


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
- Бесконтактность и отсутствие узлов, требующих техобслуживания;
- Возможность использования во взрывоопасной и агрессивной среде;
- Большая перегрузочная способность по моменту;
- Высокие энергетические показатели (КПД более 90 %).
Перспективны также в отдельных областях также вентильно – индукторные двигатели
Вентильно–индукторный двигатель – это относительно новый тип электромеханического преобразователя энергии, который сочетает в себе свойства и электрической машины, и интегрированной системы регулируемого электропривода. Как всякий электродвигатель, он обеспечивает преобразование электрической энергии, которая поступает от питающей сети, в механическую энергию, передаваемую в нагрузку. Как система регулируемого электропривода, ВИД дает возможность осуществлять управление этим процессом в соответствии с особенностями конкретной нагрузки: регулировать частоту вращения, момент, мощность и так далее.
В состав ВИД входят: индукторная машина (ИМ), преобразователь частоты, система управления и датчик положения ротора. Функциональное назначение этих элементов ВИД: преобразователь частоты обеспечивает питание фаз ИМ однополярными импульсами напряжения прямоугольной формы; ИМ осуществляет электромеханическое преобразование энергии, система управления в соответствии с заложенным в нее алгоритмом и сигналами обратной связи, поступающими от датчика положения ротора, управляет данным процессом.
По своей структуре ВИД ничем не отличается от классической системы регулируемого электропривода. Именно поэтому он и обладает всеми ее свойствами. Однако в отличие от регулируемого электропривода, например с асинхронным двигателем, она принципиально неспособна работать без преобразователя частоты и системы управления. Преобразователь частоты и система управления являются неотъемлемыми частями ИМ, необходимыми для осуществления электромеханического преобразования энергии. Т. о. совокупность структурных элементов является не только системой регулируемого электропривода, но и электромеханическим преобразователем энергии.
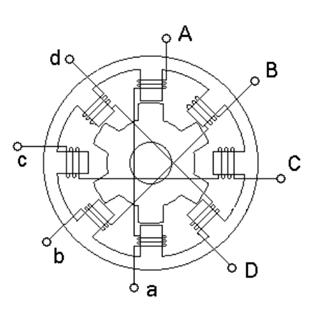
Рис. 1.5. Поперечное сечение 4х–фазной ИМ конфигурации 8/6.
На рис.1.5, для примера, приведено поперечное сечение 4х–фазной ИМ конфигурации 8/6. При обозначении конфигурации ИМ первая цифра указывает число полюсов статора, вторая – ротора. При обозначении конфигурации ИМ первая цифра указывает число полюсов статора, вторая – ротора. Машина может иметь различные конструктивные исполнения.
Анализ рис. 1.5 показывает, что ИМ имеет следующие конструктивные особенности.
– Сердечники статора и ротора имеют явнополюсную структуру.
– Число полюсов относительно невелико. При этом число полюсов статора больше числа полюсов ротора.
– Сердечники статора и ротора выполняются шихтованными.
– Обмотка статора – сосредоточенная катушечная. Она может быть одно - или многофазной.
– Фаза ИМ, как правило, состоит из двух катушек, расположенных на диаметрально противоположных полюсах статора.
– Катушки фазы могут быть соединены в электрическом отношении параллельно или последовательно; в магнитном – согласно или встречно.
– Обмотка на роторе ИМ отсутствует.
Конструктивно ИМ, преобразователь частоты и система управления в ВИД могут быть выполнены раздельно. При этом в процессе работы они могут находиться на достаточно большом удалении друг от друга.
В последние время в мире наблюдается устойчивая тенденция выполнения преобразователя частоты и двигателя в системе регулируемого электропривода в одном корпусе. Такое конструктивное исполнение в англоязычной литературе получило название combimaster, что на русский язык может быть переведено как электропривод интегрального исполнения.
