
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Модуль 4. Сплошная среда
Основная литература
1. , Курс теоретической механики для физиков, Изд-во МГУ, 1974
2. , , «Гидродинамика», Москва, «Наука», 1988
Макроскопическая динамика вещества, или механика сплошных сред строится на основе описания вещества с помощью усредненных характеристик его внутреннего состояния. Методы вычисления усредненных характеристик вещества в состоянии статистического равновесия составляют содержание статистической физики. Динамические уравнения механики сплошной среды являются приближенными следствиями кинетической теории.
Любое вещество состоит из структурных элементов. Структурными элементами являются участки вещества, внутренняя энергия которых существенно превышает их энергию взаимодействия с окружающими участками. Другими словами структурные элементы труднее расщепить, нежели отделить друг от друга. В низкоэнергетических состояниях вещества это обычно молекулы и атомы. Эти структурные элементы мы будем называть частицами.
Макро частицы и поля
Рассмотрим систему с большим числом частиц. Будем считать, что отдельные участки этой системы находятся в состоянии статистического равновесия. При этом не обязательно, чтобы в равновесии находилась вся система целиком. Систему будем называть средой, равновесные участки – макро частицами (такой участок называют еще представительным объемом).
Важно всегда иметь в виду, что макро частица состоит из большого числа частиц (атомов, молекул). Единственное условие - макро частица находится в состоянии статистического равновесия. Для выполнения этого условия в среде должны отсутствовать большие градиенты термодинамических параметров и слишком быстрые процессы изменения этих параметров.
Итак, среда состоит из непрерывной совокупности макро частиц. В масштабах среды макро частица имеет физически бесконечно малую массу Δm, объем ΔV, энергию ΔE, энтропию ΔS и другие характеристики, аддитивно зависящие от числа частиц, из которых состоит макро частица. Такие характеристики будем выделять символом Δ. Все средние характеристики макро частицы, не зависящие от числа входящих в нее частиц, участвуют в определении ее текущего состояния. Это положение центра масс макро частицы r, которое называется положением макро частицы, скорость центра масс v – скорость макро частицы, плотность массы ρ = Δm/ΔV, температура T и т. д.
Макро частица, таким образом, является однородным участком вещества. Все ее средние характеристики неизменны на протяжении ее объема. Состояние среды в целом описывается усредненными параметрами, заданными для всех макро частиц. Так скорости макро частиц во всей среде задаются векторной функцией v(r,t). Эта функция определяет скорость макро частицы, находящейся в момент времени t в положении r. Такие функции принято называть полевыми, или полями. Поля, описывающие состояние среды, могут быть скалярными. Это, например, поле плотности ρ(r,t), поле температуры T(r,t). Поля могут быть векторными. Это поле бесконечно малых смещений u(r,t) = dr макро частиц, поле скоростей v(r,t). Поля могут быть также тензорными. Примерами являются поле напряжений σik(r,t) и поле бесконечно малых деформаций εik(r,t), с которыми мы познакомимся ниже.
В дальнейшем изложении макро частица будет играть роль основного динамического объекта. Уравнения, описывающие динамику макро частицы, записываются в виде уравнений для полевых функций, характеризующих динамику вещества в целом.
Кинематика макро частицы
Начнем с описания бесконечно малого смещения макро частицы (рис. 1), рассматривая ее не как точечный, а как протяженный объект.
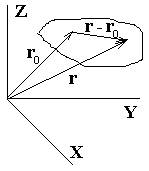
Рис.1
Положение произвольной точки макро частицы описывается радиус-вектором r = r0 + r’. Здесь r0 – радиус-вектор некоторой выделенной точки, например центра масс, а r’ = r – r0 – радиус-вектор той же точки относительно центра масс. Таким образом, бесконечно малое смещение dr складывается из смещения центра масс dr0 и относительного смещения dr’: dr = dr0 + dr’.
