Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1. Построение математической модели пьезодвигателя
Принципы действия пьезоэлемента базируются на группе физических эффектов, присущих материалам, способным изменять свои геометрические размеры под воздействием управляющего поля.
Пьезоэлектрическими материалами называют кристаллические вещества, в которых под действием механических напряжений возникает спонтанная поляризация – явление прямого пьезоэлектрического эффекта. Наряду с прямым существует и обратный пьезоэлектрический эффект, заключающийся в том, что внешнее электрическое поле вызывает механические напряжения, которые могут изменять геометрические размеры образца из пьезоэлектрического материала. Связь между механическими и электрическими величинами в обоих случаях линейна.
Уравнение обратного пьезоэффекта:
![]()
![]() деформация пьезоэлемента
деформация пьезоэлемента
первоначальная длинна пластины
механическое напряжение в образце
модуль Юнга
пьезомодуль
напряженность поля
коэффициент мультипликации
Уравнение прямого пьезоэффекта:
поляризованность образца
электрическая постоянная
диэлектрическая восприимчивость пьезоматериала
относительная диэлектрическая проницаемость
![]()
![]()
![]()
![]() Рассмотрим пьезоэлектрический элемент поперечного сечения
Рассмотрим пьезоэлектрический элемент поперечного сечения ![]() So, закрепленный одним концом на неподвижном основании, первоначальный размер lo которого изменяется под действием электрического поля Е в направлении действия поля на значение Δ , и перемещающий исполнительный орган массой mo, сочлененный с его свободным концом. Кроме исполнительного органа перемещаются также элементы объема активной части пьезоэлемента, масса которого mk чаще всего меньше, чем масса исполнительного органа. При этом инерционностями перемещающихся элементарных объемов пьезоэлемента можно пренебречь либо, имея в виду, что пьезоэлемент закреплен одним концом и эта его часть не принимает участия в движении, уточнить значение суммарной приведенной подвижной массы mΣ , включив в нее кроме массы исполнительного органа mo часть массы пьезоэлемента mk. Основное динамическое усилие в рассматриваемом случае действует на пьезоэлемент в направлении приложенного поля. Поэтому для описания пьезоэффектов можно воспользоваться уравнениями (1.1) и (1.2). Умножив все члены уравнения обратного пьезоэффекта на YSo ,получим:
So, закрепленный одним концом на неподвижном основании, первоначальный размер lo которого изменяется под действием электрического поля Е в направлении действия поля на значение Δ , и перемещающий исполнительный орган массой mo, сочлененный с его свободным концом. Кроме исполнительного органа перемещаются также элементы объема активной части пьезоэлемента, масса которого mk чаще всего меньше, чем масса исполнительного органа. При этом инерционностями перемещающихся элементарных объемов пьезоэлемента можно пренебречь либо, имея в виду, что пьезоэлемент закреплен одним концом и эта его часть не принимает участия в движении, уточнить значение суммарной приведенной подвижной массы mΣ , включив в нее кроме массы исполнительного органа mo часть массы пьезоэлемента mk. Основное динамическое усилие в рассматриваемом случае действует на пьезоэлемент в направлении приложенного поля. Поэтому для описания пьезоэффектов можно воспользоваться уравнениями (1.1) и (1.2). Умножив все члены уравнения обратного пьезоэффекта на YSo ,получим:
![]()
(1.3)
![]()
- усилие упругой деформации
![]() - усилие, вызванное электрическим полем
- усилие, вызванное электрическим полем
![]()
- статическое, демпфирующее и динамическое усилия
![]()
![]()
, где Ку –коэффициент упругости
![]() - учитывает жесткость конструкции
- учитывает жесткость конструкции
![]()
Fc - статическое усилие, приложенное к исполнительному органу
![]()
, где Кд – коэффициент внутреннего демпфирования
Воспользуемся выражением для тока смещения в диэлектрике, учитывая что для пьезоэлектрических материалов χ>>1 , запишем:
![]()
(1.4)
Из (1.3):
![]()
(1.5)
Из (1.5) и (1.2):
![]()
Полагая модуль Юнга и диэлектрическую восприимчивость не зависящими от напряженности электрического поля и от механичаской напряженности в пьезоэлементе, получим:
![]() Так как U=Elo – напряжение, приложенное к электродам, то:
Так как U=Elo – напряжение, приложенное к электродам, то:
![]()
(1.6)
![]()
- коэффициент электромеханической связи
Подставим (1.6) в (1.4):
![]()
![]()
- скорость исполнительного органа
![]()
- емкость пьезоэлемента, Ф
![]()
- коэффициент прямого пьезоэффекта, К/м
Подставив результат дифференцирования в (1.4), получим:
![]()
(1.7)
Установим связь между усилием Fэ и электрическим напряжением, приложенным к электродам пьезоэлемента:
![]()
(1.8)
![]()
- коэффициент обратного пьезоэффекта, Н/В
Примем, что заряд пьезоэлемента осуществляется от источника ЭДС еп через эквивалентное внутреннее сопротивление последнего Rвт. Для такой цепи справедливо уравнение:
![]()
(1.9)
Из (1.8) и (1.7):
![]()
![]()
Учитывая (1.9), получим:
![]()
![]()
![]()
(1.10)
Принимая
![]()
,
так как ускорение=Σсил/масса, то:

