблице 5 представлены нормы запасов устойчивости по модулю и фазе, гарантирующие показатели качества для длительно работающих систем автоматического регулирования.
. В таблице 5 представлены нормы запасов устойчивости по модулю и фазе, гарантирующие показатели качества для длительно работающих систем автоматического регулирования.
При проектировании систем автоматического регулирования необходимо учитывать, что чем выше частота среза ![]() в системе, тем больше вероятность того, что не будут учтены малые постоянные времени объектов регулирования. Чтобы этого не случилось, необходимо увеличивать запасы устойчивости по фазе и модулю с ростом частоты среза. Сказанное отражено в таблице 5.
в системе, тем больше вероятность того, что не будут учтены малые постоянные времени объектов регулирования. Чтобы этого не случилось, необходимо увеличивать запасы устойчивости по фазе и модулю с ростом частоты среза. Сказанное отражено в таблице 5.
Таблица 5 - Нормы запасов устойчивости
Тип системы | Показатели устойчивости для диапазонов частот | |||
От 0,01 до 100 | От 100 до 1000 | От 1000 до 10000 | От 10000 и более | |
Для систем с высокими показателями качества | ||||
| 45 | 50 | 55 | 60 |
HМ, дБ | 16 | 18 | 20 | 22 |
-HМ, дБ | 14 | 16 | 18 | 20 |
Для систем с невысокими показателями качества | ||||
| 30 | 35 | 40 | 45 |
HМ, дБ | 12 | 14 | 16 | 18 |
-HМ, дБ | 10 | 12 | 14 | 16 |
Приведённые нормы запасов устойчивости справедливы как для внутренних контуров, так и для собственно систем автоматического регулирования.
2.3 Синтез САУ при регулярных воздействиях
Сущность задачи синтеза заключается в таком выборе структурной схемы системы и её параметров, а также таком конструктивном решении, при котором обеспечиваются требуемые показатели качества и точности процессов регулирования, а сама система состоит из наиболее простых устройств управления. Всю систему автоматического регулирования можно разделить на две части: объект регулирования, исполнительное устройство, усилитель мощности и измерительное устройство – неизменяемая часть системы, и корректирующее устройство с согласующим усилителем – изменяемая часть системы. В значительной степени определяющими при выборе устройств неизменяемой части системы являются стоимость, надёжность, масса и габаритные размеры. Поэтому задачу синтеза системы автоматического регулирования обычно сводят к выбору лишь легко изменяемых устройств, а именно: усилительных и корректирующих устройств.
Пусть известны тип и параметры устройств, входящих в неизменяемую часть системы. Тогда синтез системы осуществляется в следующем порядке:
1. Составляют упрощённую структурную схему системы и выбирают схему и место включения корректирующих и усилительных устройств.
2. По критерию качества или требованиям на показатели качества и точности регулирования находят желаемую логарифмическую частотную характеристику разомкнутой системы.
3. Определяют тип и параметры корректирующих и усилительных устройств системы.
4. Находят конструктивное решение корректирующих и усилительных устройств системы и составляют окончательную структурную схему системы автоматического регулирования.
5. Определяют динамические характеристики системы и сравнивают их с соответствующими данными технических условий. Очевидно, принятый порядок синтеза может привести к неоднозначному решению задачи.
В САУ применяются корректирующие устройства последовательного или параллельного действия. САУ с последовательной коррекцией имеют большую частоту среза, что предъявляет высокие требования к динамическим характеристикам устройств неизменяемой части и к отсутствию в системе сигналов шумов и помех. Корректирующие устройства последовательного действия являются наиболее простыми, однако при выходе из строя конденсаторов или резисторов этого устройства вся система регулирования становится неработоспособной.
Параллельные корректирующие устройства снижают частоту среза системы и делают систему малочувствительной к помехам и шумам. Совместным включением последовательного и параллельного корректирующих устройств можно получить высококачественную систему автоматического регулирования.
2.4 Построение желаемой амплитудной характеристики САУ
Желаемая ЛАХ определяется показателями качества и точности процессов регулирования.