В свою очередь относительное смещение dr’ можно разложить на поворот и изменение длины вектора r’ (деформацию): dr’ = d(n|r’|) = |r’|dn + nd(|r’|). Здесь n – единичный вектор, направленный вдоль r’.
При бесконечно малом повороте dn = [dφ n], где dφ - угол бесконечно малого поворота. Поэтому dr’ = |r’|[dφ n] + nd(|r’|) = [dφ r’] + nd(|r’|). В тензорных обозначениях то же соотношение имеет вид dxi’ = eilkdφlxk’ + nid(|r’|) (*).
Последнее слагаемое nid(|r’|), которое определяет бесконечно малую деформацию макро частицы, можно представить в виде
![]() .
.
Подставив в качестве dxk’ левую часть этого же выражения, получим
(В скобках заметим, что последнее соотношение можно получить также искусственным приемом, умножив левую часть nid|r’| на единицу, представленную в виде 1 = x’knk/|r’|.)
Таким образом, полное смещение частицы dxi может быть записано в форме
 (1.0)
(1.0)
В скобках стоит сумма двух тензоров – антисимметричного тензора бесконечно малого поворота χik = eilkdφl и симметричного тензора бесконечно малой деформации εik = ninkd(|r’|)/|r’|.
Получим выражения этих тензоров через производные поля бесконечно малых смещений dr = u(r,t).
Разложим это поле вблизи центра масс макро частицы r0 по степеням r’ = r - r0 , где |r’| = |r - r0| порядка размеров макро частицы. С точностью до первого порядка малости каждую компоненту ui (i = 1, 2, 3) векторной функции u можно записать в виде:

Или
 (1.1)
(1.1)
Как и в формуле (1.0) 1-ое слагаемое в правой части (1.1) описывает бесконечно малое поступательное смещение макро частицы в целом – смещение ее центра масс. Второе слагаемое  - относительное перемещение частиц, из которых состоит макро частица.
- относительное перемещение частиц, из которых состоит макро частица.
Коэффициенты линейной формы ∂ui/∂xj в правой части (1.1) образуют тензор второго ранга. Как любой тензор 2-ого ранга ∂ui/∂xj можно представить в виде суммы симметричного и кососимметрического тензора
 (1.2)
(1.2)
Сравнивая это представление и формулу (1.1) с (1.0), легко увидеть, что симметричная часть является тензором бесконечно малых деформаций
 (1.3.1)
(1.3.1)
а кососимметрический тензор - тензором бесконечно малых вращений
 (1.3.2)
(1.3.2)
Самостоятельно покажите, что из сравнения двух определений тензора вращений следует, что dφ = rotu/2. Другими словами, наличие вращений определяется ротором поля бесконечно малых смещений u(r,t).
Из определения тензора бесконечно малых деформаций εik = ninkd(|r’|)/|r’| следует, что свертка тензора εn = εijninj с направлением n вектора r’ равна относительному бесконечно малому изменению расстояния d(|r’|)/|r’| между частицами среды в этом направлении (посчитайте самостоятельно)
εijninj = d(|r’|)/|r’| (1.4)
Таким образом, имея тензор деформаций εij(r,t) в каждой точке r среды и любой момент времени t, можно посчитать любую бесконечно малую деформацию εn(r,t) в среде.
Деформация макро частицы может сопровождаться изменением ее объема. Выразим это изменение через тензор деформаций.
Так как макро частица мала, то ее форма может быть произвольной. Предположим, что она имеет форму прямоугольного параллелепипеда со сторонами x1’, x2’, x3’. Тогда объем макро частицы равен ΔV = x1’x2’x3’, а относительное изменение объема
![]()
Согласно (1.4) ![]() ,
,
где n(k)- единичный вектор k-ой оси. У этого вектора отлична от нуля лишь k–ая компонента, которая равна единице. Поэтому ![]() - k-ая диагональная компонента тензора деформаций.
- k-ая диагональная компонента тензора деформаций.