В ВИД интегральное исполнение преобразователя частоты и ИМ является более выгодным по сравнению с частотно–управляемым асинхронным приводом. Дело в том, что в отличие от асинхронной, фазы индукторной машины электрически не связаны между собой. Таким образом, если для соединения 3х–фазного асинхронного двигателя с преобразователем частоты требуется три провода, то для 3х–фазной индукторной машины – шесть. Очевидно, что увеличение числа фаз ведет к увеличению числа соединительных проводов. Следовательно, использование интегрального исполнения ВИД позволяет существенно снизить расход соединительных проводов или кабелей.
ВИД является и электрической машиной, и интегрированной системой регулируемого привода. Он представляет собой органическое единство ИМ, преобразователя частоты и микропроцессорной системы управления. Поэтому все его достоинства и недостатки можно разделить на две группы:
– обусловленные ИМ;
– обусловленные преобразователем частоты и системой управления;
Достоинства обусловленные ИМ:
– простота и технологичность конструкции ИМ;
– низкая себестоимость;
– высокая надежность;
– высокая ремонтопригодность;
– низкие потери в роторе;
– минимальные температурные эффекты;
– низкий момент инерции;
– возможность работы на больших частотах вращения;
– возможность работы в агрессивных средах;
– высокая степень утилизации.
Недостатки обусловленные ИМ:
– высокий уровень шумов и вибраций;
– плохое использование стали;
– работа возможна только совместно с преобразователем частоты;
– значительные отходы при штамповке;
Достоинства обусловленные вентильным преобразователем:
– возможность оптимального управления процессом электромеханического преобразования энергии для конкретного нагрузочного устройства;
– высокие массо-габаритные и энергетические характеристики.
Недостатки обусловленные вентильным преобразователем:
– пониженная электросовместимость с сетью из-за высокого содержания высших гармоник в токах обмоток.
Наиболее целесообразно использовать ВИД в качестве электропривода механизмов, в которых по условиям работы требуется осуществление регулирования в широком диапазоне частоты вращения. Примером здесь могут быть электроприводы станков с числовым программным управлением и промышленных роботов.
Эффективность использования ВИД существенно повышается, если необходимость регулирования частоты вращения сочетается с тяжелыми условиями работы, как это имеет место быть в электроприводах для металлургии, горнодобывающей промышленности и подвижного состава электрического транспорта.
В промышленности есть большой класс устройств и механизмов, использующих нерегулируемый электропривод, где энергетическая эффективность существенно возрастает при использовании регулируемого электропривода. К ним относятся компрессоры, насосы и вентиляторы. Применение ВИД здесь является весьма перспективным.
Не менее перспективно применение ВИД в бытовой технике: стиральных машинах, пылесосах, кухонных комбайнах.
ВИД представляет собой относительно новый тип электромеханического преобразователя энергии. Поэтому его продвижение на рынке происходит достаточно медленно. Однако уже сейчас многие электротехнические фирмы мира либо рассматривают возможность серийного выпуска ВИД либо уже производят его. Так, например;
– английская фирма Allenwest изготавливает общепромышленные электроприводы мощностью 7,5–22 кВт;
– фирма Jeffery Diamond выпускает электроприводы мощностью 35–200 кВт для горно–добывающей промышленности;
– американская фирма Magna Physics серийно производит электроприводы мощностью 10–1500 Вт;
– итальянская фирма Sicme Motor совместно с SRDL выпускает серию приводов RELU–SPEED мощностью 9–140 кВт с частотой вращения 3000 об/мин;
– Emerson Electric Co ежедневно выпускает 2000 стиральных машин, в которых используются эти двигатели;
– АМС совместно с NEC/Densai (Япония) выпускает вентильно-индукторные двигатели для электрического транспорта.
За последние десять лет тем доля применения ВИД в регулируемом электроприводе возросла в восемь раз и достигла 8%. По всей видимости, эта цифра будет расти.
Тема 1.4. Выбор номинальной скорости и степени защиты
Выбор номинальной скорости и передаточного отношения редуктора вновь проектируемого электропривода должен производиться на основе технико-экономического сравнения нескольких его вариантов. В случае напряженного режима работы с частыми пусками и остановами выбор номинальной скорости и оптимального передаточного отношения редуктора определяет продолжительность переходных процессов, что влияет на производительность рабочей машины.