Низкочастотная её часть обусловливает точность воспроизведения медленно изменяющихся воздействий, по ней можно определить добротности по скорости и ускорению и статическую ошибку системы.
Частота среза системы определяется номограмм (рис. 3):
По ![]() определяем
определяем ![]() , а по
, а по ![]() находим значение
находим значение  . Затем при заданном
. Затем при заданном ![]() определяем
определяем ![]() .
.
Для наиболее простой реализации последовательного корректирующего устройства изломы наклонов высокочастотного участка желаемой ЛАХ и ЛАХ неизменяемой части системы должны совпадать. Рассмотрим следующий пример.
Пример. Требуется построить желаемую ЛАХ следящей системы с астатизмом первого порядка по следующим данным:
Ошибка системы при заданных скорости и ускорении -  ,
, ![]() не должна превышать
не должна превышать ![]() , т. е.
, т. е. ![]() ; при ступенчатом единичном входном воздействии на систему
; при ступенчатом единичном входном воздействии на систему  и
и ![]() c; неизменяемая часть системы имеет передаточную функцию вида:
c; неизменяемая часть системы имеет передаточную функцию вида:

 (12)
(12)
где ![]() .
.
Определим добротности системы по скорости и ускорению ![]() и
и ![]() . Запишем ошибку следящей системы:
. Запишем ошибку следящей системы:
 (13)
(13)
Первое слагаемое, называемое скоростной (кинематической) ошибкой, примем равным 3, второе, называемое динамической ошибкой – 15. Далее не составит труда определить добротности: ![]() .
. 
Если принять, что в области малых частот желаемая ЛАХ состоит из двух участков с наклоном ![]() и
и ![]() , то
, то ![]() и
и ![]() определяются по:
определяются по:
![]() .
.
Таким образом, получим низкочастотную часть желаемой ЛАХ (рис. 5). Для построения её среднечастотной части определим по номограммам (рис. 3) значение  для заданного
для заданного ![]() , а затем значение частоты среза
, а затем значение частоты среза ![]() при заданном
при заданном ![]() ; отложим значение
; отложим значение ![]() на оси частот и проведём через эту точку среднюю часть желаемой ЛАХ, прямую с наклоном
на оси частот и проведём через эту точку среднюю часть желаемой ЛАХ, прямую с наклоном ![]() . Для построения высокочастотной части желаемой ЛАХ поступим следующим образом.
. Для построения высокочастотной части желаемой ЛАХ поступим следующим образом.
На рисунке 5 нанесём ЛАХ неизменяемой части при ![]() .
.
![]()
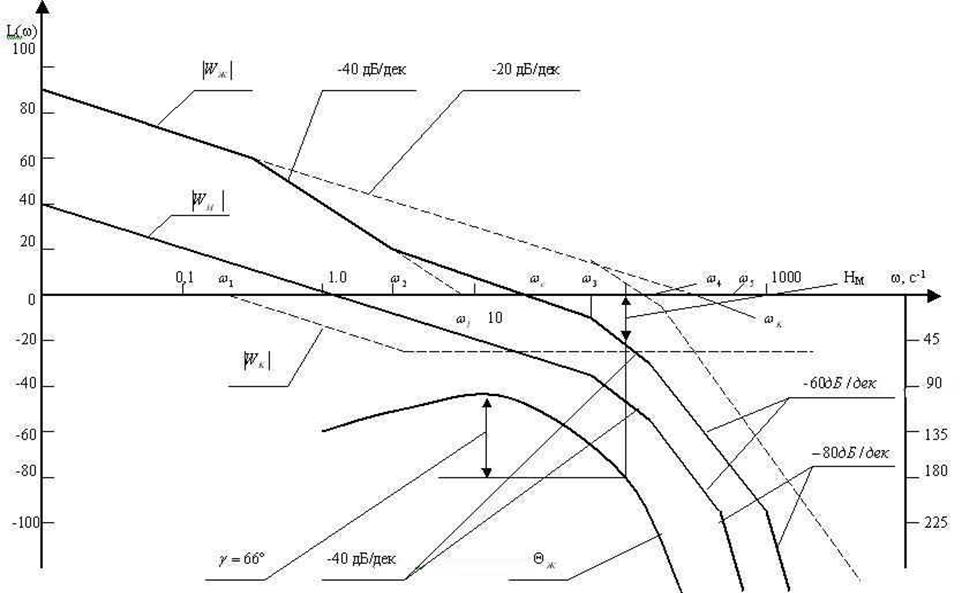
![]() Рисунок 5 - Построение желаемой ЛАХ
Рисунок 5 - Построение желаемой ЛАХ
Ломаная ![]() , полученная по (12) при подстановке
, полученная по (12) при подстановке ![]() . Для более простой реализации последовательного корректирующего устройства наклоны высокочастотной части желаемой ЛАХ примем равными наклонам ЛАХ неизменяемой части системы с теми же точками излома по частотам
