

подключить ЧЧЭ. Если частота в сети равна резонансной частоте LC-контура, то изменения открытия НА не должно быть. При частоте в сети, отличной от резонансной, изменение открытия будет разным при работе гидроагрегата на индивидуальном РЧВ и при работе с использованием РЧВ в качестве следящего устройства (работа в ГРАМ), причем в последнем случае изменение открытия НА должно быть как минимум в два раза меньше, чем при работе на индивидуальном РЧВ. Только в этом случае влияние частоты будет существенно уменьшено.
При наладке схемы "подгонки" ЦР при включении ЭГР-М в ГРАМ нелинейность характеристики обратной связи не имеет существенного значения, поэтому наладка схемы "подгонки" заключается в том, чтобы с помощью Р306 при 50%-ном открытии направляющего аппарата установить -15 В сигнала, посылаемого в схему подгонки ЦР (блок РМЗ).
На базе гидромеханических РЧВ типа УК и РК
6.2.13. Одним из вариантов построения следящего агрегатного устройства на базе РЧВ типа УК и РК является способ воздействия через механизм изменения скорости вращения МИЧ с использованием сопрягающих устройств в виде сумматора усилителя, куда наряду с регулирующим сигналом КТС ГРАМ поступают сигналы обратной связи по положению направляющего аппарата (ДО) и выходу редуктора МИЧ (ДП).
Наладка агрегатного следящего устройства такого типа сводится в основном к обеспечению однозначной зависимости открытия НА от сигнала задания центрального регулятора системы ГРАМ.
Порядок проведения работы:
агрегатные ключи "ГРАМ - индивидуальное" поставить в положение "индивидуальное";
подать напряжение питания на датчики обратной связи и убедиться в согласованности их включения. При воздействии на МИЧ на "прибавить" и последующем открытии НА напряжение датчиков ДО и ДП, а также сумма их напряжений должны возрастать, а при действии МИО на "убавить" - уменьшаться.
При использовании в качестве датчиков ДО и ДП сельсинов типа БД-1404 убедиться, что при полном ходе сервомотора направляющего аппарата от двигателя МИЧ оба датчика поворачиваются на 60°, а диапазон изменения выходного напряжения изменяется линейно от нуля до напряжения ![]() (определяемого выбранным коэффициентом передачи) при полном открытии НА;
(определяемого выбранным коэффициентом передачи) при полном открытии НА;
согласно предварительному расчету установить необходимый коэффициент передачи сигналов обратной связи. При использовании на выходе центрального регулятора однополярного сигнала на вход блока ввода сигналов агрегатного следящего устройства от датчиков обратной связи должен поступать сигнал в том же диапазоне изменения напряжения, но обратной полярности.
6.2.14. Опробование действия следящего устройства от сигнала ЦР:
сервомотор направляющего аппарата с помощью ограничителя открытия установить в положение, соответствующее открытию холостого хода;
установить с помощью ЗМ кнопками "больше", "меньше" на выходе блока РМ1 ноль напряжения (контрольные гнезда 1 и 3);
Проверить, что выход с датчиков обратной связи также равен нулю;
Поставить агрегатный ключ "ГРАМ-индивидуальное" в положение "ГРАМ" и незначительно отвести ограничитель открытия на колонке РЧВ. При этом не должен работать двигатель МИЧ и, следовательно, открываться НА;
установить с помощью ЗМ кнопками "больше", "меньше" на выходе ЦР сигнал, эквивалентный 20%-му открытию НА. Должен работать двигатель МИО и направляющий аппарат открыться также на 20%.
последовательно, ступенями по 20%, открыть направляющий аппарат на 100%. В случае несоответствия открытия НА сигналу задания отрегулировать коэффициент передачи по обратной связи до полного соответствия открытия НА сигналу задания.
Снять прямой и обратный ход зависимости "задание - открытие НА".
6.3. Указания по наладке агрегатных датчиков и сумматоров мощности
6.3.1. Мощность каждого гидроагрегата измеряется датчиком мощности (ДМ). Выходные сигналы ДМ суммируются в стационарном преобразователе измерительном суммирующем (ПИС), образуя сигнал Рф, который используется в качестве главной обратной связи системы ГРАМ.
В качестве датчиков мощности используются измерительные преобразователи активной мощности (ИП), например такие, как Е748Н/1 -2 и Е748У/1 -2, которые предназначены для линейного преобразования измеряемой мощности трехфазных трехпроводных цепей переменного тока частотой 50 Гц в унифицированный входной сигнал постоянного тока 0-5 мА на нагрузке от 0 до 2,5 к (для ИП. Е748/1) и 0±5 мА (для ИП. Е748/2).
Преобразователь измерительный суммирующий (ПИС) производит суммирование унифицированных сигналов постоянного тока Iвх = 5 мА на входе и выработку такого же унифицированного сигнала Iвых = 5 мА на выходе сумматора.
6.3.2. При наладке системы ГРАМ необходимо согласовать выходной сигнал ПИС со входом сумматора фактической мощности КТС ГРАМ (блок РМ6) таким образом, чтобы при ![]() , соответствующем максимальной мощности ГЭС (или группе агрегатов, датчики мощности которых суммируются в данном ПИС), напряжение выхода блока РМ6 равнялось минус 10 В (или той части от минус 10 В, которая пропорциональна мощности группы агрегатов, датчики мощности которых суммируются в данном ПИС). Для этого необходимо подобрать соответствующий резистор R53 в обратной связи микросхемы Д1 (блок РМ6),
, соответствующем максимальной мощности ГЭС (или группе агрегатов, датчики мощности которых суммируются в данном ПИС), напряжение выхода блока РМ6 равнялось минус 10 В (или той части от минус 10 В, которая пропорциональна мощности группы агрегатов, датчики мощности которых суммируются в данном ПИС). Для этого необходимо подобрать соответствующий резистор R53 в обратной связи микросхемы Д1 (блок РМ6),
7. СРЕДСТВА ИСПЫТАНИЙ, ОБРАБОТКА И ОФОРМЛЕНИЕ РЕЗУЛЬТАТОВ
Рекомендации составлены с использованием материалов "Международного кода для испытаний системы регулирования скорости гидравлических турбин".
7.1. При проведении испытаний следует пользоваться прошедшими периодическую проверку приборам класса точности 0,2-1.
7.2. При проведении повторных испытаний следует пользоваться приборами того же типа и класса точности.
7.3. Для определения изменения скорости в переходных режимах мгновенное значение скорости должно записываться прибором с градуированной шкалой времени вместе с ходом сервомотора и другими регулирующими органами турбины. Регистрирующий прибор должен быть малоинерционным, чтобы обеспечивать измерения мгновенных значений скорости.
7.4. Измерения величин должны производиться по сигналу одновременно всеми наблюдателями и через равные интервалы.
7.5. Диапазон изменения измеряемого значения должен приходиться на всю шкалу прибора. Наиболее верные показания прибора приходятся на вторую половину шкалы.
7.6. Микроамперметры и миллиамперметры следует включать в ту часть цепи, которая заземляется. Следует пользоваться микроамперметрами и миллиамперметрами с малым, а вольтметрами - с большим внутренним сопротивлением.
7.7. Неэкранированные приборы не рекомендуется располагать вплотную один к другому, так как один прибор может влиять на магнитное поле другого.
7.8. При различных измерениях должно быть подготовлено достаточное количество удобных для работы протоколов с четким указанием величин, подлежащих измерению. Примерный вид протоколов приведен в приложении 4.
7.9. Погрешность косвенных измерений (например скорость сервомотора направляющего аппарата) определяется по выражению:
d(v) = 
![]() ,
,
где dу и dt - погрешность прямых измерений перемещения у и времени t.
В свою очередь, прямая погрешность измерения определяется, как
dу = ,
,
где dуo - основная погрешность, равная классу точности прибора; определяется по НТД на прибор;
![]() - суммарная дополнительная погрешность СИ от влияющих величин;
- суммарная дополнительная погрешность СИ от влияющих величин;
m - количество влияющих величин, вызывающих дополнительную погрешность.
7.10. Погрешности прямых измерений рассчитываются по метрологическим характеристикам средств измерений СИ, приведенным в НТД, и проводятся через масштаб при графическом построении характеристики к зоне действительных измерений.
Пример определения зоны действительных измерений приводится в приложении 4.
Точки, находящиеся за пределами этой зоны, считаются недействительными. Если более четверти всех измеренных точек попадают за пределы зоны разброса, опыт считается недействительным. Действительных точек должно быть не менее 10.
Приложение 1
ФУНКЦИОНАЛЬНАЯ СХЕМА КТС ГРАМ ГЭС
Система КТС ГРАМ состоит из центрального регулятора (ЦР), формирующего закон регулирования, куда вводятся сигналы от устройств системного и общестанционного регулирования, исполнительных устройств на каждом гидроагрегате и устройств автоматики и защиты.
Центральный регулятор является основным элементом системы ГРАМ, так как в нем формируется закон регулирования, статические и динамические свойства системы, адаптация системы ГРАМ в различных режимах работы.
Выходной сигнал ЦР по радиальной схеме поступает в регуляторы частоты вращения (РЧВ), превращенные в следящие устройства путем охвата системы "РЧВ - направляющий аппарат НА" глубокой жесткой обратной связью (ЖОС) - рис. 4.
Способы этого воздействия могут быть различными и зависят от типа регулятора, установленного на ГЭС.
В том случае, когда на ГЭС установлены электрогидравлические регуляторы, сигнал управления от ЦР вводится непосредственно в ЭГР на постоянном токе (в ЭГР с усилителем на электронной лампе на каждом агрегате устанавливается блок ввода внешних сигналов).
Для сопряжения ЦР с гидромеханическими регуляторами турбин применяются электромеханические блоки привязки с использованием различного типа усилителей и воздействием как непосредственно на побудительный золотник РЧВ, так и через механизм изменения скорости вращения (МИЧВ, МИЧ).
По способу отработки сигнала возможны два варианта воздействия: с обратной связью по открытию ЦР и с обратной связью по суммарной активной мощности генераторов (рис. 4).
Электрическая мощность генераторов Г, измеренная датчиками мощности ДМ, суммируется в сумматоре мощности SР и как обратная связь и по суммарной фактической мощности Рф подается в ЦР, где суммируется (с обратным знаком) с заданной суммарной мощностью Рз ГЭС. В ЦР вводится также сигнал текущего значения частоты fс энергосистемы.
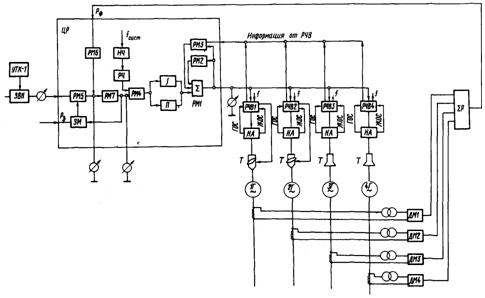
Рис. 4. Функциональная схема системы ГРАМ
Следящая система "РЧВ-НА турбины" и гидроагрегат представляют собой инерционные звенья системы регулирования, а ЦР - пропорционально-интегральный (ПИ) регулятор частоты и мощности. При соответствующих настройках звеньев динамические и статические свойства системы ГРАМ, построенной по такой структурной схеме, определяются параметрами настроек ЦР.
В установившемся режиме при неизменной частоте сети 50 Гц суммарная фактическая мощность Рф равна заданной Рз а на выходе регулятора имеется электрический сигнал, пропорциональный открытию направляющего аппарата. Этот сигнал, поступивший на вход каждого РЧВ, выключается жесткой обратной связью РЧВ.
Таким образом, равенство открытий направляющих аппаратов гидроагрегатов зависит от точности настройки коэффициентов передачи в агрегатном следящем устройстве. Равенство мощностей гидрогенераторов при этом обеспечивается при идентичности характеристик агрегатов "открытие - мощность" и комбинаторных зависимостей для ПЛ-турбин.
При изменении Рз выход ЦР изменяется по ПИ-закону, а агрегатные следящие устройства отслеживают это изменение с постоянной времени инерционного звена. Изменение мощности агрегатов происходит до тех пор, пока суммарная фактическая мощность Рф отличается от заданной Рз. Если при равенстве Рф и Рз происходит изменение частоты сети, то соответственно изменяется выход регулятора и мощность гидроагрегатов. Изменение мощности агрегатов происходит в сторону восстановления частоты и одновременно изменяется Рф. Равновесное состояние наступает, когда сигнал от изменения частоты уравновешивается сигналом от изменения Рф. При этом частота в сети устанавливается отличной от исходной, а Рф не соответствует Рз. Соотношение установившегося значения частоты и фактической мощности определяется заданной уставкой статизма ЦР.
В ЦР от каждого РЧВ вводится информация о включении гидроагрегата в ГРАМ. Поскольку обратная связь в схеме ГРАМ осуществляется по сумме фактических мощностей всех агрегатов - как включенных, так и не включенных в систему ГРАМ, то заданная мощность поддерживается неизменной вне зависимости от количества агрегатов, включенных в ГРАМ, и при изменении мощности агрегата, не включенного в ГРАМ.
Приложение 2
ФУНКЦИОНАЛЬНАЯ СХЕМА ЦЕНТРАЛЬНОГО РЕГУЛЯТОРА
Функциональная схема ЦР представлена на рис. 5. Задатчик мощности ЗМ является статическим устройством с большим временем запоминания выходного сигнала. Управляемый делитель УД, на котором суммируются сигналы сумматоров заданной СЗ и фактической СФ мощности, имеет входы от блока релейного автоматического управления БРАУ, воздействующего так, что его коэффициент передачи автоматически изменяется обратно пропорционально количеству агрегатов ГЭС, работающих в активном режиме, управление которыми осуществляется от системы ГРАМ.
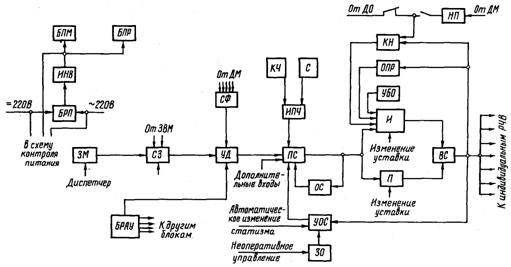
Рис. 5. Функциональная схема ЦР системы ГРАМ
Изменение статизма производится регулированием крутизны выходного сигнала измерителя преобразователя частоты (ИПЧ). Благодаря этому изменение уставки статизма не влияет на коэффициент передачи по мощности и следовательно, на динамическую настройку контура обработки заданной мощности ГЭС. Ввод сигнала отклонения частоты после УД обеспечивает постоянство статизма агрегата по частоте при изменении количества гидроагрегатов, подключенных к ГРАМ.
Автоматическое изменение коэффициента передачи промежуточного сумматора ПС, осуществляемое в устройстве обратной связи ОС, обеспечивает пропорциональное изменение постоянной времени интегрирования и коэффициента пропорционального воздействия ПИ-регулятора динамических настроек системы ГРАМ при изменении режима работы ГЭС (например при выделении ГЭС на изолированный район), сохраняя устойчивую работу ГЭС в изменившихся условиях.
Центральный регулятор снабжен цепями отработки ЗМ разности между уставкой на ней и фактической мощностью ГЭС (автоматическая подгонка или перекладка). Схема используется, например, при включении ЦР в работу для согласования задания с мощностью подключаемых к системе ГРАМ агрегатов или для изменения задания при отключении одного или нескольких гидроагрегатов системной автоматикой для предотвращения перегрузки линий электропередачи.
Регулятор снабжен ограничителями верхнего и нижнего пределов выходного сигнала (ОПР) с возможностью плавного изменения уставки ограничения и сигнализацией исчерпания регулировочного диапазона.
При срабатывании цепей быстрого отвода регулятора (УБО) выходной сигнал ЦР увеличивается до уставки верхнего ограничения. Чтобы включение группового регулятора в работу не вызывало толчка нагрузки, предусмотрен компаратор напряжения КН для согласования выходного сигнала ЦР с фактическим открытием направляющего аппарата турбины.
На вход КН может подаваться либо непосредственно сигнал от датчика открытия ДО направляющего аппарата турбины турбин, либо выходной сигнал нелинейного преобразователя НП "мощность-открытие".
В аппаратуре КТС ГРАМ ГЭС предусмотрены устройство и коммутирующие элементы для обеспечения режима работы ГЭС при ее делении на несинхронные части. Для этого СФМ состоит из двух суммирующих элементов, что создает возможность перехода в несинхронный режим группы агрегатов без толчка нагрузки.
При необходимости осуществлять автоматическое групповое регулирование каждой из разделившихся частей ГЭС предусматривают установку дополнительного группового регулятора, который в нормальном режиме следит за основным ЦР, а при делении ГЭС подключается к отделившейся группе и осуществляет автоматическое групповое регулирование выделившихся агрегатов. При определенных условиях может осуществляться перевод отделившихся агрегатов на индивидуальное регулирование.
Аппаратурой КТС ГРАМ допускается режим работы с обратной связью по среднему открытию. Для этого используются усилитель обратной связи УОС с входом для автоматического изменения статизма по среднему открытию и потенциометрический (неоперативный) задатчик открытия 30.
Когда режим работы группового регулятора с обратной связью по среднему открытию является основным, в качестве оперативного задатчика используется ЗМ. Для этого он должен быть переключен на дополнительный вход промежуточного сумматора ПС.
Работа в режиме регулирования частоты и мощности
Функциональная схема регулятора в режиме регулирования мощности со статизмом по частоте представлена на рис. 6.
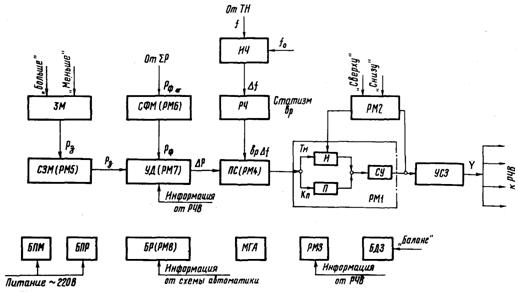
Рис. 6. Функциональная схема ЦР
Сигнал от задатчика мощности ЗМ через сумматор заданной мощности СЭМ (обозначенной на регуляторе как блок РМ5) поступает в управляемый делитель УД (РМ7), где суммируется с сигналом фактической мощности. Сигнал фактической мощности поступает от сумматора (тип Е831/2) через блок сумматора фактической мощности СФМ (РМ6), служащий для согласования токовых цепей сумматора с высокоомным входом УД (РМ7).
В УД поступает также информация от РЧВ агрегатных исполнительных устройств о включении агрегата в ГРАМ или его отключении. С учетом этой информации сигнал разности суммарной заданной мощности Рз и суммарной фактической мощности Рф преобразуется в УД в отклонение мощности на один агрегат DР. Этим достигается неизменность динамических свойств системы ГРАМ не зависимо от количества включенных в нее агрегатов.
Сигнал отклонения (изменения) мощности в промежуточном сумматоре ПС (РМ4) суммируется с отклонением частоты от заданной уставки с учетом заданного статизма.
Сигнал отклонения частоты от заданной уставки fo формируется в блоке измерителя частоты ИЧ в виде Df. В промежуточном сумматоре ПС сигналы DР и bрDf cуммируются (с разным знаком) и, если DР = bрDf, то на выходе ПС будет ноль и регулятор не действует. Это значит, что отклонение частоты в сети компенсировано отклонением фактической мощности от заданной и система регулирования с объектом находятся в равновесном состоянии согласно статической характеристике. При изменении нагрузки в энергосистеме и, следовательно, частоты происходит изменение Df и на выходе ПС появляется сигнал, который поступает в блок (РМ1), содержащий интегратор И и пропорциональный усилитель П, включенные параллельно. Эти сигналы, пройдя сумматор-усилитель блока РМ1, поступают в блок суммирующего - запоминающего устройства (УСЗ), используемого, в частности, как усилитель мощности выходного сигнала регулятора.
Так как выходной сигнал регулятора выключается в агрегатных следящих устройствах сигналом открытия направляющего аппарата, то выходной сигнал ЦР следует считать пропорциональным среднему открытию Y направляющих аппаратов гидроагрегатов.
Динамическая характеристика регулятора определяется динамическими свойствами звена РМ1 и подчиняется ПИ-закону регулирования, который характеризуется коэффициентом передачи пропорциональной части Кп и постоянной времени интегрирования Ти. Если на входе ПИ звена (на выходе ПС) есть сигнал, то на выходе регулятора сигнал открытия Y изменяется до тех пор, пока по обратной связи изменение мощности и частоты не придут в соответствие с DР = bрDf, т. е. пока сигнал на входе в РМ1 не станет равным нулю. При регулировании частоты по статической характеристике равенство Рз = Рф возможно только при f = fo (Df = 0), т. е. фактическая мощность соответствует заданной только при частоте сети, соответствующей заданной корректором частоты fо (уставке).
Режим регулирования по системному параметру.
Системное регулирование от ЗВН
Структура системы ГРАМ и центрального регулятора, в частности в режиме регулирования по системному параметру в схеме с обратной связью по суммарной фактической мощности, остается такой же, что и при работе в режиме задания мощности со статизмом по частоте (рис. 4).
Задание внеплановой нагрузки, формируемое на верхнем уровне (в ОДУ, ОЭС) через передающую аппаратуру телемеханики УТК, аппаратуру уплотнения поступает в виде кодоимпульсного сигнала в приемник УТК, где преобразуется в сигнал постоянного тока ±5 мА. Сигнал с УТК поступает далее на вход сумматора-усилителя задатчика внеплановой нагрузки ЗВН.
Задатчик представляет собой следящее запоминающее устройство, состоящее из сумматора-усилителя и интегратора, охваченных жесткой отрицательной обратной связью.
Сигнал ЗВН поступает на один из дополнительных входов сумматора задаваемой мощности РМ5 центрального регулятора.
На вход ХТ1:20 подключается интегральная составляющая, а на вход ХТ1:21 пропорциональная составляющая сигнала задания внеплановой нагрузки. При этом плановое задание нагрузки осуществляется задатчиком мощности центрального регулятора.
Регулирование по системному параметру с отработкой по выходу ЦР
На ряде гидроэлектростанций в Кольской энергосистеме отработка сигнала задания системы ГРАМ производится не по суммарной фактической мощности, а по открытию ЦР. В этом случае структура ЦР отлична от структуры при отработке сигнала задания по суммарной мощности и принимает вид, представленный на рис. 7, а, где блок РМ6 не используется, блок РМ7 выполняет роль не управляемого делителя УД, а согласующего усилителя.
При переводе системы в режим "системное регулирование" также происходит изменение структуры системы ГРАМ (рис. 7, б). Срабатывает реле режимов и производит следующие операции:
отключает выходной сигнал ИЧ и согласующего усилителя РМ7 от промежуточного сумматора РМ4;
подключает выход согласующего усилителя РМ7 к компаратору задатчика мощности и переводит тем самым ЗМ в режим слежения за выходом РМ7;
подключает сигнал системного параметра (выход КТР или УТК) на вход промежуточного сумматора РМ4 (зажим ХТ1:13).

Рис. 7. Функциональная схема ЦР системы ГРАМ с отработкой по открытию ЦР
Системный параметр вырабатывается на ЦДП энергосистемы и представляет собой пропорционально-интегральную функцию отклонений частоты и перетока обменной мощности, и он передается по каналам телемеханики через устройства УТК или КТР в схему ЦР. С помощью УТК или КТР производится как непрерывное регулирование (в заданном регулировочном диапазоне) системного параметра, воздействующего на ЦР и далее на РЧВ гидротурбин, так и дискретно путем передачи сигналов телеуправления на изменение положения командо-аппарата КА системы и, следовательно, на включение (отключение) в определенной очередности гидроагрегатов ГЭС.
Задачей КА, кроме того, является ввод коррекции уставки заданной средней мощности и изменение статизма по сигналу группового регулирования от значения "системного параметра" и числа гидроагрегатов ГЭС, работающих в системе ГРАМ.
Работа ЦР в режиме астатического регулирования частоты
Центральный регулятор переводится в режим астатического регулирования частоты воздействием на блок реле БР (РМ8). При этом (рис. 8) выход УД (РМ7) переключается на один из входов ЗМ, а интегратор последнего переключается на работу как компаратор, ликвидирующий разницу между Рз и Рф (DР = 0). ЗМ работает как компаратор (безынерционное звено), поэтому слежение Рз за Рф происходит практически мгновенно и переход обратно в режим регулирования частоты со статизмом происходит без толчка (без изменения выходного сигнала ЦР).
Поскольку в режиме астатического регулирования сигнал DР, вырабатываемый в УД (РМ7), отключается от промежуточного сумматора ПС (РМ7), отключается от промежуточного сумматора ПС (РМ4) контактами реле К25, то на вход регулятора мощности РМ1 поступает только сигнал отклонения частоты Df от уставки. Процесс регулирования заканчивается, когда Df = 0, и частота соответствует заданной корректором fо, а в системе устанавливается баланс генерируемой и потребляемой мощности в соответствии с этой частотой.
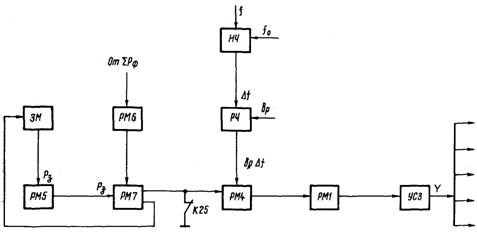
Рис. 8. Функциональная схема ЦР в режиме астатического регулирования
Работа ЦР в режиме "подгонки"
В режиме включения в систему ГРАМ первого агрегата (режим "подгонки" - см. рис. 9) ЗМ так же, как и в случае астатического регулирования, включен в режим слежения за УД (РМ7), т. е. за фактической мощностью, а сигнал рассогласования на выходе УД, появляющейся в процессе отслеживания, отключается от промежуточного сумматора ПС (РМ4) контактом реле К25.
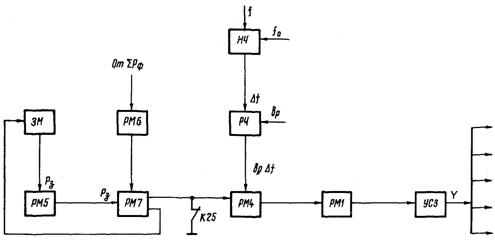
Рис. 9. Функциональная схема ЦР в режиме "Подгонка"
Так как выход регулятора на агрегатные следящие устройства еще не подключен и воздействия от ЦР на агрегаты нет, то даже при незначительном сигнале на входе РМ1 интегратор меняет выход Yв в одно из крайних положений. Чтобы сделать выход ЦР вполне определенным и включить в ГРАМ агрегат без толчка, интегратор РМ1 охватывается глубокой обратной связью - компаратором РМ3, на вход которого подаются сигналы с выхода РМ1 и с датчика открытия ДО (напряжение пропорциональное открытию направляющего аппарата подключаемого агрегата). В этом случае выход ЦР (Y) соответствует текущему значению открытия НА), а мощность Рз равна Рф, поэтому включение агрегата в ГРАМ происходит без толчка открытия и мощности.
Приложение 3
ФУНКЦИОНАЛЬНЫЕ СХЕМЫ АГРЕГАТНЫХ СЛЕДЯЩИХ УСТРОЙСТВ
Одной из задач, возникающих при наладке системы ГРАМ на ГЭС, является согласование центрального устройства системы с индивидуальными РЧВ. Ввиду того, что ГЭС оборудованы различными типами регуляторов частоты вращения, элементы привязки также отличны. Поэтому с точки зрения согласования и привязки РЧВ к КТС ГРАМ, функциональные схемы электрогидравлических регуляторов по типу РЧВ можно разделить на три группы:
ЭГР - на ламповых усилителях;
ЭГР-М, (ЭГР-2М) - на магнитных усилителях;
ЭГР-1Т и ЭГР-2И1 - на транзисторах и интегральных микросхемах.
Функциональная схема агрегатного следящего устройства на базе РЧВ типа ЭГР-1Т ("Ритм")
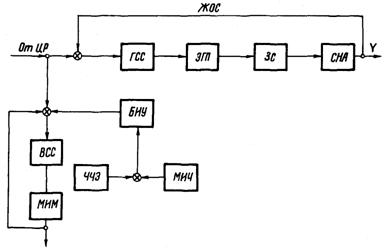
Рис. 10. Функциональная схема агрегатного следящего устройства на базе РЧВ типа ЭТР-1Т "Ритм"
При включении в ГРАМ функциональная схема регулятора ЭГР-1Т принимает вид, представленный на рис. 10.
Сигнал от ЦР поступает непосредственно в сумматор главной следящей системы ГСС, где и выключается жесткой обратной связью ЖОС после обработки его электрогидравлическим преобразователем ЭГП, золотниковой системой ЗС и сервомотором направляющего аппарата СНА. Таким образом, каждому значению Y от -10 до +10 В) выходного сигнала ЦР соответствует Y (0-100%) открытия направляющего аппарата.
При включении агрегата в ГРАМ в его РЧВ частоточувствительный элемент (ЧЧЭ), механизм изменения частоты (МИЧ), блок интегрирующего усилителя (БИУ) со стабилизирующими элементами отключаются от главной следящей системы (ВСС). Вспомогательная следящая система регулятора частоты вращения турбины, включенной в систему ГРАМ, выполняет функции следящего устройства за сигналами от ЦР и БИУ, содержащего сигнал отклонения частоты и уставки МИЧ.
В статике выходной сигнал МИМ должен быть алгебраической сумме сигналов от ЖОС и БИУ, поэтому при включении на вход ГСС сигнала от МИЧ и БИУ (и отключении сигнала ЦР) изменений открытия НА не должно происходить.
Функциональная схема агрегатного следящего устройства на базе РЧВ типа ЭГР-М (ЭГР-2М)
Регулятор частоты вращения ЭГР-М (ЭГР-2М) не предназначен к использованию в схеме ГРАМ с ЦР. В нем не предусмотрено заводской схемой (в отличие от РЧВ типа ЭГР-1Т) отключение изодрома и частоточувствительного элемента (ЧЧЭ) при включении гидроагрегата в систему ГРАМ.
Суммирование сигналов от ЦР, ЖОС, изодрома И и ЧЧЭ производится в магнитной системе магнитного усилителя (МУ), представляющего собой инерционное звено, что ограничивает параметры по входам ЖОС и ЦР.
Следящее агрегатное устройство на базе ЭГР-М, ЭГР-2М представляет собой (рис. 11) менее совершенную схему, чем на базе РЧВ ЭГР-1Т.
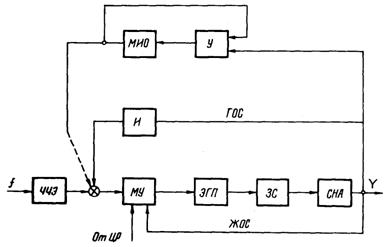
Рис. 11. Функциональная схема агрегатного следящего устройства на базе РЧВ типа ЭГР-М (ЭГР-2М)
Отклонение частоты от номинальной (от резонансной LС-контура) вызывает изменение открытия направляющего аппарата от заданного по входу от ЦР на значение, пропорциональное разности коэффициентов передачи магнитного усилителя по входам от частоты и ЖОС. Следовательно, чтобы ошибка в слежении за сигналом ЦР была минимальной, статизм следящей системы должен быть максимальным, т. е. уровень сигнала по ЖОС должен быть значительно больше уровня сигнала по входу от частоты. Поскольку коэффициент передачи по входу от частоты вполне определен, а увеличение коэффициента передачи по ЖОС ограничено с одной стороны уровнем сигнала от ЦР и устойчивостью контура МУ-ЭГП-ЭС-СНА-ЖОС с другой стороны, то практически увеличение статизма следящей системы возможно до уровня 15-20%, что оказывается достаточным для создания вполне приемлемой точности агрегатного следящего устройства.
Одним из недостатков следящей системы на базе ЭГР-М является осуществление схемы слежения механизма изменения частоты (МИЧ) только за действительным открытием НА. При этом МИЧ отслеживает сигнал ЦР со статизмом 20%, а при отключении ГРАМ на вход МУ включается обратная связь с установленным на индивидуальном регулировании статизмом (от 2 до 10%). Следовательно, при отклонении частоты от резонансной после отключения от ГРАМ должно происходить изменение открытия НА.
Для уменьшения влияния частоты на равенство открытий направляющих аппаратов в следящих системах необходимо обеспечить идентичность характеристик РЧВ и увеличить абсолютное значение статизма.
Функциональная схема агрегатного следящего устройства на базе РЧВ ЭГР на ламповом усилителе (рис. 12)
Для привязки ЦР системы ГРАМ к регуляторам турбин применяется так называемый блок ввода сигнала БВО (рис. 13). Он состоит из трансформатора питания ТП, выпрямителя В, параметрического стабилизатора напряжения R1, V1, V2, представляющих собой источник питания для усилителя V3; усилителя мощности V4, V5 и датчика обратной связи от направляющего аппарата.
Выходной сигнал напряжения постоянного тока ЦР системы ГРАМ подается на V3.
Туда же подают сигнал обратной связи от ДО направляющего аппарата. Выходной сигнал усилителя подается через реле Р на управляющую сетку электронной лампы.
Усилитель V3 охвачен регулируемой обратной связью (R5).
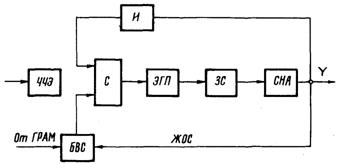
Рис. 12. Функциональная схема агрегатного следящего устройства на базе ЭГР на ламповом усилителе
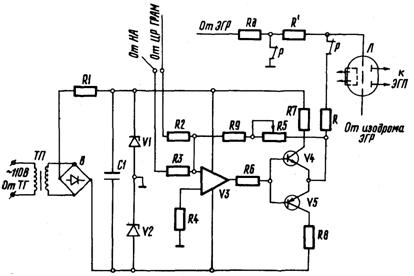
Рис. 13. Блок ввода сигналов для агрегатного следящего устройства на базе ЭГР на ламповом усилителе
Сигналы от выявительной части ЭГР в режиме группового регулирования на лампу не поступают, так как через Rдоб и контакт реле Р группового регулирования они замыкаются на общую точку схемы.
Функциональная схема агрегатного следящего устройства на базе гидромеханических РЧВ типа УК и РК
В эксплуатируемых схемах ГРАМ с использованием РЧВ гидромеханического типа применяются в основном два вида следящего устройства:
с воздействием регулирующего сигнала на гидромеханические регуляторы гидротурбин через их механизм изменения скорости вращения МИО с использованием сопрягающих устройств в виде усилителей (магнитных, транзисторных);
с воздействием регулирующего сигнала на электромеханический блок с последующим преобразованием этого сигнала с помощью гидроусилителя в непосредственное перемещение рычажной системы и побудительного золотника регулятора параллельно ограничителю открытия.
Из рассмотрения функциональной схемы следящего устройства первого типа (рис. 14) видно, что сигнал задания ЦР по мере изменения открытия направляющего аппарата должен выключаться суммой сигналов обратной связи по положению открытия НА (ДО) и выходу редуктора МИЧ (ДП), на исполнительный двигатель которого непосредственно воздействует сигнал задания. Задачей наладки следящего устройства этого типа является подбор соотношения сигналов обратной связи по ДО и ДП и согласование их по уровню и полярности с сигналом задания от ЦР, изменяющегося в диапазоне от -10 до +10 В.
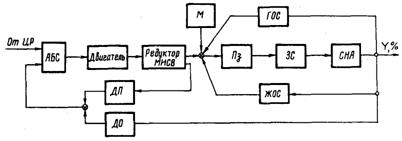
Рис. 14. Функциональная схема агрегатного следящего устройства на базе РЧВ типа УК, РК
В случае использования в качестве датчиков обратной связи сельсинов БД-1404Б следует учитывать, что наибольшая линейность выходной характеристики сельсинов обеспечивается в зоне ±30° поворота их роторов. Поскольку на полный ход направляющего аппарата вал-выключатель в колонке РЧВ поворачивается на 60°, а выходной вал редуктора МИЧ (дополнительный выход с которым стыкуется ДП) на 120°, то привязку сельсинов датчиков ДО и ДП к указанным элементам РЧВ следует выполнить с передачей 1:1 и 2:1 соответственно.
Напряжение, снимаемое с датчиков ДО и ДП, выпрямляется, сглаживается и в виде однополярного сигнала подается в агрегатный блок сопряжения (АБС), представляющий собой сумматор-усилитель, собранный на операционном усилителе.
Суммарный коэффициент передачи по обратной связи должен быть выбран таким, чтобы 100% задания выключалось сигналом обратной связи, возникающим при полном открытии регулирующих органов турбины.
Установка двух датчиков обратной связи обусловлена необходимостью:
обеспечения наибольшего быстродействия следящей системы в схеме с воздействием на МИЧ при сохранении устойчивости процесса регулирования;
создания приемлемого статизма по частоте, чтобы в значительной мере уменьшить влияние изменения частоты на РЧВ агрегата при работе его в схеме ГРАМ.
Для исключения влияния изменения частоты сети на распределение нагрузки между агрегатами при работе их в системе ГРАМ статизм агрегатного следящего устройства на базе РЧВ типа УК и РК равен сумме значений статизма собственно РЧВ и статизма, обусловленного соотношением электрических сигналов датчиков обратной связи ДО и ДП:
bz = bPЧВ + bЭЛ = bPЧВ + ![]() К.
К.
Испытания показывают, что при сохранении общего суммарного сигнала, снимаемого с датчиков обратной связи (определяемого выбранным коэффициентом передачи по ОС), отношение ![]() сигналов датчиков, обеспечивающие необходимый статизм, должно быть порядка 1,2-1,4.
сигналов датчиков, обеспечивающие необходимый статизм, должно быть порядка 1,2-1,4.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