Итак, относительное бесконечно малое изменение объема макро частицы равно сумме диагональных компонент тензора бесконечно малых деформаций, то есть следу тензора деформаций εij
![]() . (1.5)
. (1.5)
Если след εij равен нулю, то деформация не приводит к изменению объема в данной точке среды. Деформация, не приводящая к изменению объема среды, называется сдвигом.
В тензоре εij можно выделить ту его часть, которая определяет сдвиг
![]() (1.6)
(1.6)
В записанном равенстве в круглых скобках стоит тензор, след которого равен нулю. Действительно
![]() .
.
Последнее слагаемое в (1.6) δijεll/3 представляет собой диагональный тензор с одинаковыми компонентами εll/3 на диагонали. Такой тензор определяет одну и ту же деформацию во всех трех направлениях. Поэтому он отвечает равномерному сжатию (εll < 0) или расширению (εll > 0) вещества.
Соотношение (1,6) говорит о том, что любая деформация может быть разложена на сдвиг и равномерное сжатие (расширение). Сдвигу отвечает тензор деформации с нулевым следом, или девиатор. Равномерной деформации отвечает диагональный тензор деформации δijεll/3 с одинаковыми диагональными компонентами, называемый шаровым.
Вернемся теперь к общему соотношению (1.1) и перепишем его в виде
ui(r,t) = ui(r0,t) + χijxj’ + εijxj’. (1.7)
Первые два слагаемых в (1.7) определяют поступательное ui(r0,t) и вращательное χijxj’ смещения макро частицы, характерные для абсолютно твердого тела. Последнее слагаемое εijxj’ описывает деформацию и отличает макро частицу от абсолютно твердого тела. Наличие деформаций приводит к специфическим отличиям динамических уравнений макро частицы от уравнений движения абсолютно твердого тела, так как в движении начинают участвовать дополнительные внутренние степени свободы, связанные с относительным перемещением частиц.
Разделив (1.7) на бесконечно малый промежуток времени, получим выражение для скорости макро частицы v ≡ u/dt:
![]() (1.8)
(1.8)
Здесь V0 - поступательная скорость макро частицы (скорость центра масс), Ω - угловая скорость вращения, а  так называемый тензор скоростей деформаций.
так называемый тензор скоростей деформаций.
Так как vi(r,t) - поле скоростей среды, то ∂vi/∂xk - градиент этого поля. Следовательно, тензор скоростей деформаций есть симметричная часть градиента поля скоростей. Кососимметричной частью градиента поля скоростей является тензор  . Он определяет угловую скорость вращения макро частицы так, что (покажите!)
. Он определяет угловую скорость вращения макро частицы так, что (покажите!)
Ω = rotv/2. (1.9)
Другими словами, ротор поля скоростей описывает угловую скорость вращения макро частицы, находящейся в данной точке среды.
Учитывая определение vik и соотношение (1.5), получим
![]() .
.
То есть след тензора скоростей деформаций в каждой точке среды определяет скорость относительного изменения объема макро частицы, находящейся в этой точке. Дивергенция («расхождение») поля скоростей описывает скорость относительного расширения (vii > 0) или сжатия (vii < 0) среды в данной точке.
Вопросы для самоконтроля
1. Что такое макро частица?
2. Каким образом описываются свойства сплошной среды в целом?
3. Что называется тензором бесконечно малых поворотов и как выражается угол бесконечно малого поворота через поле бесконечно малых смещений?
4. Что называется тензором бесконечно малых деформаций?
5. Как определяется деформация вещества в данной точке и направлении?
6. Как определяется изменение объема макро частицы?
7. Что называется деформацией сдвига, и какая часть тензора деформаций ей соответствует?
8. На какие деформации можно разложить общую деформацию?
9. Как выглядит бесконечно малое смещение макро частицы в общем случае?
10. В чем отличие макро частицы от абсолютно твердого тела?
11. Что такое тензор скоростей деформаций?
12. Какой физический смысл ротора и дивергенции поля скоростей?
Динамика макро частицы как твердого тела
Предыдущий раздел показывает, что макро частица, как и абсолютно твердое тело обладает поступательными и вращательными степеням свободы. Поэтому динамика твердотельных степеней свободы макро частицы должна описываться теми же уравнениями, что и динамика абсолютно твердого тела. А именно, поступательным степеням свободы должно отвечать уравнение изменения импульса макро частицы
dΔP/dt = ΔF (2.1)
а вращательным степеням свободы - уравнение изменения момента импульса
dΔS/dt = ΔK (2.2)
Уравнение изменения импульса макро частицы
Рассмотрим вначале уравнение (2.1).
Импульс макро частицы можно записать в виде ΔP = Δmv, где Δm - масса макро частицы, остающаяся постоянной в процессе ее движения, а v - скорость центра масс макро частицы, или просто скорость макро частицы, если не учитывать ее размеров.
Силы, действующие на макро частицу, во-первых, обязаны своим существованием внешним полям (например, полю тяжести) и обычно пропорциональны массе макро частицы ΔFV = Δmg. Здесь ΔFV так называемая объемная сила, a g - массовая плотность объемных сил (ускорение свободного падения в случае поля тяжести).
Во-вторых, на макро частицу воздействуют также окружающие участки вещества. Это воздействие определяется взаимодействием частиц вещества. Оно играет основную роль в процессе установления теплового равновесия в среде. В обычных условиях силы взаимодействия между частицами короткодействующие, то есть каждая частица «ощущает» лишь влияние ближайшего окружения. Воздействие от далекого окружения либо экранируется (при кулоновском взаимодействии), либо быстро убывает с расстоянием (при диполь-дипольном взаимодействии). Этот факт позволяет учитывать влияние взаимодействия частиц лишь в поверхностном слое макро частицы. Соответствующий вклад в силу, действующую на макро частицу, можно записать в виде суммы элементарных сил dFf, действующих на поверхность Δf:
![]()
Сила ΔFS называется поверхностной. Интеграл, стоящий в последнем выражении, зависит не только от действующих сил, но и от геометрии поверхности Δf. Будем считать, что вся поверхность Δf состоит из небольших плоских участков площадью df, каждый из которых имеет некоторую ориентацию в пространстве, и nf – единичный вектор внешней нормали к нему. Тогда можно ввести ориентированный элемент поверхности df - вектор, по величине равный площади df, а по направлению совпадающий с вектором nf.
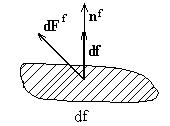
Рис. 2
Элементарная сила dFif, действующая на площадку df, пропорциональна величине площадки:
![]()
Площадь df можно записать как скалярное произведение ориентированного элемента поверхности df и единичного вектора этой ориентации df = nfdf. Или, в тензорных обозначениях, df = njfdfj. Поэтому вектор элементарной силы dF является линейной однородной функцией другого вектора – ориентированного элемента поверхности df:
![]()
Коэффициенты этой линейной зависимости ![]() образуют матрицу тензора напряжений.
образуют матрицу тензора напряжений.
Как видно, тензор напряжений определяет поверхностную силу, действующую в веществе на единицу площади поверхности. При этом он несет в себе информацию как о самой элементарной силе dF, так и о площадке df и ее ориентации nf.
Имея тензор напряжений, можно вычислять давления сил, действующих в произвольных направлениях внутри вещества. Если n - единичный вектор некоторого направления в веществе, то давление на вещество, находящееся «под» поверхностью df = ndf площадки, ориентированной в направлении n, равно по определению отношению элементарной силы, действующей в направлении, противоположном n, к величине площадки df:
![]()
С другой стороны согласно определению тензора напряжений для площадки, ориентированной вдоль n
![]()
Следовательно,
![]()
С другой стороны, давление можно записать в форме
![]() .
.
Заменив dFif/df на σijnj согласно предыдущему равенству, получим
![]()
Это проекция тензора напряжений на направление n с обратным знаком.
Диагональные компоненты тензора напряжений представляют собой проекции тензора напряжений на координатные оси. Действительно, если ![]() - j-ая компонента i-ой координатной оси, то
- j-ая компонента i-ой координатной оси, то  . Поэтому проекция тензора напряжений
. Поэтому проекция тензора напряжений ![]() на эту ось равна:
на эту ось равна:
![]()
(Здесь по i суммирование отсутствует!).
Диагональные компоненты тензора напряжений описывают действие нормальных составляющих сил.
Недиагональные компоненты σij описывают действие касательных составляющих сил. Ведь j-ая компонента поверхностной силы ![]() лежит в плоскости, перпендикулярной ориентации площадки dfi, если j ≠ i.
лежит в плоскости, перпендикулярной ориентации площадки dfi, если j ≠ i.
Если в среде вообще не возникает касательных напряжений и среда изотропная, то тензор напряжений σij диагональный для всех направлений и его диагональные компоненты равны давлению с обратным знаком. То есть, σij = - pδij.
Итак, поверхностные силы, действующие на макро частицу, могут быть записаны в виде
![]() .
.
Переходя в этом интеграле к интегрированию по объему макро частицы ΔV, получим
![]()
Пренебрегая размерами частицы, то есть, считая функцию ∂σij/∂xj постоянной во всем объеме макро частицы, придем к окончательному выражению
![]()
Таким образом, уравнение изменения импульса макро частицы (2.1) можно переписать в виде:
![]()
Деля обе части уравнения на ΔV и учитывая, что Δm/ΔV = ρ(r,t) - плотность вещества в точке, где находится макро частица, получим
![]() . (2.3)
. (2.3)
Физический смысл основного динамического уравнения макро частицы (2.3)
В рассматриваемой модели состояние каждой макро частицы среды, находящейся в точке r в момент времени t, зависит от трех физических характеристик – плотности вещества ρ = ρ(r,t), скорости макро частицы vi = vi(r,t) и напряжений σij = σij(r,t). Число макро частиц бесконечно и распределены они непрерывным, континуальным образом в пространстве. Координаты r играют роль индексов, нумерующих макро частицы и пробегающих континуальное множество значений, в отличие от систем с конечным (или счетным) числом степеней свободы. Отсюда термин «сплошная среда». Функции координат образуют непрерывные поля – скалярные (как плотность), векторные (как скорость), тензорные (как напряжения).
Производная любого поля по координатам (например, тензора напряжений в правой части (2.3)) определяет изменение этого поля при переходе от одной макро частицы к другой. Частная производная поля по времени определяет изменение этого поля в данной фиксированной точке пространства. Уравнения (2.3) представляют собой 3 уравнения в частных производных для полевых функций. Полная производная полевой функции по времени определяет изменение данного поля с учетом перемещения макро частицы. В частности, производная dvi/dt определяет ускорение макро частицы. Она содержит в себе изменение поля скорости в данной точке пространства (частная производная по времени) и изменение поля скорости за счет различия в скоростях у макро частиц, находящихся в разных точках пространства
![]()
Если плотность и напряжения заданы в каждой точке и в каждый момент времени, то уравнение (2.3) определяет зависимость векторного поля скоростей от времени для всех макро частиц, или во всех точках пространства. Начальным условием может служить, например, поле скоростей во всех точках среды в некоторый начальный момент времени. Однако обычно плотность и/или напряжения зависят от состояния движения среды. В этом случае требуются дополнительные уравнения для описания динамики среды.
Уравнение изменения момента импульса макро частицы
Рассмотрим уравнение изменения момента импульса макро частицы (2.2).
Проекции момента импульса макро частицы на подвижные оси имеют вид:
![]()
Компоненты тензора моментов инерции
![]()
Здесь суммирование проводится по всем частицам (атомам, молекулам), из которых состоит макро частица. Мы видим, что моменты инерции являются величинами пятого порядка малости по размерам макро частицы (масса, как и объем макро частицы, является величиной третьей степени малости по ее размерам). Поэтому их объемная или массовая плотность пропорциональны квадрату линейных размеров макро частицы, и исчезают при переходе к пределу точечной макро частицы.
