


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Экономическая плотность тока
Таблица 2.1
Проводники | Экономическая плотность тока, А/мм2, при числе часов использования максимума нагрузки в год | ||
более 1000 до 3000 | более 3000 до 5000 | более 5000 | |
Неизолированные провода и шины: | |||
медные | 2,5 | 2,1 | 1,8 |
1,3 | 1,1 | 1,0 | |
Кабели с бумажной и провода с резиновой и поливинил-хлоридной изоляцией с жилами: | |||
медными | 3,0 | 2,5 | 2,0 |
алюминиевыми | 1,6 | 1,4 | 1,2 |
Кабели с резиновой и пластмассовой изоляцией с жилами: | |||
медными | 3,5 | 3,1 | 2,7 |
алюминиевыми | 1,9 | 1,7 | 1,6 |
Проверке по экономической плотности тока не подлежат:
1. сети промышленных предприятий и сооружений напряжением до 1 кВ при числе часов использования максимума нагрузки предприятий до 40час;
2. ответвления к отдельным электроприемникам напряжением до 1 кВ, а также осветительные сети промышленных предприятий, жилых и общественных зданий;
3. сборные шины электроустановок и ошиновка в пределах открытых и закрытых распределительных устройств всех напряжений;
4. проводники, идущие к резисторам, пусковым реостатам и т. п.;
5. сети временных сооружений, а также устройства со сроком службы 3-5 лет.
При пользовании табл. 2.1 необходимо руководствоваться следующим:
1. При максимуме нагрузки в ночное время экономическая плотность тока увеличивается на 40 %.
2. Для изолированных проводников сечением 16 мм2 и менее экономическая плотность тока увеличивается на 40%.
Контрольные вопросы
1. Как проводится выбор сечений кабелей по условиям нагрева?
2. Как проводится выбор сечений кабелей по допустимому падению напряжения?
3. Как проводится проверка по условиям пуска электродвигателей?
4. Как проводится выбор сечений кабелей по экономической плотности тока?
РАЗДЕЛ 3
электродвигатели для автономных объектов
(Раздел предназначен для самостоятельной творческой работы студентов СНО и аспирантов)
При разработке, проектировании и расчетах электродвигателей автономных энергоустановок [10] (изучить самостоятельно с целью определения наиболее перспективных решений) решаются задачи снижения массообъемных показателей электрооборудования и повышения его энергоэффективности [11] (ознакомиться самостоятельно). Часто эти задачи являются противоречивыми. Действительно, при попытке снизить объем меди электрических машин и аппаратуры управления и защиты уменьшением сечения проводников, в рамках традиционных технических решений, растут сопротивления этих проводников и растут потери в меди.
Далее рассмотрена возможность повышения энергоэффективности машин переменного тока, с учетом необходимости управления (в простейшем случае – пуск, торможение, останов) и защиты (от перегрузок коротких замыканий и т. п.). Снижение потерь достигается не только за счет значительного уменьшения вылета лобовых частей обмоток машин [12,13] (изучить самостоятельно и выявить достоинства и недостатки технических и научных решений), но и за счет значительного уменьшения длины проводов, соединяющих расположенную в корпусе машины аппаратуру управления и защиты с выводами обмотки статора.
В работах [14,15] рассматриваются ЕС-двигатели (BLDC-двигатели) - синхронные двигатели со встроенным электронным управлением. Их применение уменьшает потребление электроэнергии и увеличивает производительность оборудования. Однако, их электронные блоки располагаются в отдельном корпусе, соединенным с корпусом машины. В разделе рассмотрены машины с блоками находящимися внутри корпуса машины – вблизи обмотки статора, что приводит к существенной экономии материалов.
Тема 3.1. Расположение блоков управления и защиты
В работе [16] (изучить самостоятельно) рассмотрена обмотка статора управляемой многополюсной асинхронной машины для стартер-генераторной системы гибридного автомобиля. Рассмотрим конструкцию энергоэффективной машины переменного тока с блоками управления и защиты [18], обмотка которой выполнена подобно обмотке, приведенной в [16] (изучить самостоятельно).