Большое значение при комплектовании электрооборудования имеет правильный выбор двигателя по конструктивному исполнению для правильного монтажа и защиты от воздействия окружающей среды. Наиболее распространены производственные механизмы, где применяются двигатели с горизонтальным расположением вала и лапами для крепления к несущим конструкциям. Для некоторых механизмов, с целью уменьшения их габаритов, электротехническая промышленность выпускает двигатели с вертикальным расположением валов и фланцевым креплением.
Ответственной задачей является правильный выбор двигателя с учетом работы в определенных условиях окружающей среды. От способа защиты двигателя зависит его долговечность, надежность и безопасность обслуживания. По степени защиты от воздействия окружающей среды различают открытые, защищенные и закрытые двигатели.
Открытые двигатели не имеют защитных приспособлений, препятствующих соприкосновению с вращающимися и токоведущими частями, а также попаданию внутрь двигателя посторонних предметов. У защищенных двигателей имеются защитные приспособления в виде коробов, решеток и сеток.
Каплезащищенные двигатели имеют устройства, предохраняющие их от попадания внутрь капель, падающих отвесно или под углом не более 60 градусов к вертикали; брызгозащищенные двигатели защищены от попадания внутрь брызг любого направления. Защитные устройства различного назначения не нарушают свободного обмена воздуха между двигателем и окружающей средой. Пыль, влага и газы имеют свободный доступ внутрь защищенных, каплезащищенных и брызгозащищенных двигателей.
Более сложна конструкция защитных устройств закрытых двигателей. Они не имеют специальных отверстий для обмена воздухом между двигателем и окружающей средой. Различают взрывозащищенные, водозащищенные и герметичные двигатели. С большей герметизацией двигателей увеличиваются их масса и стоимость. На конструктивное исполнение двигателей влияют способы вентиляции. Двигатели выполняются с естественной вентиляцией, самовентиляцией и независимой вентиляцией. При естественной вентиляции двигатели не имеют каких-либо специальных устройств для охлаждения. У двигателей с самовентиляцией охлаждение осуществляется вентилятором, смонтированным на валу двигателя.
При закрытом исполнении вентилятор устанавливается снаружи под колпаком и обдувает ребристую поверхность двигателя. Интенсивность охлаждения двигателей с естественной вентиляцией и самовентиляцией зависит от угловой скорости вала двигателя и ухудшается при ее снижении. Охлаждение двигателей при независимой вентиляции осуществляется с помощью специального вентилятора, приводимого в движение дополнительным двигателем.
Для обоснованного выбора двигателя по мощности следует знать, как изменяется нагрузка на валу двигателя во времени, что в свою очередь позволяет судить о характере изменения потерь мощности. Кроме того, следует выяснить, как происходит, процесс нагрева двигателя в результате выделения в нем потерь энергии. Такой подход позволяет выбрать двигатель таким образом, чтобы максимальная температура изоляции обмоток, не превышала допустимой величины. Это условие является одним из основных для обеспечения надежной работы двигателя в течение всего срока эксплуатации.
Тема 1.5. Выбор номинальной мощности электродвигателей
Выбор мощности электродвигателя должен производиться в соответствии с характером нагрузок рабочей машины. Этот характер оценивают по двум признакам: а) по номинальному режиму работы; б) по изменениям величины потребляемой мощности.
При выборе номинальной частоты вращения двигателя следует исходить из того, что при всех прочих равных условиях двигатели повышенной быстроходности имеют меньшие габариты, массу, стоимость и отличаются более высокими энергетическими показателями, чем аналогичные им тихоходные. Однако слишком высокая быстроходность вынуждает вводить сложное передаточное устройство между валами двигателя и рабочей машины, в результате чего преимущества быстроходного двигателя могут свестись на нет.
Различают следующие режимы работы:
а) продолжительный (длительный), когда рабочий период настолько велик, что нагрев электродвигателя достигает своего установившегося значения (например у насосов, ленточных транспортеров, вентиляторов и т. п.);
б) кратковременный, когда длительность рабочего периода недостаточна для достижения электродвигателем температуры - нагрева, соответствующей данной нагрузке, а периоды остановки, наоборот, достаточны для охлаждения электродвигателя до температуры окружающей среды. В этом режиме могут работать электродвигатели самых разнообразных механизмов;
в) повторно-кратковременный — с относительной продолжительностью включения 15, 25, 40 и 60% при продолжительности одного цикла не более 10 минут (например, у подъемных кранов, некоторых станков, однопостовых сварочных двигателей-генераторов и т. п.).
По изменениям величины потребляемой мощности различаются следующие случаи:
а) постоянная нагрузка, когда величина потребляемой мощности в течение работы постоянна или имеет незначительные отклонения от среднего значения, как, например, у центробежных насосов, вентиляторов, компрессоров с постоянным расходом воздуха и т. п.;
б) переменная нагрузка, когда величина потребляемой мощности периодически меняется, как, например, у экскаваторов, кранов, некоторых станков и т. п.; в) пульсирующая нагрузка, когда величина потребляемой мощности меняется непрерывно, как, например, у поршневых насосов, щековых дробилок, грохотов и т. п.
Мощность электродвигателя должна удовлетворять трем условиям: а) нормального нагрева при работе; б) достаточной перегрузочной способности; в) достаточного пускового момента. Все электродвигатели подразделяются на две основные группы: для длительного режима работы (без ограничения продолжительности включения); для повторно-кратковременного режима с продолжительностями включения 15, 25, 40 и 60%
Для первой группы в каталогах и паспортах указывается длительная мощность, которую электродвигатель может развивать неограниченно долго, для второй группы — мощность, которую электродвигатель может развивать, работая с перерывами сколь угодно долгое время при определенной продолжительности включения. Правильно выбранным во всех случаях считается такой электродвигатель, который, работая с нагрузкой но графику, задан ному рабочей машиной, достигает полного допустимого нагрева всех своих частей. Выбор электродвигателей с так называемым «запасом по мощности», исходя из наибольшей возможной по графику нагрузки, ведет к недоиспользованию электродвигателя, а следовательно, к увеличению капитальных затрат и эксплуатационных расходов за счет снижения коэффициентов мощности и полезного действия. Чрезмерное увеличение мощности электродвигателя может привести также к рывкам во время разгона.
Если электродвигатель должен работать длительно с постоянной или мало меняющейся нагрузкой, то определение мощности его не представляет затруднений и производится по формулам, обычно включающим эмпирические коэффициенты. Значительно сложнее выбор мощности электродвигателей иных режимов работы. Кратковременная нагрузка характеризуется тем, что периоды включения коротки, а паузы достаточны для полного охлаждения электродвигателя. При этом принимается, что нагрузка электродвигателя в периоды включения сохраняется постоянной или почти постоянной. Для того чтобы в этом режиме электродвигатель был правильно использован по нагреву, необходимо выбрать его так, чтобы его длительная мощность (указываемая в каталогах) была меньше мощности, отвечающей кратковременной нагрузке, т. е. чтобы электродвигатель в периоды своей кратковременной работы имел тепловую перегрузку.
Если периоды работы электродвигателя значительно меньше времени, необходимого для его полного нагрева, но паузы между периодами включения существенно короче времени полного охлаждения, то имеет место повторно-кратковременная нагрузка. Практически следует различать два вида такой работы: а) нагрузка в период работы по величине постоянна и, следовательно, график ее изображается прямоугольниками, чередующимися с паузами; б) нагрузка в период работы изменяется по более или менее сложному закону. В обоих случаях задача выбора электродвигателя по мощности может быть решена как аналитически, так и графически. Оба эти способа являются достаточно сложными, поэтому практически рекомендуется упрощенный метод эквивалентных величии, включающий в себя три способа: а) среднего квадратичного тока; б) средней квадратичной мощности; в) среднего квадратичного момента.
Нагрев электродвигателя определяется режимом его работы, т. е. соотношением длительности периодов работы и пауз между ними, частотой включения двигателя. В зависимости от времени включения двигателя, соотношения продолжительности работы и пауз, а также от характера изменения нагрузки различают три режима работы электродвигателей: продолжительный, кратковременный, повторно-кратковременный.
Продолжительный режим работы (условное обозначение S1) – это режим работы такой длительности, когда при практически неизменной нагрузке и температуре окружающей среды двигатель нагревается до установившегося значения. В таком режиме работают электроприводы компрессоров, вентиляторов, дымососов, конвейеров непрерывного транспорта и т. д.
Кратковременный режим (условное обозначение S2) – это режим работы, при котором периоды нагрузки чередуются с периодами отключения (пауз) двигателя. Причем за время работы температура частей двигателя не успевает достигнуть установившегося значения, а за время пауз двигатель охлаждается до температуры окружающей среды.
Повторно-кратковременный режим (условное обозначение S3, S4, S5) – это такой режим работы, при котором периоды работы чередуются с паузами, причем ни в один из периодов работы температура двигателя не достигает установившегося значения, а во время снятия нагрузки двигатель не успевает охладиться до температуры окружающей среды. Двигатели, выпускаемые промышленностью для такого режима работы, характеризуются продолжительностью включения (ПВ), которая устанавливается по продолжительности одного цикла работы
 , (1.7)
, (1.7)
где tp – время работы двигателя; tп – время паузы.
ПВ стандартизованы и составляют 15, 25, 40, 60, 100 %. Значение ПВ указывается на паспорте двигателя. К механизмам с повторно-кратковременным режимом работы можно отнести металлообрабатывающие и деревообрабатывающие станки, краны, прокатные станы и т. д.
1.5.1. Расчет мощности и выбор двигателя для продолжительного режима работы
При постоянной или мало изменяющейся нагрузке на валу мощность двигателя должна быть равна мощности нагрузки. При этом должно удовлетворяться условие Рн ≥ Р, где Рн - номинальная мощность двигателя; Р - мощность нагрузки. Выбор двигателя сводится к выбору его по каталогу.
Для некоторых производственных механизмов, работающих в продолжительном режиме с постоянным моментом сопротивления на валу, имеются приближенные формулы для определения мощности двигателей.
Для вентилятора
 (1.8)
(1.8)
где Q - производительность вентилятора, м3/с; Н - напор, Н/м2; k - коэффициент запаса (1,1 – 2,0; чем больше моность, тем меньше k); ηв, ηп - КПД вентилятора и передаточного механизма.
Для насоса
 (1.9)
(1.9)
где Q - производительность насоса, м3/с; Н - напор, Н/м2; k - коэффициент запаса (1,1 - 1,2; чем больше мощность, тем меньше k); γ - удельный вес перекачиваемой жидкости; ηн, ηп – соответственно КПД насоса и передаточного механизма.
Для ленточного конвейера
 (1.10)
(1.10)
где ν- скорость движения, м/мин; f - коэффициент трения; l - рабочая длина, м; ηп - КПД передачи.
1.5.2. Расчет мощности и выбор двигателя для кратковременной нагрузки
Двигатели для кратковременного режима работы электропривода выбирают по номинальной мощности, которая должна быть равна мощности нагрузки с учетом длительности работы. Стандартные допустимые значения двигателей, выпускаемых промышленностью для кратковременной работы, составляют 10, 30, 60, 90 мин. При отсутствии двигателей кратковременного режима работы можно устанавливать двигатели повторно-кратковременного режима. При этом длительность работы 30 мин соответствует ПВ = 15%, 60 мин соответствует ПВ = 25%, а 90 мин соответствует ПВ = 40%. В крайнем случае возможно применение двигателей для продолжительного режима работы с Рн< Р и последующей их проверкой на тепловой режим.
1.5.3. Расчет мощности и выбор двигателя для повторно-кратковременного режима
Для электропривода, работающего в повторно-кратковременном режиме, мощность двигателя рассчитывают методом средних потерь или эквивалентных величин. Первый метод более точный, но более трудоемкий. Удобнее пользоваться методом эквивалентных величин. В зависимости от заданного графика нагрузки Р = f(t), М = f(t), I = f (t) определяют среднеквадратичные величины, которые называют эквивалентными.
Эквивалентная мощность представляет собой среднеквадратичную мощность нагрузочной диаграммы
 (1.11)
(1.11)
где t1, t2,…, tк - промежутки времени, в которые мощность нагрузки соответственно равна Р1, Р2,…, Рк.
По каталогу для полученных значений РЭКВ и ПВ выбирают номинальную мощность двигателя из условия Рн ≥ РЭКВ.
Если задана диаграмма М = f(t), то эквивалентный момент
 (1.12)
(1.12)
а эквивалентную мощность, при частоту вращения n, определяют по выражению
РЭКВ = МЭКВ ·n / 9550 (кВт). (1.13)
Если задана диаграмма I = f (t) , эквивалентный по нагреву ток
 (1.14)
(1.14)
а мощность двигателя определяют по выражениям
РЭКВ = Uн·IЭКВ/η - для двигателя постоянного тока;
РЭКВ = 3Uн·IЭКВ·cosφ/η –
для фазных Uн и IЭКВ двигателя переменного тока.
Расчетное значение ПВр часто отличается от стандартных значений, поэтому либо округляют полученное значение ПВр до ближайшего стандартного, либо пересчитывают эквивалентную мощность по формуле
 (1.15)
(1.15)
При работе наблюдаются кратковременные перегрузки, превышающие номинальную мощность двигателя. Они не оказывают существенного влияния на нагрев двигателей, но могут привести к неустойчивой работе или остановке. Поэтому двигатель необходимо проверять на перегрузочную способность по выражению
Рm/Рн = ku Mm/Mн, (1.16)
где Рm- наибольшая мощность в нагрузочной диаграмме; Mm/Mн - кратность максимального момента определяют по каталогу; коэффициент ku = 0,8 учитывает возможное снижение напряжения в сети. Если это условие не выполняется, то следует выбрать по каталогу двигатель большей мощности и вновь проверить его на перегрузочную способность.
Тема 1.5.4. Проверка механической перегрузочной способности электродвигателя
После выбора мощности электродвигателя по условиям нагрева необходимо произвести проверку механической перегрузочной способности электродвигателя, т. е. убедиться, что максимальный момент нагрузки по графику при работе и момент при пуске не будут превышать значения максимального момента по каталогу. У асинхронных и синхронных электродвигателей величина допустимой механической перегрузки обуславливается их опрокидывающим электромагнитным моментом, по достижении которого эти электродвигатели останавливаются.
Кратность максимальных моментов по отношению к номинальным должна составлять не менее 1,8 у трехфазных асинхронных электродвигателей с контактными кольцами, не менее 1,65 у трехфазных асинхронных двигателей с короткозамкнутым ротором. Кратность максимального момента синхронного электродвигателя должна быть также не ниже 1,65 при номинальных напряжениях, частоте и токе возбуждения, с коэффициентом мощности 0,9 (при опережающем коэффициенте мощности). Практически асинхронные и синхронные электродвигатели имеют механическую перегрузочную способность до 2—2,5, а у некоторых специальных электродвигателей эта величина достигает 3—3,5.
Допустимая перегрузка электродвигателей постоянного тока определяется условиями работы и по ГОСТ составляет по моменту от 2 до 4, причем нижний предел относится к электродвигателям с параллельным, а верхний — к электродвигателям с последовательным возбуждением.
Если питающая и распределительная сети чувствительны к нагрузке, то проверка механической перегрузочной способности должна производиться с учетом потерь напряжения в сетях. Для асинхронных короткозамкнутых и синхронных электродвигателей кратность начального момента должна быть не менее 0,9 (по отношению к номинальному). В действительности кратность начального момента у электродвигателей с двойной беличьей клеткой и с глубоким пазом значительно выше и достигает 2—2,4.
При выборе мощности электродвигателя следует иметь в виду, что на нагрев электродвигателей оказывает влияние частота включений. Допустимая частота включений зависит от нормального скольжения, махового момента ротора и кратности пускового тока.
Асинхронные электродвигатели нормальных типов допускают без нагрузки от 400 до 1000, а электродвигатели с повышенным скольжением — от 1100 до 2700 включений в час. При пуске под нагрузкой допустимое число включений значительно сокращается.
Пусковой ток электродвигателей с короткозамкнутым ротором имеет большую величину, что нужно учитывать в условиях частых пусков и, особенно, при повышенном времени разгона. В двигателях с фазным ротором часть тепла, образующегося при пуске, выделяется в реостатах, в короткозамкнутых электродвигателях все тепло выделяется в самой машине, что обуславливает ее повышенный нагрев.
Контрольные вопросы
1. Пояснить устройство и работу двигателей переменного тока.
2. Описать режимы работы асинхронных двигателей.
3. Обосновать перспективность регулируемых электродвигателей.
4. Как осуществляется выбор номинальной скорости электродвигателей и степени защиты?
5. Как осуществляется выбор номинальной мощности электродвигателей?
РАЗДЕЛ 2
Выбор средств электропитания
Тема 2.1 Выбор сечений кабелей по условиям нагревания
Допустимые токовые нагрузки на провода и кабели определяются из соотношения
Iд = Кп Iн. д . (2.1)
Здесь Iн. д - допустимая длительная токовая нагрузка на провод, кабель при нормальных условиях прокладки;
Кп - коэффициент, учитывающий изменения условий прокладки проводов, кабелей и равный произведению отдельных поправочных коэффициентов:
Кп = Iн. д П Кп i . (2.2)
Поправочные коэффициенты учитывают [7]:
К1 - фактическую температуру окружающей среды. Нормальные условия - 25°С при прокладке в воздухе и 15°С при прокладке в земле;
К2 - число проложенных в траншее рабочих кабелей;
К3 - условия кратковременного или повторно-кратковременного режима работы электроприемников
К4 - сечение кабеля и его местоположение при прокладке в блоке
К5 - напряжение кабеля при прокладке в блоке
К6 - общую среднесуточную нагрузку кабелей при прокладке в блоке
К7 - прокладку кабелей в двух параллельных блоках одинаковой конфигурации
К8 - прокладку проводов в коробах и лотках
К9 - увеличение допустимой нагрузки на кабели до 10кВ при аварийном режиме
К10 - расположение шин на изоляторах.
Если кабель прокладывается в земле, температуру земли выбранного участка учитывают отношением нормальной температуры к фактической (К2). Зачастую применяют кабель марки АВБбШв.
Согласно ПУЭ влияние совместно проложенных кабелей учитывается в том случае, если длина участка превышает 10 метров. Если кабели прокладываются в одной траншее на расстоянии 100мм, для них коэффициент К2 = 0,9. Если кабели прокладываются совместно на расстоянии менее 100мм, то принимают К2 = 0,78 и так далее [7].
Тема 2.2 Выбор сечений кабелей по условию допустимого падения напряжения
При выборе сечений кабеля по условию допустимого падения напряжения можно руководствоваться методикой, изложенной в [7].
Активное сопротивление проводов и кабелей определяется по формулам
r = 1000 ρ / F (Ом/км) , (2.3)
r = 1000 /( γ .F) (Ом/км) , (2.4)
где ρ – расчетное удельное сопротивление жилы кабеля, выраженное в Ом. м / мм2 ;
γ – расчетная удельная проводимость провода или жилы кабеля в м / Ом. мм2 ;
F – номинальное сечение жилы кабеля мм2 .
Индуктивное сопротивление трехфазной линии с проводами из цветных металлов при частоте переменного тока 50гц определяется по формуле
x = 0,1445 lg (2D/d) + 0,016 (Ом/км) , (2.5)
где d – внешний диаметр провода, мм
D – среднее геометрическое расстояние между проводами линии, вычисляемое по формуле
![]() , (мм) (2.6)
, (мм) (2.6)
Потеря напряжения при заданном сечении проводов линии с учетом индуктивного сопротивления линии при различных коэффициентах мощности нагрузок линии определяется по формуле
ΔU = α2 (r Ma + x Mr,), (2.7)
где Δ - потеря напряжения в линии (в %);
r и x – активное и индуктивное сопротивления линии, Ом/км;
Ma – сумма моментов активных нагрузок;
Mr – сумма моментов реактивных нагрузок;
α2 – коэффициент, зависящий от системы тока и от принятых единиц измерения для входящих в формулу величин.
Выбор сечения проводов линии по заданной величине потери напряжения с учетом индуктивности линии производится следующим образом. Определяется значение расчетной величины потери напряжения по формуле
ΔUа = ΔU - α2 xср Mr,, (2.8)
где ΔU – максимальная потеря напряжения в линии (в %);
Mr – максимальное значение суммы моментов реактивных нагрузок для рассчитываемой линии;
xср – среднее индуктивное сопротивление линии Ом/км.
В дальнейшем расчет продолжается без учета индуктивного сопротивления линии
При заданном сечении проводов линии потеря напряжения определяется по формуле
ΔUа = α1 xср Mа /F,, (2.9)
Сечение при заданной потери напряжения вычисляется по формуле
F= α1 Mа /ΔU, (2.10)
где F – сечение провода в мм2;
ΔUа – потеря напряжения в линии (в %);
Ma – сумма моментов нагрузки, т. е. сумма произведений активных нагрузок, передаваемых по участкам линии, умноженных на длины этих участков;
α1- коэффициент, зависящий от системы тока и от принятых при вычислениях единиц измерения для входящих в формулу величин (значения коэффициентов α приведены в [7]).
Тема 2.3 Проверка по условиям пуска электродвигателей
Сечение и длина кабелей должны обеспечивать нормальный пуск электродвигателей. Пусковые токи создают увеличенную по сравнению с нормальным режимом потерю напряжения в питающем кабеле, в результате чего напряжение на зажимах двигателя снижается. Возможность разворота двигателя определяется значением остаточного напряжения на его зажимах. При расчете возможности запуска асинхронного двигателя необходимо учитывать механическую характеристику машины. При наличии движущихся частей с большими инерционными массами необходимо учитывать передачу, а также число оборотов вала машины, которое может быть значительно меньше оборотов двигателя.
Для нормального запуска необходимо, чтобы пусковой момент двигателя Мп был больше момента сопротивления трогания Мт механизма, приводимого во вращение, а для разгона необходим еще избыточный момент Мизб. Кроме того, согласно ГОСТ 183-66 следует учитывать допуск на уменьшение пускового момента на 20%. С учетом сказанного, а также того, что можно принять Mизб = 0,25 Mн:
0,8 Mп ≥ ( Mт + Mизб) = Mт + 0,25 Mн, (2.11)
Разделив правую и левую часть на номинальный момент, получим в относительных единицах: mп ≥ ( mт + mизб) K1,
где K1 = 1,25 – коэффициент, учитывающий снижение напряжения.
При пуске снижается напряжение обмотке статора двигателя. Момент на валу снижается пропорционально квадрату этого напряжения. Для пускового момента в относительных единицах
mп = U* 2 mп. н,, (2.12)
где U* = U / Uн – относительное значение напряжения на клеммах двигателя. Здесь н – обозначение номинальной величины.
Потеря напряжения в элементах сети в относительных единицах при пуске двигателя составит
ΔU = √3 Iп (r∑ cosφ + x∑ sinφ,) /Uн, (2.13)
где Iп – пусковой ток;
r∑ и x∑ – активное и индуктивное сопротивление линии.
Тема 2.4. Выбор сечений кабелей по условию экономической плотности тока
Сечения проводников должны быть проверены по экономической плотности тока. Экономически целесообразное сечение F, мм2, определяется из соотношения
![]() F = I / Jэк, (2.14)
F = I / Jэк, (2.14)
где I - расчетный ток в час максимума энергосистемы, А;
Jэк - нормированное значение экономической плотности тока, А/мм2, для заданных условий работы, выбираемое по табл. 2.1
Сечение, полученное в результате указанного расчета, округляется до ближайшего стандартного сечения. Расчетный ток принимается для нормального режима работы, т. е. увеличение тока в послеаварийных и ремонтных режимах сети не учитывается.
Увеличение количества линий или цепей сверх необходимого по условиям надежности электроснабжения в целях удовлетворения экономической плотности тока производится на основе технико-экономического расчета. При этом во избежание увеличения количества линий или цепей допускается двукратное превышение нормированных значении, приведенных в табл. 2.1

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
