
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В теории механизмов и машин действительные размеры принято выражать в метрах, а их масштабные значения - в миллиметрах.
По исходным данным вычерчиваем схему механизма в произвольно выбранном, но удобном для построения масштабе![]() , м/мм, где
, м/мм, где ![]() - масштабный коэффициент, который показывает, сколько метров действительной длины содержится в одном миллиметре отрезка на чертеже.
- масштабный коэффициент, который показывает, сколько метров действительной длины содержится в одном миллиметре отрезка на чертеже.
Действительная длина ведущего звана ![]() . На чертеже изобразим его отрезком
. На чертеже изобразим его отрезком  . Тогда масштабный коэффициент будет равен
. Тогда масштабный коэффициент будет равен
 .
.
В этом масштабе вычерчиваем схему механизма. Размеры в мм остальных звеньев в выбранном масштабе определяются соответственно:
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Согласно принципу образования механизмов, сформулированному впервые русским ученым , любой механизм может быть составлен последовательным присоединением к ведущему звену (ведущим звеньям) групп звеньев с нулевой степенью подвижности.
Исследуемый механизм имеет: число подвижных звеньев ![]() (на схеме механизма все подвижные звенья пронумерованы от 1 до 3, а неподвижное звено-стойка, обозначена через 0), число низших кинематических пар
(на схеме механизма все подвижные звенья пронумерованы от 1 до 3, а неподвижное звено-стойка, обозначена через 0), число низших кинематических пар![]() . Высших кинематических пар
. Высших кинематических пар![]() в данном механизме нет.
в данном механизме нет.
Следовательно, степень подвижности его равна:
 .
.
Это означает, что в рассматриваемом механизме достаточно задать закон движения только одному звену (в данном случае звену 1, которое является ведущим), чтобы закон движения всех остальных звеньев был бы вполне определенным.
Произведем разложение механизма на группы Ассура. Правильно выполнить эту операцию очень важно, так как с этим непосредственно связано все дальнейшее исследование механизма
Разложение механизма на группы Ассура обычно осуществляется методом попыток и его следует начинать с последней, наиболее отдаленной от ведущего звена и наиболее простой группы. Простейшая группа Ассура представляет собой сочетание двух звеньев и трех кинематических пар.
Для нашего механизма такой группой является комбинация звеньев 2 и 3 и трех вращательных кинематических пар: в точках ![]() ,
, ![]() и
и ![]() .
.
Действительно, оставшаяся часть механизма — ведущее звено ![]() — имеет степень подвижности
— имеет степень подвижности ![]() . Группа 2—3 является группой Ассура первого вида, так как все три кинематические пары являются вращательными.
. Группа 2—3 является группой Ассура первого вида, так как все три кинематические пары являются вращательными.
На рис. 10 приведен механизм, разложенный на группы Ассура (при разложении обязательно следует соблюдать взаимное расположение звеньев).
Определим теперь класс и порядок механизма, который определяется классом и порядком групп Ассура, входящих в механизм.
На основании проведенного исследования можно заключить, что данный механизм является механизмом первого класса второго порядка.
Таким образом, основная задача структурного исследования механизма — определение класса и порядка механизма — выполнена.
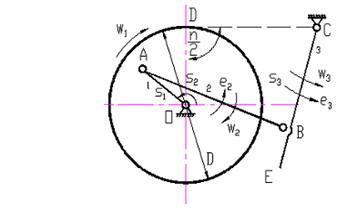
Рис.9 Схема механизма
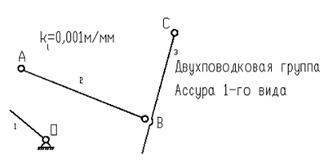
Рис.10 Разложение механизма на группы Асcура


Рис.11 План скоростей Рис.12 План ускорений
Кинематическое исследование механизма будем вести для каждой структурной группы в порядке их присоединений.
I. Определение линейных скоростей точек звеньев механизма.
Рассмотрим группу Ассура 2—3. Определим линейные скорости точек этой группы механизма. Первой такой точкой является точка ![]() ведущего звена. Точка
ведущего звена. Точка ![]() относительно точки
относительно точки ![]() совершает вращательное движение, поэтому вектор скорости точки
совершает вращательное движение, поэтому вектор скорости точки ![]() направлен перпендикулярно самому звену в сторону его вращения, а модуль скорости определяется из выражения
направлен перпендикулярно самому звену в сторону его вращения, а модуль скорости определяется из выражения
 ,
,
где ![]() — угловая скорость звена 1;
— угловая скорость звена 1;
 .
.
Следующая точка — точка ![]() . Составим систему двух векторных уравнений, которая связывает искомую скорость точки с другими скоростями. Это возможно сделать, так как точка
. Составим систему двух векторных уравнений, которая связывает искомую скорость точки с другими скоростями. Это возможно сделать, так как точка ![]() принадлежит одновременно двум звеньям — 2 и 3. Если считать, что точка
принадлежит одновременно двум звеньям — 2 и 3. Если считать, что точка ![]() принадлежит звену 2, то ее скорость равна скорости точки
принадлежит звену 2, то ее скорость равна скорости точки ![]() плюс скорость точки
плюс скорость точки ![]() относительно
относительно ![]() . Если считать, что точка
. Если считать, что точка ![]() принадлежит звену 3, то ее скорость равна скорости точки
принадлежит звену 3, то ее скорость равна скорости точки ![]() плюс скорость точки
плюс скорость точки ![]() относительно
относительно ![]() .
.
Следовательно, можно написать
 ;
;
 .
.
В этой системе уравнений известны по модулю и направлению векторы скоростей точек ![]() и
и ![]() (скорость точки
(скорость точки ![]() была определена выше, а скорость точки
была определена выше, а скорость точки ![]() равна 0). Векторы относительных скоростей неизвестны по величине, но известны по направлению. Вектор
равна 0). Векторы относительных скоростей неизвестны по величине, но известны по направлению. Вектор ![]() перпендикулярен к звену
перпендикулярен к звену ![]() , а вектор
, а вектор ![]() перпендикулярен к звену
перпендикулярен к звену ![]() , так как точка
, так как точка ![]() относительно точек
относительно точек ![]() и
и ![]() в своем относительном движении будет вращаться вокруг этих точек.
в своем относительном движении будет вращаться вокруг этих точек.
Сведя систему к одному уравнению и условившись под вектором ставить две черты, если он известен и по величине и по направлению, и одну черту под вектором, если у него известен только один из этих параметров, запишем
 .
.
Мы получили одно уравнение с двумя неизвестными, которое, как известно, может быть решено графическим методом, путем построения плана скоростей. Для этого выбираем на плоскости произвольную точку ![]() — полюс плана скоростей, которая является началом отсчета, и откладываем на ней отрезок
— полюс плана скоростей, которая является началом отсчета, и откладываем на ней отрезок ![]() , перпендикулярный к звену
, перпендикулярный к звену ![]() , в направлении движения точки
, в направлении движения точки ![]() (см. рис. 11). Длина этого отрезка изображает на плане скоростей вектор скорости точки А—
(см. рис. 11). Длина этого отрезка изображает на плане скоростей вектор скорости точки А—![]() и выбирается произвольно, исходя из удобства размещения на чертеже.
и выбирается произвольно, исходя из удобства размещения на чертеже.
Примем длину отрезка ![]() равной 88 мм, тогда масштабный коэффициент плана скоростей будет:
равной 88 мм, тогда масштабный коэффициент плана скоростей будет:
 ;
;
и покажет, сколько метров в секунду действительной величины скорости содержится в одном миллиметре отрезка на чертеже.
В соответствии с правой частью уравнения на плане скоростей через точку ![]() проводим прямую, перпендикулярную к звену 2 механизма (это линия вектора
проводим прямую, перпендикулярную к звену 2 механизма (это линия вектора ![]() ); а в соответствии с левой частью уравнения через полюс (точка
); а в соответствии с левой частью уравнения через полюс (точка ![]() совпадает с полюсом) проводим на плане прямую, перпендикулярную к звену 3 механизма (это линия вектора
совпадает с полюсом) проводим на плане прямую, перпендикулярную к звену 3 механизма (это линия вектора![]() ). Точка пересечения этих двух прямых определит точку
). Точка пересечения этих двух прямых определит точку ![]() , которая является концом вектора
, которая является концом вектора ![]() , изображающего на плане вектор скорости
, изображающего на плане вектор скорости ![]() .
.
Для определения действительной величины любого из полученных векторов достаточно умножить соответствующий отрезок на масштаб плана скоростей ![]() . Из плана скоростей найдем:
. Из плана скоростей найдем:
 ;
;
 .
.
Чтобы определять скорость точки ![]() , воспользуемся теоремой подобия. Величину
, воспользуемся теоремой подобия. Величину ![]() находим из пропорции
находим из пропорции
 ; т. е.
; т. е. .
.
Действительная величина скорости точки ![]() равна:
равна:
 .
.
Для нахождений скоростей точек ![]() ,
, ![]() ,
, ![]() — центров тяжести звеньев — воспользуемся теоремой подобия и определим положение их на плане скоростей;
— центров тяжести звеньев — воспользуемся теоремой подобия и определим положение их на плане скоростей;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  .
.
Найденные точки ![]() ,
, ![]() , и
, и ![]() , соединим с полюсом плана скоростей, и отрезки
, соединим с полюсом плана скоростей, и отрезки ![]() ,
, ![]() ,
,![]() будут в масштабе выражать скорости центров тяжести звеньев.
будут в масштабе выражать скорости центров тяжести звеньев.
Действительные значения скоростей центров тяжести будут
 ;
;
 ;
;
 .
.
Угловые скорости определяются на основе построенного плана скоростей.
Угловая скорость первого звена была определена выше и равняется  .
.
Модуль угловой скорости второго звена можно найти по формуле
 .
.
Для определения направления ![]() необходимо мысленно перенести вектор относительной скорости
необходимо мысленно перенести вектор относительной скорости ![]() из плана в точку
из плана в точку ![]() механизма, при этом мы видим, что вектор скорости стремится вращать точку
механизма, при этом мы видим, что вектор скорости стремится вращать точку ![]() звена относительно точки
звена относительно точки ![]() по часовой стрелке, следовательно, угловая скорость второго звена будет направлена по часовой стрелке.
по часовой стрелке, следовательно, угловая скорость второго звена будет направлена по часовой стрелке.
Аналогично определяем модули и направления угловых скоростей остальных звеньев.
Угловая скорость звена 3 по модулю равна
и направлена против часовой стрелки.
Направление угловых скоростей указано на схеме механизма (см. рис 9).
Определение линейных ускорений точек звеньев механизма происходит в той же последовательности, что и определение линейных скоростей.
Рассмотрим группу Ассура 2—3.
Первой точкой, ускорение которой надо определить, является точка ![]() ведущего звена.
ведущего звена.
Для упрощения решения ускорение любой точки можно представить в виде векторной суммы двух составляющих — нормальной и тангенциальной.
Учитывая это, для определения ускорения точки ![]() напишем векторное уравнение
напишем векторное уравнение
 .
.
Так как звено 1 вращается с постоянной угловой скоростью ( ), то
), то
 .
.
Следовательно, в этом частном случае полное ускорение ![]() точки
точки ![]() определяется только величиной нормального ускорения,
определяется только величиной нормального ускорения, ![]() которое по модулю равно
которое по модулю равно

и направлено параллельно звену ![]() от точки
от точки![]() к точке
к точке ![]() (центру вращения).
(центру вращения).
Следующая точка—точка ![]() . Ускорение ее складывается из ускорения точки
. Ускорение ее складывается из ускорения точки ![]() и относительного ускорения точки
и относительного ускорения точки ![]() при вращении звена 2 вокруг точки
при вращении звена 2 вокруг точки ![]() . С другой стороны, точка
. С другой стороны, точка ![]() принадлежит звену 3, и ее ускорение складывается то ускорения точки
принадлежит звену 3, и ее ускорение складывается то ускорения точки ![]() и относительного ускорения точки
и относительного ускорения точки ![]() при вращении звена 3 вокруг точки
при вращении звена 3 вокруг точки ![]() . Таким образом, имеем систему двух векторных уравнений
. Таким образом, имеем систему двух векторных уравнений
 ;
;
 .
.
Относительные ускорения ![]() и
и ![]() представим в виде суммы двух составляющих—нормальной и тангенциальной
представим в виде суммы двух составляющих—нормальной и тангенциальной
 ;
;
 .
.
Абсолютные величины нормальных ускорений определяются таким образом
 ;
;
 .
.
Нормальное ускорение![]() направлено вдоль звена
направлено вдоль звена ![]() от точки
от точки ![]() к точке
к точке ![]() (центру вращения), а нормальное ускорение
(центру вращения), а нормальное ускорение![]() — вдоль звена ВС от точки
— вдоль звена ВС от точки ![]() к точке
к точке ![]() (центру вращения).
(центру вращения).
Тангенциальные составляющие ускорений ![]() и
и ![]() по абсолютной величине неизвестны, но известны по направлению. Они направлены перпендикулярно к нормальным составляющим (или перпендикулярно к радиусам вращения).
по абсолютной величине неизвестны, но известны по направлению. Они направлены перпендикулярно к нормальным составляющим (или перпендикулярно к радиусам вращения).
Ускорение точки ![]() —
—![]() нам известно, а ускорение точки С —
нам известно, а ускорение точки С —![]() .
.
Приведя систему к одному уравнению, получим
 .
.
Это уравнение имеет две неизвестные величины и может быть решено графическим методом, путем построения плана ускорений. Для этого выбираем на плоскости произвольную точку![]() — полюс плана ускорений, которая является началам отсчета, и откладываем от нее отрезок
— полюс плана ускорений, которая является началам отсчета, и откладываем от нее отрезок ![]() параллельно звену
параллельно звену ![]() в направлении от точки
в направлении от точки ![]() к точке
к точке ![]() в соответствии со схемой механизма (см рис. 12). Длина этого отрезка изображает на плане ускорений вектор ускорения точки
в соответствии со схемой механизма (см рис. 12). Длина этого отрезка изображает на плане ускорений вектор ускорения точки ![]() -
-![]()
и выбирается произвольно, исходя из удобства размещения на чертеже. Примем длину отрезка ![]() равным 130 мм, тогда масштабный коэффициент плана ускорений будет
равным 130 мм, тогда масштабный коэффициент плана ускорений будет
 .
.
Затем через точку ![]() плана ускорений проводим прямую, направленную вдоль звена
плана ускорений проводим прямую, направленную вдоль звена ![]() в направлении от точки
в направлении от точки ![]() к точке
к точке ![]() , и на ней откладываем отрезок
, и на ней откладываем отрезок
величина, которого в масштабе соответствует величине вектора нормальной составляющей ускорения![]() .
.
Через точку ![]() перпендикулярно к звену
перпендикулярно к звену ![]() (или то же самое, что перпендикулярно
(или то же самое, что перпендикулярно ![]() ) проводим направление вектора тангенциального ускорения
) проводим направление вектора тангенциального ускорения![]() .
.
Строим сумму векторов второй части уравнения. Из полюса (точка ![]() совпадает с полюсом) проводим прямую, параллельную звену
совпадает с полюсом) проводим прямую, параллельную звену ![]() , в направлении от точки
, в направлении от точки ![]() к точке
к точке ![]() и откладываем на плане отрезок
и откладываем на плане отрезок
 ,
,
который в масштабе равен модулю вектора нормального ускорения ![]() .
.
Через точку ![]() перпендикулярно к звену
перпендикулярно к звену ![]() проводим направление вектора тангенциального ускорения
проводим направление вектора тангенциального ускорения![]() .
.
Пересечение двух прямых на плане ускорений, изображающих линии действия тангенциальных ускорений, дает точку ![]() . Соединяя точку
. Соединяя точку ![]() с полюсом плана ускорений
с полюсом плана ускорений ![]() , получим отрезок
, получим отрезок ![]() , соответствующий на плане вектору ускорения точки В механизма, величина которого равна
, соответствующий на плане вектору ускорения точки В механизма, величина которого равна
 .
.
Аналогично этому вектор ![]() , проведенный из точки
, проведенный из точки ![]() в точку
в точку ![]() , на плане ускорения соответствует масштабному выражению вектора полного относительного ускорения
, на плане ускорения соответствует масштабному выражению вектора полного относительного ускорения![]() , абсолютная величина которого равна
, абсолютная величина которого равна
 .
.
Из плана ускорений можно определить по абсолютной величине и тангенциальные составляющие относительных ускорений
 ;
;
 .
.
Для определения ускорения точки ![]() воспользуемся теоремой подобия. Величина отрезка
воспользуемся теоремой подобия. Величина отрезка ![]() может быть найдена из соотношения
может быть найдена из соотношения
 ;
;  .
.
Численная величина абсолютного ускорения точки ![]() механизма равна
механизма равна
 .
.
Определим ускорения центров тяжести звеньев.
Определение ускорений центров тяжести звеньев ![]() ,
, ![]() ,
, ![]() производится на основе использования теоремы подобия. Найдем положения точек центров тяжести на плане ускорения
производится на основе использования теоремы подобия. Найдем положения точек центров тяжести на плане ускорения
 ;
;  ;
;
 ;
;  ;
;
 ;
;  .
.
Соединим полученные точки с полюсом ![]() плана ускорений, тогда вектор
плана ускорений, тогда вектор ![]() будет изображать ускорение центра тяжести соответствующего звена. Абсолютные величины ускорений центров тяжести будут равны
будет изображать ускорение центра тяжести соответствующего звена. Абсолютные величины ускорений центров тяжести будут равны
 ;
;
 ;
;
 ;
;
II. Определение угловых ускорений звеньев механизма
Угловые ускорения звеньев определяются на основе построенного плана.
Звено 1. Ведущее звено 1 вращается равномерно с постоянной угловой скоростью. Следовательно, его угловое ускорение

Звено 2. Абсолютная величина углового ускорения звена
2 может быть получена через тангенциальное ускорение![]() по формуле
по формуле
и направлено против часовой стрелки. Чтобы определить направление углового ускорения ![]() , необходимо вектор относительного тангенциального ускорения
, необходимо вектор относительного тангенциального ускорения ![]() с плана ускорений (на плане ему соответствует вектор
с плана ускорений (на плане ему соответствует вектор ![]() ) перенести в точку
) перенести в точку ![]() механизма, а точку
механизма, а точку ![]() условно закрепить, тогда вектор
условно закрепить, тогда вектор ![]() будет вращать точку
будет вращать точку ![]() звена 2 относительно точки
звена 2 относительно точки ![]() против часовой стрелки, а следовательно, и угловое ускорение будет направлено против часовой стрелки.
против часовой стрелки, а следовательно, и угловое ускорение будет направлено против часовой стрелки.
Звено 3. Угловое ускорение третьего звена определяется аналогично и будет равно
и направлено против часовой стрелки (в этом также легко убедиться, если вектор![]() перенести в точку
перенести в точку ![]() механизма).
механизма).
Направление угловых ускорений для всех звеньев указано на схеме механизма (рис. 9).
Таким образом, основная задача кинематического исследования — определение скоростей и ускорений звеньев механизма — выполнена.
К задаче 2.
Прочтите гл.16 в учебнике [2, стр.143-169] или в любом другом материал, касающийся зубчатых передач:
- виды зубчатых передач и устройство;
- основные параметры эвольвентного колеса (модуль, шаг, толщина зуба, ширина впадины, окружности выступов, впадин, делительная);
- передаточное отношение и передаточное число зубчатой передачи;
- виды зубчатых механизмов (простые и планетарные, редукторы и мультипликаторы, рядовые и ступенчатые);
- передаточное отношение зубчатых механизмов.
Окружная скорость в зацеплении определяется по зависимости  ,
,
где![]() -угловая скорость i-го зубчатого колеса,
-угловая скорость i-го зубчатого колеса,
![]() -диаметр делительной окружности i-го колеса.
-диаметр делительной окружности i-го колеса.
Рассмотрим пример решения задачи 2.
Исходными параметрами для решения задачи являются:
передаточное число  , число зубьев меньшего колеса
, число зубьев меньшего колеса ![]() , модуль зацепления
, модуль зацепления ![]() , угол зацепления
, угол зацепления ![]() , Требуется определить основные параметры зубчатой передачи и построить геометрическую картину нормального эвольвентного зацепления двух зубчатых колес.
, Требуется определить основные параметры зубчатой передачи и построить геометрическую картину нормального эвольвентного зацепления двух зубчатых колес.
I. Определение размеров зубчатого зацепления
Произведем расчет основных параметров зацепления.
Передаточное число зубчатой передачи может быть выражено через количество зубьев колес ![]() .
.
Определим число зубьев второго (большего) колеса
 .
.
Полученное значение ![]() округлим до ближайшего большего, т. е. примем
округлим до ближайшего большего, т. е. примем .
.
Вычислим диаметры начальных окружностей колес
 ,
,
 .
.
Расстояние ![]() между осями двух колес, находящихся в зацеплении, равно сумме радиусов начальных окружностей, или
между осями двух колес, находящихся в зацеплении, равно сумме радиусов начальных окружностей, или
 .
.
Для нормального зубчатого колеса принято, что высота головки зуба равна
 ,
,
а высота ножки зуба

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