На рис.3.1 в качестве примера показана эскизная компоновка асинхронной машины с управлением и защитой, ротор которой имеет короткозамкнутую обмотку, а обмотка статора - коммутируется электронными блоками. Изображены: корпус асинхронной машины 1, статор машины 2, сердечник статора 3, в пазы 4 которого уложена обмотка 5, ротор 6 с короткозамкнутой обмоткой, который закреплен на валу 7, вращающегося в подшипниках 8. Показаны также проводники выводов фаз обмотки статора 9, с которыми соединены выводы блоков 10 управления и защиты
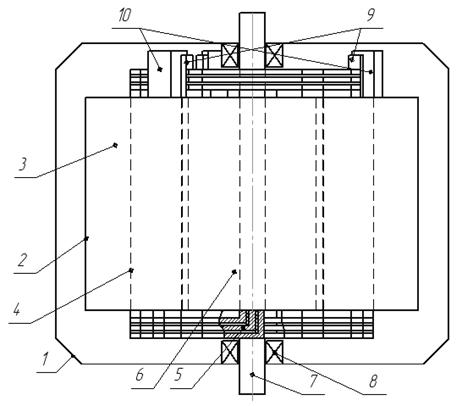
Рис. 3.1. Эскизная компоновка управляемой асинхронной машины
На рис. 3.2 показана схема трехфазной обмотки 9, с электронными блоками управления и защиты, соответствующая эскизной компоновке, представленной на рис.3.1. Обозначения на схеме соответствуют [17] (Обозначения в схемах электрических машин изучить самостоятельно).
Как видно, сердечник статора имеет двенадцать пазов, которые пронумерованы в центре рисунка в направлении чередования фаз. Сплошными линиями в пазах обозначены активные проводники 12 верхнего слоя обмотки, а пунктиром – активные проводники 11 нижнего слоя.
На рис. 3.2 показаны также витковые лобовые перемычки 13, соединяющие активные проводники витков, лобовые перемычки 14, соединяющие витковые группы, а также показаны лобовые перемычки 15, соединяющие ветви фаз.
Выводы фаз обмотки статора имеют следующее обозначения: начало и конец первой фазы обозначены U1 ,U2, начало и конец второй – V1, V2, третьей – W1, W2. Эта схема соответствует четырехполюсной трехфазной волновой обмотке с диаметральным шагом.
Блоки 10 управления и защиты соединяют концы и начала фаз, образуя схему соединения «треугольник». Они включают симметричные тиристоры 17 с управляющими электродами 18 и имеют силовые выводы 19,20, с которыми соединены катоды тиристоров 17. Силовые выводы 19,20 соединены с выводами 16 фаз обмотки 5. Управляющие электроды 18 связаны с синхронизирующими входами 21, а также с входами защиты 22 блоков 10.
К входам защиты 22 присоединены выходы датчиков токов 23, расположенных между силовыми выводами 20 электронных блоков и выводами концов фаз (например, U2).
Синхронизирующие входы 21 блоков 10 соединены с выходами датчиков напряжения 24, которые представляют собой последние ветви фаз обмотки 5.
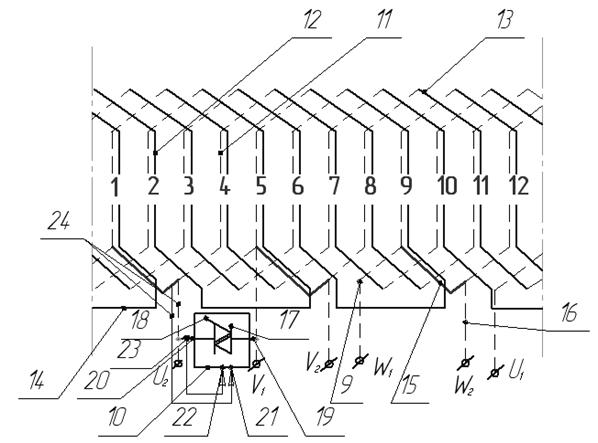
Рис. 3.2. Схема обмотки статора с одним из электронных блоков
Таким образом, длина шин, соединяющих вентили 17 с выводами фаз обмотки, а также датчики 23, 24 с входами 21, 22 блоков управления и защиты, минимальна. Это уменьшает массу медных проводников и снижает электрические потери в асинхронной машине, позволяет увеличить помехозащищенность системы управления. Для нормальной работы системы управления и защиты необходимо включить между выводами обмотки статора, по крайней мере, еще один электронный блок, аналогичный блоку, представленному на рис.3.2 [19] (работ электронных устройств изучить самостоятельно).