(1.11)
![]()
(1.12)
Уравнения (1.10), (1.11), (1.12) образуют полную систему дифференциальных уравнений, описывающих пьезоэлемент с исполнительным органом.
 |
Из (1.10):
 |
![]()
Пусть
![]() ,тогда W1 включено последовательно с W2, и можно составить схему:
,тогда W1 включено последовательно с W2, и можно составить схему:
Из (1.11):
![]()
![]()
![]()
![]() Так как
Так как
то:
Объединяя все три схемы, получим:

Или:
Преобразуем схему:
![]()
![]()
![]()
![]()

![]()


![]()
![]()
- электростатическая постоянная времени (инерционность преобразователя).
Пренебрегаем внутренней обратной связью по скорости:
![]()
Для n=100 пьезопластин:

Из этого выражения видно, что в пьезоэлементе кроме демпфирования, обусловленного внутренними диссипативными процессами, имеет место также демпфирование, связанное с прямым пьезоэффектом.
2. Построение математической модели пружины
При построении математической модели привода необходимо учесть влияние пружин, возвращающих рамную конструкцию в первоначальное состояние когда пьезодвигатель сжимается. Пружины представляют собой шесть прямоугольных стальных пластин, по три сверху и снизу пьезодвигателя. Рассчитаем силу с которой пружина, в зависимости от степени сжатия, действует на конструкцию.
Дано:
![]() длина пружины в сжатом состоянии
длина пружины в сжатом состоянии
длина пружины в несжатом состоянии
перемещение
прогиб
Определить:
![]()
Решение:
 |
Так как х – мало по сравнению с длинной пружины, и прогибы близки по значению, то:
![]()
Окончательно имеем:
![]() (2.1)
(2.1)
Из курса сопротивления материалов известно, что
![]()
(2.2), где
![]()
поперечная изгибающая сила, Н;
модуль упругости материала (модуль Юнга), кг/см³;
момент инерции поперечного сечения, см4 ;
Где b=0,04см –ширина, а h=1,97см –высота поперечного сечения пружины.
Связь продольной и поперечной изгибающих сил:
(2.3)
продольная изгибающая сила.
Изменение угла α мало, поэтому им можно пренебречь.
Из 2.2:
![]()
(2.4)
Перемещение нагрузки складывается из перемещения от пьезоэлемента и перемещения от пружины. При сжатии пьезодвигателя пружина возвращает рамную конструкцию в первоначальное состояние.
![]() сила от пружин (т. к. пружин - шесть). (2.5)
сила от пружин (т. к. пружин - шесть). (2.5)
Нагрузка стоит на четырех стальных шариках. Так как нагрузка и платформа стенда выполнены из стали, то коэффициенты трения между нагрузкой и шариками, а так же между шариками и платформой совпадают.
Тогда сумма сил, приложенных к нагрузке:
![]()
(2.6)
![]()
где
масса нагрузки;
ускорение свободного падения;
коэффициенты трения;
масса шариков, она пренебрежимо мала по сравнению с массой нагрузки.
Учитывая это, можно записать:
-сила трения;
- сила тяжести нагрузки.
Из 2.3, 2.4 и 2.5:
3. Модель привода с учетом влияния пружин и сил трения
Данные, полученные эксперементальным путем, а также взятые из технического описания к пьезокерамике:
![]()
![]()
![]()
![]()

