
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1. Определить опорные реакции и произвести их проверку.
2. Написать аналитические выражения изгибающего момента ![]() и поперечной силы Q для каждого участка.
и поперечной силы Q для каждого участка.
3. Построить эпюры изгибающих моментов ![]() и поперечных сил Q. На эпюрах указать численные значения ординат для характерных сечений.
и поперечных сил Q. На эпюрах указать численные значения ординат для характерных сечений.
4. По максимальному изгибающему моменту подобрать стальную балку двутаврового поперечного сечения при допускаемом напряжении![]() .
.
Длина одного пролета балки ![]() .
.
Исходные данные:
- схему выбрать на рис.5 по предпоследней цифре учебного шифра;
- расчетные параметры выбрать из таблицы 7 по номеру строки, определяемой по последней цифре шифра.
Для цифры 0 выбирается схема X.
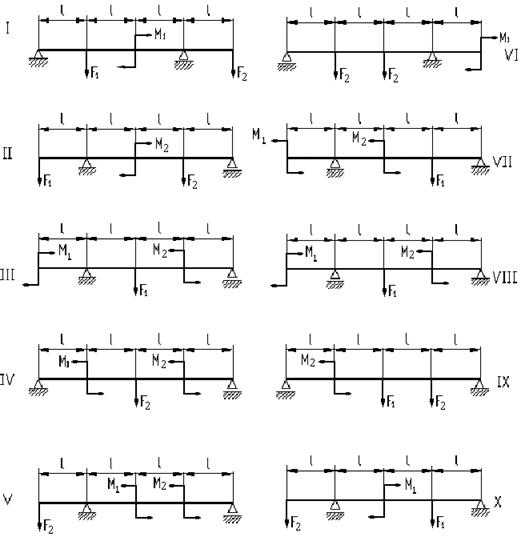
Рис. 5
Таблица 7
Номер строки |
|
| Номер строки |
|
|
1 | 5 | 10 | 6 | 3 | 8 |
2 | 4 | 8 | 7 | 4 | 7 |
3 | 3 | 7 | 8 | 3 | 6 |
4 | 6 | 6 | 9 | 6 | 10 |
5 | 5 | 10 | 0 | 4 | 8 |
 ;
; .
.
Задача 5
Приведите краткое описание наиболее распространенных типов резьб. Укажите их основные параметры и область применения.
Задача. Определить диаметр болта (рис.6 а) из Ст 3 с метрической резьбой, исходя из условия, что при коэффициенте трения ![]() сила трения между листами больше сдвигающей силы
сила трения между листами больше сдвигающей силы![]() . Для Ст 3
. Для Ст 3  .
.
Определить диаметр болта (рис.6 б) из Ст 3 с метрической резьбой, исходя из условия, что болт поставлен без зазора. Для Ст 3 допускаемые напряжения среза
[t]ср = 80 МПа, а допускаемые напряжения смятия для материала скрепляемых листов [s]см = 65 МПа (толщины листов d1=10мм, d2=15мм).
Расчетные данные приведены в таблице 8.
Номер варианта выбирается по последней цифре учебного шифра.
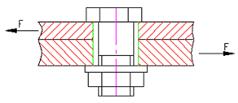
а б
Рис. 6
Таблица 8
Вариант | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 1 | 1.5 | 2 | 2,5 | 3 | 3,5 | 4 | 4.5 | 5 | 5,5 |
Задача 6
Приведите краткое описание известных вам типов шпоночных соединений.
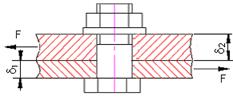
Задача. Рассчитать наибольший крутящий момент, который может передать соединение (рис.7) с номинальным диаметром ![]() стандартной призматической шпонкой, длина которой
стандартной призматической шпонкой, длина которой ![]() , если допускаемые напряжения среза материала шпонки.
, если допускаемые напряжения среза материала шпонки.
![]() , смятия
, смятия ![]() .
.
Данные для расчета приведены в таблице 9.
Номер варианта выбирается по последней цифре учебного шифра.
Размеры ![]() и
и ![]() сечения призматической шпонки стандартизованы и выбираются по ГОСТ , а также стр. 302 [8].
сечения призматической шпонки стандартизованы и выбираются по ГОСТ , а также стр. 302 [8].
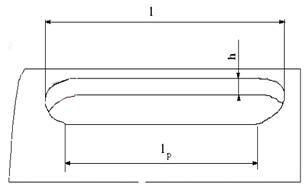
Рис.7
Таблица 9
мм | Вариант | |||||||||
0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| 10 | 20 | 30 | 40 | 45 | 50 | 55 | 60 | 65 | 70 |
| 16 | 32 | 40 | 50 | 56 | 63 | 70 | 70 | 80 | 80 |
Задача 7
Полосы из стали Ст3 сварены встык (рис.8) вручную электродами Э42. Осевая сила изменяется в пределах от ![]() до
до ![]() . Определить допускаемое значение
. Определить допускаемое значение ![]() , если допускаемое напряжение для свариваемых полос
, если допускаемое напряжение для свариваемых полос ,
,
 . Данные приведены в таблице 10.
. Данные приведены в таблице 10.
Номер варианта выбирается по последней цифре учебного шифра.
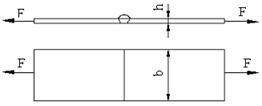
Рис. 8
Таблица 10
Вариант | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| -0,5 | -0,8 | -0,6 | -0,4 | -0,2 | -0,4 | -0,3 | -0,7 | -0,1 | 0,8 |
| 50 | 63 | 80 | 100 | 200 | 250 | 63 | 50 | 100 | 160 |
| 3 | 8 | 10 | 12 | 10 | 6 | 3 | 10 | 12 | 20 |
Методические указания
К задаче I.
Изучите и усвойте специальную терминологию, определения и основные положения «Теории механизмов и машин» [1, с]. На их базе строятся все последующие исследования и выводы.
Прежде всего, надо знать, что называют механизмом и машиной.
Механизмом называют механическую систему тел, предназначенную для преобразования движения одного или нескольких из них в требуемое движение других тел. Комплекс механизмов, состоящий из двигателей, передач, рабочих органов и контрольно-регулирующих устройств, выполняющий работу по преобразованию энергии, материалов, информации или перемещению грузов, называют машиной.
По структурно-конструктивным признакам механизмы делятся на семь следующих видов: рычажные, зубчатые, винтовые, кулачковые, фрикционные, механизмы с гибкими связями и прочие, в том числе комбинированные.
Механизм и, следовательно, машину собирают из отдельных «частей» - деталей. Деталью называют изделие, изготовленное из монолитного материала без применения сборочных операций. Одна или несколько деталей, образующих жесткую систему тел, предназначенные для выполнения определенной функции в составе механизма, называют звеном. Звено мажет быть подвижным и неподвижным. Неподвижное звено называют стойкой.
Под кинематической парой понимают подвижное соединение двух звеньев, допускающее их относительное движение. Места контакта каждого из двух звеньев называют элементами кинематической пары. Элементы низших пар — поверхности, высших — линии или точки.
На относительное движение каждого звена элементы кинематической пары налагают ограничения, называемые связями. В зависимости от числа налагаемых связей кинематические пары разделяют на пять классов. Под кинематической цепью понимают связанную систему звеньев, образующих между собой кинематические пары. Цепи различают открытые и замкнутые, простые и сложные, плоские и пространственные.
Число степеней свободы плоских механизмов W определяют по формуле Чебышева:
![]() ,
,
где ![]() — количество подвижных звеньев;
— количество подвижных звеньев; ![]() — количество кинематических пар 5 класса (низших пар) и
— количество кинематических пар 5 класса (низших пар) и ![]() — количество кинематических пар 4 класса (высших пар).
— количество кинематических пар 4 класса (высших пар).
Разложение кинематической цепи механизма на структурные группы называют структурным анализом. При структурном анализе определяют количество звеньев, количество и класс кинематических пар, число степеней свободы, класс и порядок структурных групп. По Артоболевскому класс и порядок механизма соответствует наивысшему классу и порядку входящих в него структурных групп.
В качестве примера для решения задачи № 1 контрольной работы проведем исследование схемы механизма, представленной на рис. 9, у которого ведущее звено 1 (кривошип ![]() ) вращается со скоростью
) вращается со скоростью![]() по часовой стрелке; размеры механизма:
по часовой стрелке; размеры механизма: ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;  ;
;  , угол положения ведущего звена
, угол положения ведущего звена ![]()

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