На рис.3.3. показан вид сверху активной части статора энергоэффективной электрической машины переменного тока, схема обмотки которой приведена на рис. 3.2. Пазы сердечника пронумерованы соответственно схеме обмотки. Лобовые части отдельных фаз выделены оттенками серого цвета.
Показаны активные проводники 11, 12 обмотки, лобовые перемычки 13, соединяющие активные проводники витков, лобовые перемычки 14, соединяющие витковые группы, а также перемычки 15, соединяющие ветви фаз.
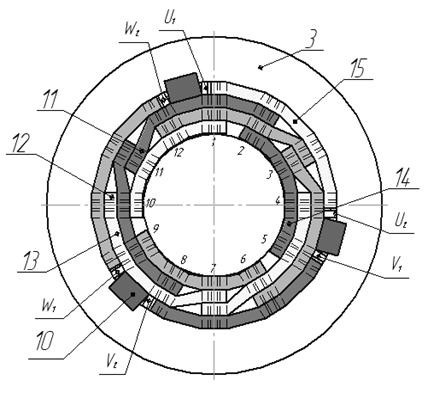
Рис. 3.3. Вид со стороны выводов обмотки статора
Площади сечения лобовых перемычек в местах их соединения с активными проводниками 11, 12 обмотки в два раза меньше площадей поперечных сечений соединяемых проводников. Такое выполнение обмотки позволяет разместить электронные блоки управления и защиты 10 между выводами обмотки статора, над торцевой поверхностью сердечника. На рис. 3.3 показано расположение трех блоков управления и защиты. Третий электронный блок позволяет обеспечить резервирование и повысить надежность работы системы управления и защиты энергоэффективной электрической машины переменного тока.
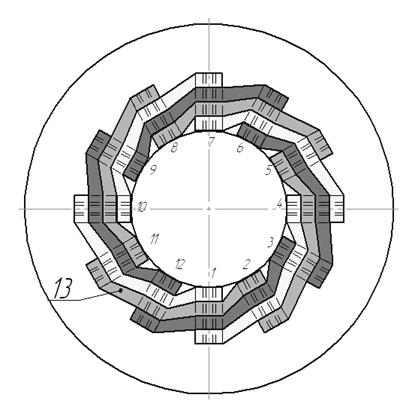
Рис. 3.4. Вид активной части статора снизу
На рис.3.4. показан вид активной части статора этой электрической машины с со стороны торца, где нет выводов фаз (снизу). Нумерация пазов по внутренней окружности чертежа, соответствующей зубцовой поверхности сердечника, соответствует рис. 2, 3. Показаны витковые лобовые перемычки 13. Перемычки разных фаз выделены оттенками серого цвета. Лобовые перемычки фазы U – самый светлый оттенок, лобовые перемычки фазы W – более темный оттенок и лобовые перемычки фазы V – самый темный оттенок. Они расположены над торцевой поверхностью зубцовой зоны сердечника. Места соединений этих витковых лобовых перемычек с проводниками верхнего слоя обмотки расположены со стороны зубцовой поверхности сердечника, а места соединений этих лобовых перемычек с проводниками нижнего слоя обмотки расположены со стороны спинки сердечника. Площади сечения лобовых перемычек в местах их соединения с активными проводниками, также как на рис.3.3, в два раза меньше площадей поперечных сечений соединяемых проводников.
Тема 3.2. Работа системы управления и защиты
Система управления и защиты энергоэффективной электрической машины переменного тока может выполнять функции управления пуском (осуществлять безударный пуск электрической машины), торможения (электродинамическое торможение) и реверсирования без регулирования частоты вращения вала в рабочих режимах. Также может осуществляться фазовое регулирование частоты вращения вала, при вентиляторном характере нагрузке, и импульсное, - при значительной механической инерции приводимого во вращение объекта регулирования.
Для безударного пуска после включения в работу блоков 10 к источнику переменного тока вентилями 17 подключаются две фазы обмотки двигателя при прохождении линейного напряжения между этими фазами через ноль, а затем через 90 градусов подключается третья фаза. Безударный пуск асинхронной машины также может осуществляться изменением угла управления вентилями 17 после включения системы управления от 180 градусов до рабочего значения.
Задание закона изменения угла управления может в простейшем случае производиться с помощью RC цепи. Для упрощения формирователей управляющих импульсов, цепи управления вентилей 17 получают электропитание от анодного напряжения.