![]()
![]()
Полученная модель:
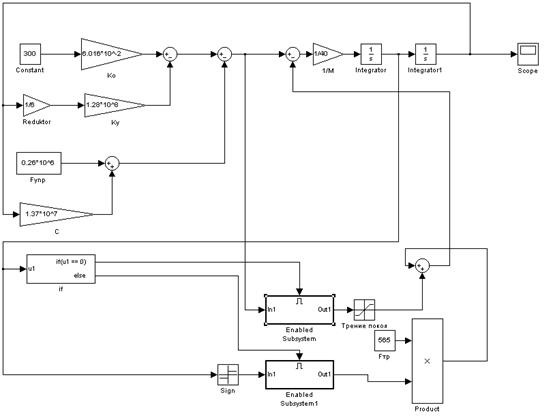
ЛАХ построенной математической модели:

Система неустойчива, требуется введение коррекции.
4. Эксперимент
На специально созданном лабораторном стенде проведен эксперимент, в ходе которого произведены измерения входного и выходного сигналов различных амплитуд и частот. Входной сигнал подавался с генератора сигналов специальной формы, а выходной снимался с датчика перемещений нагрузки. Для примера приведу графики входного и выходного сигнала при амплитуде входного сигнала 1дБ и частотах 0,5 Гц и 13 Гц.
При 0,5 Гц:
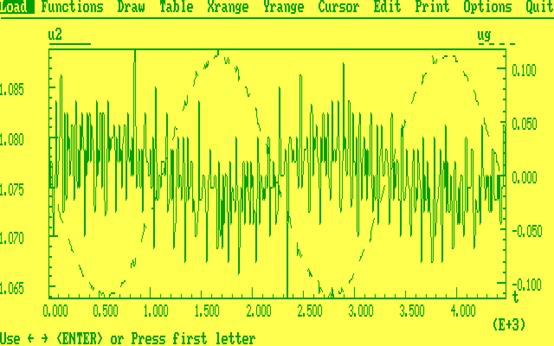
При 13 Гц:

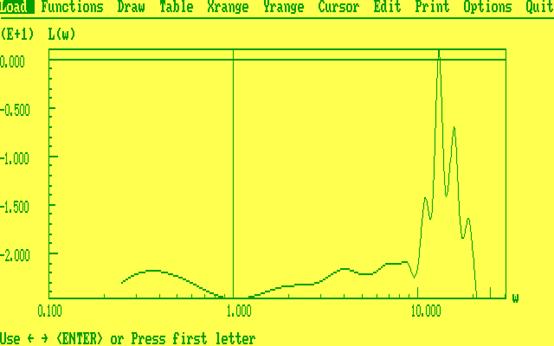
С помощью программы «GR», разработанной в МГТУ им. Баумана на кафедре М-7 и по результатам эксперимента составлены ЛАХ.
Для 1 дБ:
 |
Для 4 дБ:
 |
Для 7 дБ:
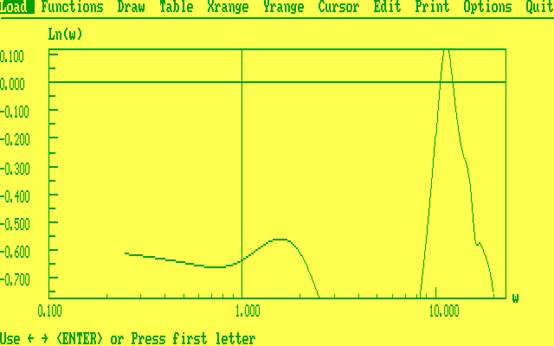 |
Экспериментально полученные характеристики совпадают с инженерной точностью с полученными теоретически.
5. Построение желаемой ЛАЧХ.
Дано:
![]()
![]() -допустимая ошибка
-допустимая ошибка
-рабочая частота
![]() -амплитуда
-амплитуда
![]()
Для области низких частот, где, можно записать

Следовательно
![]()
Отсюда желаемое значение
![]()
Координата рабочей точки:
Желаемая передаточная функция:
![]()
Где К=300 ,
Желаемые ЛАЧХ и ФЧХ
4. Выбор корректирующего устройства.
![]()
![]()
ЛАХ корректирующего устройства:
Корректирующее устройство реализуем программно и замкнем систему с помощью платы ЦАП АЦП L-305. Текст программы приведен в приложении.
ЛАХ системы с коррекцией: