

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
FSO-RF-систем
Из представленных выше гибридных решений наибольшую пропускную способность резервного радиоканала – 100 Мбит/c – имеет модель компании «Лазер Ай-Ти-Си». В то же время, ввиду использования миллиметрового радиодиапазона, данное решение имеет относительно небольшую для гибридов максимальную рабочую дистанцию – всего 2500 м, а его стоимость увеличивается (по сравнению с обычными FSO-системами) почти в два раза. При этом само оборудование представляет собой два раздельных устройства – отдельно оптический блок, и отдельно радиорелейный, что усложняет монтаж всей системы.
Остальные же модели-гибриды, основанные на Wi-Fi технологии, имеют относительно невысокую скорость резервного канала, обычно не превосходящую 20 Мбит/c. Особого внимания заслуживает гибридная система ARTOLINK M1 FE-R производства компании «Мостком», в которой используется специально откалиброванное оборудование на базе Wi-Fi радиомаршрутизаторов RAPIRA (диапазон 5.2 – 5.8 ГГц) со специализированным программным обеспечением. Такое решение обеспечивает полнодуплексную скорость передачи данных в резервном канале до 28 Мбит/с (при канальной скорости 108 Мбит/с), а также возможность плавного снижения скорости и практически отсутствующее время переключения между каналами.
Но в любом случае таких пропускных способностей недостаточно для резервирования высокоскоростного (например, гигабитного) оптического канала связи, что делает проблематичным использование данных решений требовательными операторами связи.
2. Постановка задачи и описание модели
2.1. Постановка задачи
Из всего сказанного выше можно сделать вывод, что, ввиду неоспоримых преимуществ использования гибридных радио-оптических систем передачи данных, разработка таких систем является весьма перспективным направлением в телекоммуникационном секторе – как с технической точки зрения, так и с точки зрения маркетинговой. Тем не менее, на данный момент на рынке представлено лишь небольшое количество моделей гибридного FSO-RF-оборудования, в то время как существующие модели не всегда могут продемонстрировать технические показатели операторского уровня – а именно высокую пропускную способность резервного канала при относительно больших рабочих дистанциях и коэффициенте доступности канала связи.
Это открывает огромный простор для деятельности разработчиков и производителей телекоммуникационного оборудования (в том числе оборудования, основанного на АОЛС-технологии). Одним из первых этапов разработки любой системы передачи данных является модельное исследование этой системы с целью теоретического определения основных технических характеристик будущего телекоммуникационного оборудования. И данная работа затрагивает именно эту проблему.
В работе предлагается описать и исследовать модель гибридной системы передачи данных, основанной на базе лазерной и радио - технологий. При этом предлагается использовать два принципиально разных метода моделирования, а именно:
● математическое моделирование – с использованием методов теории массового обслуживания, а также известных алгоритмов из теории цепей Маркова;
● имитационное (машинное) моделирование – посредством написания специализированной компьютерной программы, имитирующей информационные процессы, происходящие в телекоммуникационной системе.
Целью данного моделирования является определение основных характеристик производительности исследуемой системы, таких как коэффициент доступности канала связи, средняя пропускная способность, доля времени использования резервного канала, средняя длина очереди и среднее время пребывания заявки (пакета данных) в системе, а также выявление зависимостей этих показателей от параметров модели.
2.2. Описание модели гибридной радио-оптической телекоммуникационной системы
Исследуемая модель гибридной радио-оптической системы передачи данных представляет собой систему массового обслуживания (СМО) с двумя возможными скоростями обслуживания (см. рис. 4). Иными словами, система может использовать два режима работы: первый режим (![]() ) – когда передача данных осуществляется по оптическому (основному) каналу, и второй режим (
) – когда передача данных осуществляется по оптическому (основному) каналу, и второй режим (![]() ) – передача данных осуществляется по резервному радиоканалу.
) – передача данных осуществляется по резервному радиоканалу.
Входящий поток заявок в систему – стационарный пуассоновский с параметром ![]() . Число мест для ожидания – неограниченно. При использовании k-й скорости (k-го режима) время обслуживания заявки распределено экспоненциально с параметром
. Число мест для ожидания – неограниченно. При использовании k-й скорости (k-го режима) время обслуживания заявки распределено экспоненциально с параметром ![]() ,
,  . При этом
. При этом  , то есть пропускная способность оптического канала заведомо больше пропускной способности радиоканала.
, то есть пропускная способность оптического канала заведомо больше пропускной способности радиоканала.
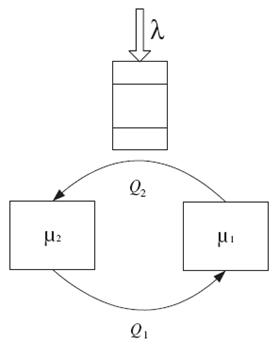
Рис. 4: Модель гибридного канала связи
Время использования k-режима определяется погодными условиями (а именно, метеорологической дальностью видимости – МДВ) в некоторой конкретной местности, где планируется установка исследуемой телекоммуникационной системы. Далее будем полагать, что время использования k-й скорости ограниченно и характеризуется абсолютно непрерывной величиной ![]() , имеющей плотность распределения
, имеющей плотность распределения
![]() ,
,
представляющего собой частный случай гиперэкспоненциального распределения. Такая модель изменения погодных условий была предложена в [5] и основана на опытных наблюдениях, полученных после шести месяцев испытаний в реальных условиях гибридного радио-оптического оборудования модели ARTOLINK М1 FE-2А-R. (Конечно, такие условия, как дальность видимости, изменчивы, тем не менее, общие сезонные тенденции определяются климатической зоной, широтой и другими известными географическими параметрами местности, где планируется установка оборудования.)
Если время первого режима завершается (оптический канал становится недоступным), текущее обслуживание заявки (передача пакета) прерывается и система переходит на второй режим работы (использование резервного радиоканала). Сразу после перехода на второй режим обслуживания передача пакетов не производится. Система должна выждать время ![]() , и если за это время второй режим работы не завершился
, и если за это время второй режим работы не завершился ![]() , то по истечении времени
, то по истечении времени ![]() начинается обслуживание заявки (передача пакета) на второй скорости (по радиоканалу). При этом предполагаем, что заявка, обслуживание которой по оптическому каналу было прервано, обслуживается заново.
начинается обслуживание заявки (передача пакета) на второй скорости (по радиоканалу). При этом предполагаем, что заявка, обслуживание которой по оптическому каналу было прервано, обслуживается заново.
По истечении времени работы второго режима (оптический канал вновь становится доступным) система, продолжая обслуживать заявки во втором режиме (т. е. продолжая передавать пакеты по радиоканалу), отслеживает доступность оптического канала. И если оптический канал доступен в течение некоторого времени ![]() , то по завершении этого времени система начинает использовать первый режим (оптический канал). При этом заявка, в ходе обслуживания которой произошла смена режима, обслуживается заново на новой скорости.
, то по завершении этого времени система начинает использовать первый режим (оптический канал). При этом заявка, в ходе обслуживания которой произошла смена режима, обслуживается заново на новой скорости.
Описанная выше модель включает в себя следующие допущения:
● экспоненциально распределенное время передачи пакета;
● пакеты при переходе с оптического канала на радиоканал не теряются;
● при смене скорости передачи пакета (смене канала передачи данных) текущая передача пакета прерывается и стартует заново на новой скорости.
Также следует отметить, что данная модель не предполагает выбора какой-то конкретной технологии радиопередачи для использования в резервном канале связи – это может быть, например, 802.11a, 802.11g, 802.11n, MMW-стандарты или любая другая технология передачи данных по радиотракту.
3. Математическое моделирование
В данной части предлагается построить и исследовать математическую модель, представляющую собой систему массового обслуживания типа M/M/1 с двумя возможными скоростями обслуживания и описывающую функционирование гибридного канала связи (см. рис. 2). Целью математического моделирования является разработка алгоритма вычисления таких характеристик производительности системы, как стационарное распределение и средняя длина очереди, среднее время ожидания обслуживания, среднее время пребывания заявки в системе.
3.1. Стационарное распределение вероятностей состояний системы
Предположим, что система функционирует в стационарном режиме. Условия существования стационарного режима будут получены позже. Для упрощения дальнейших расчётов предположим также, что время перехода с радиоканала на оптический канал (![]() ) задаётся не фиксированным числом, а экспоненциально распределённой случайной величиной с параметром
) задаётся не фиксированным числом, а экспоненциально распределённой случайной величиной с параметром ![]() .
.
Предполагаем, что обслуживающий прибор может находиться в четырех состояниях:
1 – работа в первом режиме (использование оптического канала);
1’ – переключение с первого режима на второй (с оптического на радиоканал);
2 – работа во втором режиме (использование радиоканала);
2’ – переключение со второго на первый режим (с радиоканала на оптический).
Будем наблюдать поведение системы в моменты завершения обслуживания, а также моменты окончания и смены режимов работы. Обозначим через ![]() – k-й такой момент,
– k-й такой момент, ![]() . Под состоянием системы в момент
. Под состоянием системы в момент ![]() будем понимать вектор
будем понимать вектор
![]()
где ![]() – число заявок в системе в момент времени
– число заявок в системе в момент времени ![]() ,
, ![]() – состояние обслуживающего прибора в момент
– состояние обслуживающего прибора в момент ![]() ,
, ![]() – состояние обслуживающего прибора в момент
– состояние обслуживающего прибора в момент ![]() . Здесь мы полагаем, что состоянию
. Здесь мы полагаем, что состоянию  соответствует завершение обслуживания заявки,
соответствует завершение обслуживания заявки, ![]() .
.
Введем стационарные вероятности состояний системы:
Пусть также

– вероятность того, что за время обслуживания заявки в режиме k в систему поступят i заявок;

– вероятность того, что за время обслуживания заявки в режиме k время использования режима истекает, т. е. оптический канал становится недоступным, если использовался режим 1 (k = 1), или доступным, если использовался режим 2 (k = 2); а за неполное время обслуживания в систему поступят i заявок;

– вероятность того, что время переключения с первого режима на второй меньше ![]() и за время переключения в систему поступят i заявок;
и за время переключения в систему поступят i заявок;

– вероятность того, что время переключения с первого режима на второй больше![]() и за время переключения в систему поступят i заявок;
и за время переключения в систему поступят i заявок;
– вероятность того, что за время обслуживания заявки при переключении со второго режима на первый в систему поступят i заявок;
– вероятность того, что за время обслуживания заявки при переключении со второго режима на первый это переключение завершается, и за неполное время обслуживания в систему поступят i заявок.
Эти вероятности (кроме ![]() , которые заданы явно) могут быть вычислены следующим образом:
, которые заданы явно) могут быть вычислены следующим образом:


Заметим, что за время переключения со второго режима на первый в систему как поступают заявки, так и уходят из нее. Поэтому для удобства будем полагать, что в каждый момент завершения такого переключения с вероятностью
система начинает использовать первый режим работы, а с дополнительной вероятностью  – остается работать во втором режиме. Уточним, что величина
– остается работать во втором режиме. Уточним, что величина ![]() есть вероятность того, что начавшееся время первого режима больше, чем время переключения, и таким образом, с этой вероятностью система может переключиться на первый режим работы.
есть вероятность того, что начавшееся время первого режима больше, чем время переключения, и таким образом, с этой вероятностью система может переключиться на первый режим работы.
Далее, используя введенные выше вспомогательные вероятности, составим уравнения равновесия для стационарных вероятностей  состояний системы для
состояний системы для ![]() :
:
| (1) |
| (2) |
| (3) |
| (4) |
| (5) |
| (6) |
| (7) |
| (8) |

где ![]() – функция-индикатор события
– функция-индикатор события ![]() ,
,

![]()
Заметим, что из системы (1)–(7) можно непосредственно исключить равенства (3), таким образом получим:
| (9) |
| (10) |
| (11) |
| (12) |
| (13) |
| (14) |
| (15) |
где

3.2. Матрично-аналитический метод вычисления стационарных вероятностей
Для вычисления стационарных вероятностей  (за исключением
(за исключением ![]() , которые могут быть легко вычислены по формулам (3)) применим матрично-аналитический подход, который основан на идее сенсорных цепей Маркова. Алгоритмы такого рода изложены в работах [6, 7].
, которые могут быть легко вычислены по формулам (3)) применим матрично-аналитический подход, который основан на идее сенсорных цепей Маркова. Алгоритмы такого рода изложены в работах [6, 7].
Введем в рассмотрение векторы стационарных вероятностей 
Тогда систему уравнений равновесия можно переписать в векторно-матричной форме:
| (16) |
где матрицы ![]() , имеют вид:
, имеют вид:
| (17) |
| (18) |
и для | |
| (19) |
где


![]()
Отметим, что известные алгоритмы, основанные на идее сенсорных цепей Маркова, предполагают, что счетная компонента цепи Маркова, описывающей поведение системы (в нашем случае компонента ![]() цепи
цепи ![]() ), совершает переход не более чем на единицу влево, за один шаг.
), совершает переход не более чем на единицу влево, за один шаг.
Сенсорная цепь Маркова ![]() для цепи
для цепи ![]() строится следующим образом. Значения счетной компоненты
строится следующим образом. Значения счетной компоненты ![]() ограничиваются некоторым фиксированным числом
ограничиваются некоторым фиксированным числом ![]() . Состояние сенсорной цепи совпадает с состоянием цепи
. Состояние сенсорной цепи совпадает с состоянием цепи  , если
, если  . Когда состояние компоненты
. Когда состояние компоненты ![]() цепи
цепи ![]() становится больше, чем
становится больше, чем ![]() , компонента
, компонента ![]() сенсорной цепи принимает значение
сенсорной цепи принимает значение ![]() , а конечные компоненты этой цепи изменяют состояния так же, как и соответствующие компоненты цепи .
, а конечные компоненты этой цепи изменяют состояния так же, как и соответствующие компоненты цепи .
Зафиксируем целое число ![]() и для цепи Маркова
и для цепи Маркова ![]() построим сенсорную цепь
построим сенсорную цепь ![]() с пространством состояний
с пространством состояний  счетной компоненты
счетной компоненты ![]() . Обозначим через
. Обозначим через ![]() матрицы одношаговых вероятностей переходов сенсорной цепи
матрицы одношаговых вероятностей переходов сенсорной цепи  . Нетрудно видеть, что
. Нетрудно видеть, что
![]() .
.
Определим матрицы ![]() при
при ![]() . Для этого необходимо проследить переходы исходной цепи в области
. Для этого необходимо проследить переходы исходной цепи в области  от момента, когда значение компоненты
от момента, когда значение компоненты ![]() стало больше, чем
стало больше, чем ![]() , и до момента, когда
, и до момента, когда ![]() вновь вернется в состояние
вновь вернется в состояние ![]() . Введем обозначение
. Введем обозначение ![]() .
.
Пусть ![]() есть матрица вероятностей переходов конечных компонент цепи Маркова
есть матрица вероятностей переходов конечных компонент цепи Маркова ![]() за время, в течение которого значение счетной компоненты уменьшится с
за время, в течение которого значение счетной компоненты уменьшится с ![]() до
до ![]() ,
, ![]() . Матрицы
. Матрицы  удовлетворяют соотношениям:
удовлетворяют соотношениям:
| (20) |

Анализируя поведение цепи Маркова от момента, когда значение компоненты ![]() становится больше, чем
становится больше, чем ![]() , до момента первого возвращения этой компоненты в состояние
, до момента первого возвращения этой компоненты в состояние ![]() , получаем равенства вида
, получаем равенства вида
| (21) |

для матриц ![]() , полагая в (21)
, полагая в (21) ![]() .
.
Векторы стационарных вероятностей состояний сенсорной цепи ![]() и векторы
и векторы ![]() удовлетворяют одной и той же системе алгебраических уравнений
удовлетворяют одной и той же системе алгебраических уравнений
| (22) |
Эта система имеет ранг ![]() и определяет векторы
и определяет векторы ![]() с точностью до константы, которая может быть определена из условия нормировки.
с точностью до константы, которая может быть определена из условия нормировки.
Далее не будем считать число ![]() фиксированным и для исходной цепи
фиксированным и для исходной цепи ![]() последовательно построим сенсорные цепи с величиной
последовательно построим сенсорные цепи с величиной  . Используя для каждого
. Используя для каждого ![]() уравнение для
уравнение для ![]() системы (22), с учетом обозначения
системы (22), с учетом обозначения ![]() нетрудно получить соотношения:
нетрудно получить соотношения:
| (23) |
где  ,
,
| (24) |
Система уравнений для вектора ![]() составляется из последнего уравнения системы (22) при
составляется из последнего уравнения системы (22) при ![]() и условия нормировки для равенств (23):
и условия нормировки для равенств (23):
| (25) |
В силу того, что матрицы ![]() зависят лишь от разницы
зависят лишь от разницы ![]() , то матрицы
, то матрицы ![]() в (20) не зависят от k (будем полагать, что все
в (20) не зависят от k (будем полагать, что все  ) и определяются как решение матричного уравнения:
) и определяются как решение матричного уравнения:
| (26) |
Уравнение (26) решается итерационно, например, с помощью итерационной схемы:
| (27) |

а матрица G определяется как
![]()
3.3. Условие существования стационарного режима
Для установления условий существования стационарного режима представим рассматриваемую систему как систему с отдыхами обслуживающего прибора, в которой под отдыхом прибора понимается время между моментами, когда завершился первый режим работы до следующего момента, когда система вновь переключилась на первый режим. Заметим, что дисциплина обслуживания заявок в системе – ограниченная (это значит, что время обслуживания очереди ограничено значением случайной величины ![]() ).
).
Для таких систем необходимое и достаточное условие существования стационарного режима получено в работе [8] и имеет вид:
![]()
где  V – средняя длительность отдыха, G – среднее максимальное число заявок, которые могут быть обслужены в очереди между соседними отдыхами. Заметим, что поскольку для системы в [8] обслуживания заявок во время отдыха прибора не производится, а в нашем случае – наоборот, то условие существования стационарного режима будет достаточным.
V – средняя длительность отдыха, G – среднее максимальное число заявок, которые могут быть обслужены в очереди между соседними отдыхами. Заметим, что поскольку для системы в [8] обслуживания заявок во время отдыха прибора не производится, а в нашем случае – наоборот, то условие существования стационарного режима будет достаточным.
Величина G определяется как
 .
.
Найдем теперь среднюю длительность отдыха V:
![]()
где
![]()
– вероятность того, что переключение с первого режима на второй завершилось переходом на второй режим;
 – средняя длительность переключения с первого режима на второй, которое завершилось переходом на первый режим;
– средняя длительность переключения с первого режима на второй, которое завершилось переходом на первый режим;
![]() – средняя длительность переключения с первого режима на второй, которое завершилось переходом на второй режим;
– средняя длительность переключения с первого режима на второй, которое завершилось переходом на второй режим;

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