Датчики тока необходимы для защиты двигателя от перегрузки. При превышении током одного из датчиков токовой уставки, - запрещается подача управляющих импульсов на вентили 17. Фаза обмотки машины включает значительное число последовательно соединенных ветвей, поэтому величина напряжения, подаваемого с датчика напряжения на блоки управления и защиты, составляет не более 50В.
Применяется также защита от исчезновения волны или полуволны тока фазы обмотки статора (режим типа обрыва фазы). Исчезновение тока в фазе приводит к значительному уменьшению вращающего момента, что вызывает аварийную ситуацию при работе механизмов подъема груза. Поэтому защита от исчезновения фазы должна сработать не более чем через 20 мс, исключив аварийный режим. Защита от исчезновения тока фазы выполняется с учетом того, что при фазовом регулировании ток может иметь прерывистую форму, т. е. имеются задержки на время пропадания сигналов в каждом канале. Более подробно работа системы управления и защиты описана в [19] (изучить особенности работы системы самостоятельно).
Тема 3.3. Оценка энергоэффективности
Повышение энергоэффективности электродвигателя со встроенной системой управления и защиты определяется в основном увеличением развиваемого им максимального момента, а также снижением электрических потерь в цепи статора.
Увеличением максимального момента рассмотренного двигателя, по сравнению с двигателем, описанным в [16], связано с расположением лобовых перемычек, соединяющие витковые группы обмотки статора над зубцовой зоной статора с меньшей магнитной проницаемостью.
Для лобовых перемычек в виде прямоугольных шин индуктивность рассеяния перемычек фазы обмотки имеет следующий вид:

где Lл1 – индуктивность рассеяния витковых перемычек фазы обмотки статора (Гн);
lЛВ – длина лобовых частей одного витка обмотки статора (мм);
h, b, δ, Δ – размеры перемычек и размеры зазоров (мм);
μ – усредненная магнитная проницаемость зубцовой зоны
сердечника, над которой расположены витковые перемычки;
w – число витков ветви фазы обмотки;
q – число ветвей в фазе.
Аналогичные выражения связывают индуктивности рассеяния перемычек между витковыми группами и перемычек между ветвями. Как следует из (1) с увеличением усредненной магнитной проницаемости относительно стали, уменьшается индуктивность рассеяния фазы статора – момент возрастает [17].
Активное сопротивление цепи с фазой обмотки статора и вентильным элементом включает сопротивления проводников в пазах сердечника r1П, сопротивления витковых перемычек фазы обмотки r1Л, сопротивления переходов от проводников в пазах к лобовым перемычкам r1П-Л, сопротивление перемычек между витковыми группами r1ПВГ, сопротивление перемычек между ветвями r1ПВ и эквивалентное сопротивление вентильных элементов r1В:
![]() . (3.2)
. (3.2)
Расчеты показали, что для низковольтных машин переменного тока мощностью 15 кВт экономия меди в цепи статора составляет около30%.
Если принять, что потери в меди обмотки статора таких машин составляют 43% суммарных потерь - повышение коэффициента полезного действия составит около 1%, что приведет к существенному снижению энергопотребления.
Такие двигатели могут найти применение в мобильных энергоустановках на базе микротурбин С30 и С65 [20] (найти и изучить самостоятельно дополнительные материалы по микротурбинным энергоустановкам).
Итогом изучения этого раздела является критический анализ и аспирантами и студентами СНО научных и технических решений в рассмотренной области.
Контрольные вопросы
1. Как расположены блоки управления и защиты в энергоэффективной электрической машине?
2. Описать работу системы управления и защиты энергоэффективной электрической машины.
3. Как проводится оценка энергетической эффективности электрической машины со встроенной системой управления и защиты?
5. Сделать предложения по повышению энергетической эффективности работы электрической машины в режиме двигателя.
РАЗДЕЛ 4
Выбор аппаратуры защиты
Тема 4.1. Требования к выбору аппаратуры защит
В электроустановках, присоединенных к сети 0,4 кВ, для любого вида присоединения должны быть обеспечены:
1. Нормальный режим работы. Номинальные напряжения и токи аппаратов и допустимые токи кабелей должны соответствовать номинальному напряжению и длительному расчетному току нагрузки. Исполнение аппаратов и типы кабелей должны соответствовать условиям их эксплуатации.