Плотность момента объемных сил
![]()
является линейной по размерам макро частицы, и, следовательно, так же исчезает в пределе бесконечно малой макро частицы.
Момент поверхностных сил
![]()

состоит из двух слагаемых.
Первое слагаемое с точностью до членов четвертого порядка по размерам макро частицы можно записать в виде
![]()
Объемная плотность второго слагаемого ![]() линейна по размерам макро частицы (сравните с оценкой момента объемных сил) и также исчезает в пределе точечной макро частицы.
линейна по размерам макро частицы (сравните с оценкой момента объемных сил) и также исчезает в пределе точечной макро частицы.
Следовательно, уравнение изменения момента импульса (2.2), записанное в расчете на единицу объема, имеет вид
eikl σkl = 0 (2.4)
Так как eikl - кососимметрический тензор, то уравнения (2.4) означают, что тензор напряжений - симметричный тензор. И это единственный вывод, который можно сделать из уравнения изменения момента импульса макро частицы.
Итак, динамические уравнения макро частицы, отвечающие твердотельным степеням свободы - поступательному движению и вращению, сводятся фактически к трем независимым уравнениям (2.3). В них входят в общем случае 10 неизвестных полевых функций. Это плотность ρ(r,t), 3 компоненты поля скоростей vi(r,t) и 6 независимых компонент симметричного тензора напряжений σij(r,t). Для получения дополнительных уравнений необходимо рассмотреть динамику внутренних степеней свободы макро частицы, связанных с деформацией.
Вопросы для самоконтроля
1. Какие уравнения, определяют твердотельную динамику макро частицы?
2. Какие силы называют объемными и поверхностными?
3. Что такое тензор напряжений?
4. Как вычисляется давление внутри сплошной среды?
5. Как определяются нормальные и касательные напряжения?
6. Как выглядит тензор напряжений в изотропной среде при отсутствии касательных напряжений?
7. Как выглядит уравнение изменения импульса макро частицы для полевых функций среды, и какие полевые функции в него входят?
8. К чему сводится уравнение изменения момента импульса макро частицы?
Динамика внутренних степеней свободы макро частицы
Последовательное построение модели, позволяющей вычислять средние характеристики макро частицы, проводится в рамках статистической физики и физической кинетики. В частности, динамические уравнения, полученные ниже, следуют из так называемого кинетического уравнения. (См. , , «Физическая кинетика», §§ 1-8.)
Статистическая физика утверждает, что внутреннее состояние макро частицы, находящейся по определению в статистическом равновесии (см. заключительный раздел предыдущего модуля), может быть описано некоторым набором, так называемых, термодинамических параметров. Термодинамическими параметрами являются плотность вещества ρ, тензор напряжений σij, тензор деформаций uij, температура T, энтропия ΔS. Температура макро частицы характеризует, грубо говоря, среднюю кинетическую энергию частиц (атомов, молекул), а энтропия — логарифм числа микроскопических состояний этих частиц (то есть их возможных положений и значений скорости), реализующих одно и то же (или очень близкое к ней) значение внутренней энергии макро частицы. Энтропия в отличие от температуры является параметром, аддитивным по числу структурных элементов. Таким же свойством обладают масса, объем, внутренняя энергия макро частицы. Обычно используют плотность энтропии либо на единицу массы вещества s = ΔS/Δm, либо на единицу объема S = ΔS/ΔV. Тензор конечных (но малых) деформаций uij связан с тензором бесконечно малых деформаций соотношением εij = duij.
Уравнения термодинамического состояния
Законы статистической физики утверждают, что между термодинамическими параметрами существуют соотношения, конкретные для каждого типа среды. Эти соотношения называются уравнениями термодинамического состояния вещества. Примером может служить уравнение Клайперона pΔV = kΔNT - уравнение термодинамического состояния идеального газа. Здесь k - постоянная Больцмана, связывающая единицы измерения температуры (градусы) с единицами измерения энергии (например, Джоули), ΔN - число молекул (атомов) газа в макро частице газа объемом ΔV. Другой пример уравнения термодинамического состояния σik = λiklmulm – αik(T – T0) – закон Гука для идеально-упругой среды. Здесь λiklm – тензор модулей упругости, αik – тензор модулей термоупругости, а T0 – температура в равновесии.
Термодинамика учит, что уравнения термодинамического состояния вещества получаются, если известна одна из функций термодинамических параметров – один из так называемых термодинамических потенциалов (или характеристических функций). Получение термодинамических потенциалов вещества является одной из основных задач статистической физики. Примером термодинамического потенциала может служить внутренняя энергия вещества как функция тензора деформации и энтропии.
Как мы знаем, внутренняя энергия механической системы состоит из потенциальной энергии и кинетической энергии относительного движения. Заметим, что кинетическая энергия вращения макро частицы Tвр = ½ΔIikΩiΩk,, являющаяся частью ее внутренней энергии, имеет пятый порядок малости по размерам макро частицы из-за входящего в нее тензора моментов инерции и в дальнейшем не учитывается.
При взаимодействии с окружением энергия макро частицы меняется. При бесконечно малом изменении энтропии d(ΔS) макро частицы ее внутренняя энергия ΔEint меняется на величину d(ΔEint) = Td(ΔS). Это изменение касается относительного движения частиц и называется теплом. (Заметим, что записанное соотношение можно рассматривать как определение температуры – энтропия зависит от энергии, и ее производная по энергии есть обратная температура, параграф «Температура» в курсе «Статистическая физика».) Теплоперенос может осуществляться разными путями, например, за счет контакта с соседней макро частицей, обладающей другой температурой. Ниже мы рассмотрим соответствующее уравнение переноса тепловой энергии.
Другим источником изменения энергии макро частицы является работа, совершаемая внешними силами. Часть этой работы может идти на изменение потенциальной энергии макро частицы во внешнем поле, часть – может превратиться в тепло или деформировать макро частицу. В частности, часть работы внешних сил изменяет лишь кинетическую энергию центра масс макро частицы.
Изменение полной энергии ΔEtot за счет работы внешних сил имеет вид
 (3.0).
(3.0).
Смещение ui состоит, как мы видели, из смещения центра масс частицы u0i и внутренних перемещений структурных элементов друг относительно друга. Ускоренное смещение центра масс определяет изменение лишь кинетической энергии центра масс частицы d(ΔEcm) = u0iΔFi. Динамика изменений энергии центра масс макро частицы содержится в уравнении движения (2.3), полученном в предыдущем разделе. Покажите самостоятельно, что соотношение d(ΔEcm) = u0iΔFi и уравнения (2.3) эквивалентны.
Внутренние перемещения складываются из поворотов χijxj’ и деформаций εijxj’. Именно они определяют изменение внутренней энергии за счет работы внешних сил
![]()
В правой части соотношения содержатся слагаемые разных порядков по размерам макро частицы. Работа массовых сил по деформации и повороту макро частицы 5-ого порядка, а в работе поверхностных сил есть как слагаемые третьего, так и пятого порядка. Вот последовательность вычислений

1-ое и 3-ье слагаемые в этом выражении имеют пятый порядок малости по размерам макро частицы. Второе слагаемое равно нулю. Ведь ![]() , а свертка по всем компонентам кососимметричного тензора поворотов χij с симметричным тензором напряжений σij равна нулю (посчитайте самостоятельно). Остается последнее слагаемое, которое с точностью до членов четвертого порядка по размерам макро частицы имеет вид
, а свертка по всем компонентам кососимметричного тензора поворотов χij с симметричным тензором напряжений σij равна нулю (посчитайте самостоятельно). Остается последнее слагаемое, которое с точностью до членов четвертого порядка по размерам макро частицы имеет вид

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