. Для более простой реализации последовательного корректирующего устройства наклоны высокочастотной части желаемой ЛАХ примем равными наклонам ЛАХ неизменяемой части системы с теми же точками излома по частотам  ,
,![]() ,
,![]()
Вычитанием ![]() из
из ![]() получим ЛАХ корректирующего устройства
получим ЛАХ корректирующего устройства ![]() .
.
Проверку правильности построения ![]() выполним по фазовой частотной характеристике
выполним по фазовой частотной характеристике ![]() , вычисленной в среднечастотной части:
, вычисленной в среднечастотной части:
 . (14)
. (14)
Как видно, синтезированная по требованиям качества и точности процессов регулирования система имеет запас устойчивости по модулю ![]() . Полученные запасы устойчивости полностью обеспечивают заданное качество системы (табл. 4).
. Полученные запасы устойчивости полностью обеспечивают заданное качество системы (табл. 4).
В ряде случаев в синтезируемых САР приходится уменьшать частоту среза ![]() ,например, по условиям качества при случайных воздействиях на систему. Тогда целесообразно строить желаемую ЛАХ с низкочастотной частью, имеющей
,например, по условиям качества при случайных воздействиях на систему. Тогда целесообразно строить желаемую ЛАХ с низкочастотной частью, имеющей ![]() .
.
В случаях, когда требуется повысит точность системы регулирования, целесообразно строить желаемую ЛАХ с наклонами ![]() т. е. увеличивать порядок астатизма, а далее - соответственно с наклонами неизменяемой части.
т. е. увеличивать порядок астатизма, а далее - соответственно с наклонами неизменяемой части.
2.6 Синтез последовательных корректирующих устройств
Передаточную функцию разомкнутой САР с последовательным корректирующим устройством можно записать:
Wж(s) = Wк(s)KуWн(s), (15)
где Wк(s) – передаточная функция последовательного корректирующего устройства.
При подстановке в (4.11) s = jω получим:
![]()
![]() или (16)
или (16)
![]()
![]() (17)
(17)
Если добротность САР ![]() превышает коэффициент усиления неизменяемой части
превышает коэффициент усиления неизменяемой части ![]() , то для определения корректирующего устройства необходимо поднять ЛАХ неизменяемой части до уровня желаемой характеристики, а затем графически найти
, то для определения корректирующего устройства необходимо поднять ЛАХ неизменяемой части до уровня желаемой характеристики, а затем графически найти ![]() , как это показано на рисунке 5. Коэффициент Ку определяется как:
, как это показано на рисунке 5. Коэффициент Ку определяется как:
![]() . (18)
. (18)
По точкам излома ЛАХ определяют постоянные времени.
В синтезируемой системе ![]() , следовательно нужно воспользоваться выражениями (15) и (16).
, следовательно нужно воспользоваться выражениями (15) и (16).
После определения ЛАХ ![]() (рис. 5) запишем его передаточную функцию:
(рис. 5) запишем его передаточную функцию:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