2. Стойкость при КЗ. Аппараты и кабели должны быть стойкими при КЗ, а аппараты защиты – надежно отключать расчетные токи КЗ
3. Защита от всех типов КЗ. Параметры аппаратов защит и кабелей должны обеспечивать достаточную чувствительность защиты ко всем видам КЗ в конце защищаемой зоны. Рекомендуется применять автоматические выключатели с комбинированным расцепителем, элемент с зависимой характеристикой которого является резервной защитой. Должны обеспечиваться селективность (отключение только поврежденного участка), надежность (срабатывание при появлении условий на срабатывание и несрабатывание при их отсутствии), быстродействие защиты. Быстрое отключение КЗ обеспечивает стойкость аппаратов и кабелей к термическому действию токов КЗ, снижает длительность перерывов питания электроприемников, облегчает последующий самозапуск электродвигателей, обеспечивает безопасность обслуживающего персонала, предотвращает возможность нарушения синхронной параллельной работы маломощных аварийных генераторов, а также синхронных электродвигателей.
4. Защита от ненормальных режимов – длительной перегрузки электродвигателей, подверженных перегрузкам по технологическим причинам, а также проводов и кабелей в случаях предусмотренных ПУЭ [1]. При пуске и самозапуске электродвигателей аппараты защиты не должны отключать цепь, а сечение кабелей должно обеспечивать достаточный для разворота электродвигателей уровень напряжения на их зажимах.
Для защиты людей и животных при косвенном прикосновении должно быть выполнено автоматическое отключение питания с применением системы TN-C-S. Разделение PEN-проводника на нулевой защитный (РЕ) и нулевой рабочий (N) проводники следует выполнять на вводном щитке. При питании таких электроустановок от встроенных и пристроенных подстанций должна быть применена система TN-S, при этом нулевой рабочий проводник должен иметь изоляцию, равноценную изоляции фазных проводников на всем его протяжении.
Тема 4.2 Защита от длительной перегрузки
Номинальный ток теплового расцепителя Iт. р. определяется по формулам:
для осветительной нагрузки
Iт. р. = 1,1 Iн, (4.1)
для асинхронного двигателя
Iт. р. ≥ Iп / α , (4.2)
где α = 2,5 для асинхронных двигателей с к. з. ротором при легком пуске (5-10с);
α = 1,6-2 – при тяжелом пуске (до 40с) или частоте пусков более 15-ти в час.
Ток срабатывания электромагнитного расцепителя Iэм должен быть больше пускового тока двигателя или самозапуска нескольких двигателей Iп, подключенных к автомату:
Iэм = Кн. Iп, (4.3)
где Кн – коэффициент надежности.
Коэффициент надежности Кн=1,4.
Контрольные вопросы
1. Назвать требования к выбору аппаратуры защит.
2. Описать работу защиты от длительной перегрузки.
РАЗДЕЛ 5
пример расчета для выбора асинхронного двигателя, средств электропитания и защиты
5.1. Исходные данные
Выбор варианта
Номер варианта задания от 1 до 28 из табл. 1 определяется преподавателем по списку группы персонально для каждого студента.
Преподавателем задается таблица, где приведены исходные данные для студентов одной группы. Если в потоке более одной группы, то значения параметров определяются умножением величин мощностей нагрузок Р1, Р2, Р3, Р4, Р5 (и только мощностей!) на сумму цифр номера группы. Значения интервалов времени t1, t2, t3, t4, t5 и длины кабеля L одинаковы для всех групп студентов.
Содержание задания
1) Выбор электродвигателя: построить график нагрузочной характеристики Р(t), произвести расчет эквивалентной мощности и, пользуясь справочными данными, выбрать мощность и тип асинхронного электродвигателя общего назначения; проверить выбранный электродвигатель на перегрузочную способность.
2) Выбор кабеля для электропитания двигателя: рассчитать и выбрать по справочным данным сечение и марку кабеля с алюминиевыми проводами для электропитания двигателя; проверить выбранное сечение на допустимую величину потери напряжения.
3) Выбор аппаратуры управления и защиты электродвигателя от перегрузки: определить токовую уставку для защиты от перегрузки выбранного электродвигателя и выбрать тип магнитного пускателя (или контактора).
4) Выбор защиты от короткого замыкания: определить токовую уставку и тип воздушного автомата для защиты от коротких замыканий цепей с выбранным двигателем.
5) Построение принципиальной электрической схемы: изобразить принципиальную электрическую схему электропитания, защиты и управления асинхронным электродвигателем в соответствии с выбранной коммутационной аппаратурой.
Правила оформления
Расчетную работу оформить в виде записки на листах формата А4 210х297 мм по правилам оформления технической документации. В частности, текст должен объяснять применение тех или иных формул и расчетов, в рисунках должны использоваться чертежные инструменты и шрифт. Титульный лист оформлять по стандартному образцу. Приветствуется машинная графика и распечатка текста на принтерах ЭВМ.
Внимание! Работы, оформленные с нарушением указанных правил, к рассмотрению не принимаются.
Срок выполнения работы
Работа сдается на проверку преподавателю не позднее чем через 2 недели после выдачи задания.
Консультации
Предполагают устранение преподавателем затруднений, которые возникли у студента при выполнении расчетной работы, после того как он сам изучил методику и попытался выполнить расчеты. Консультации проводятся после лабораторных работ и лекций, а также на индивидуальных занятиях.
Защита работы
Означает, что студент должен быть готов ответить на все вопросы преподавателя, касающиеся сделанной работы и убедить преподавателя в правильности принятых студентом технических решений.
5.2. Методика расчета для продолжительного режима
Методику выполнения расчетной работы рассмотрим на конкретных примерах.
Исходные данные приведены в табл. 5.1.
Таблица 5.1
Ва- ри- | Активная мощность нагрузки | Интервалы времени в цикле | Длина кабеля, L, м, и | ||||||||
ант | P1, | P2, | P3, | P4, | P5, | t1, | t2, | t3, | t4, | t5, | условия |
кВт | кВт | кВт | кВт | кВт | с | с | с | с | с | прокладки | |
29 | 105 | 120 | 135 | 90 | 75 | 15 | 20 | 20 | 23 | 22 | 205; зем. |
Это значит, что асинхронный электродвигатель подключен к трехфазной электрической сети напряжением 380 В (рис.5.1) с помощью трехфазного кабеля длиной 250 м, проложенного в земле, и за интервалы времени работы, равные 15, 20, 20, 23, 22 секундам, его нагрузка принимает значения 105, 120, 135, 90, 75 кВт соответственно.
Рис. 5.1. Схема подключения электродвигателя
1) Выбор электродвигателя: построить график нагрузочной характеристики Р(t), произвести расчет эквивалентной мощности и, пользуясь справочными данными, выбрать мощность и тип асинхронного электродвигателя общего назначения; проверить выбранный электродвигатель на перегрузочную способность.
Строим график нагрузочной характеристики Р(t) (рис. 5.2).
Рис. 5.2. График нагрузочной характеристики
Определяем режим работы электродвигателя. Так как за цикл работы двигателя мощность нагрузки не снижается до 0, то режим работы продолжительный: иначе говоря, двигатель работает непрерывно, и продолжительность включения учитывать не требуется.
Внимание! Если в некоторые интервалы времени мощность нагрузки Р равна нулю (Р = 0), то задание следует выполнять другим методом, изложенным в п.5.3 для четного варианта.
Находим длительность цикла
Тц = t1 + t2 + t3 + t4 + t5 = 15 + 20 + 20 + 23 + 22 = 100 c.
Это значит, что каждые 100 секунд изменения мощности нагрузки Р1, Р2, Р3, Р4, Р5 повторяются.
Находим эквивалентную мощность (расчеты рекомендуется округлять до трех значащих цифр):
 .
.
 кВт.
кВт.
Это значит, что за цикл работы Tц потери энергии и температура нагрева изоляции электрического двигателя, работающего с неизменной мощностью Р = 106 кВт, будут такими же, как и при переменной мощности нагрузки Р1, Р2, Р3, Р4, Р5 (рис. 5.2).
Иными словами, переменная мощность нагрузки Р(t) заменяется эквивалентной постоянной мощностью Рэкв.
Используя справочные данные (табл. П.1 или [4; 5] списка литературы), выбираем асинхронный электродвигатель основного исполнения с синхронной скоростью вращения ротора n = 1500 об/мин из условия, что номинальная мощность Рн ³ Рэкв.
Рн = 110 кВт > Рэкв = 106 кВт.
Выбираем типоразмер двигаА280S (табл. П.1).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
