


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Выбор электродвигателей,
средств электропитания и защиты
Учебно-методическое пособие
Самара
Самарский государственный технический университет
2012
| МИНОБРНАУКИ РОССИИ Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Самарский государственный технический университет» |

Кафедра теоретической и общей электротехники
Выбор электродвигателей,
средств электропитания и защиты
Утверждено редакционно-издательским советом университета в качестве учебно-методического пособия
Самара
Самарский государственный технический университет
2012
УДК 621.313
Выбор электродвигателей, средств электропитания и защиты: учебно-методическое пособие / . – Самара: Самар. гос. техн. ун-т, 2012. – 90 с.: ил.
Рассмотрены вопросы выбора, пуска, управления и защиты электродвигателей в сфере электрохозяйства промышленных и сельхоз. предприятий, а также автономных объектов.
Учебно-методическое пособие рекомендуются для студентов специальности 050501 "Профессиональное обучение (электротехника, электроэнергетика и электротехнологии)", а также неэлектротехнических специальностей очной и заочной форм обучения, аспирантов, руководителей и специалистов энергетических служб предприятий, инженеров, работающих в сфере обслуживания электрооборудования.
Составитель: доктор техн. наук ,
Рецензенты: кандидат техн. наук
© ,
2012
© Самарский государственный
технический университет, 2012
ПРЕДИСЛОВИЕ
Учебное пособие предназначено для изучения вопросов выбора электродвигателей, средств электропитания, устройств пуска, управления и защиты в сфере электрохозяйства промышленных и сельхоз предприятий, а также автономных объектов. Взаимозависимость этих вопросов усложняет решение задач производства промышленной продукции.
Выпуск конкурентоспособной продукции на промышленном предприятии возможен только при рациональном и эффективном преобразовании электроэнергии, что в значительной степени определяется надежным запуском, средствами электропитания, правильно выбранным управлением и качественной защитой электродвигателей. Ежегодно тарифы на электроэнергию растут приблизительно на 10 – 15% и поэтому заметно определяют себестоимость произведенных товаров и услуг. В учебном пособии в разделе «Выбор типоразмера асинхронного двигателя, средств электропитания и защиты» на основе материалов учебно-методического пособия приведены типовые расчеты для двигателей разных режимов работы.
Учебное пособие рекомендовано для студентов, изучающих курс «Электротехника и электроника», полезно студентам, изучающим курсы «Электрооборудование промышленных предприятий» и «Энергосбережение», выполняющих дипломные проекты, аспирантам, а также инженерно-техническим работникам, занимающимся эксплуатацией электроустановок промышленных предприятий и организаций.
ВВЕДЕНИЕ
На промышленных и сельхоз предприятиях, на автономных объектах надежная работа электрооборудования [1,5] является важнейшим фактором, который способствует выпуску высококачественной и конкурентоспособной продукции. Рациональная передача и распределение электроэнергии между потребителями в процессе производства, энергоэффективность электрооборудования во многом зависят от правильного выбора электродвигателей, устройств пуска и управления, а также средств защиты электрических цепей двигателей постоянного и переменного тока. Безаварийное и эффективное преобразование электрической энергии в механическую обеспечивают в настоящее время электрооборудование включающее в основном асинхронные и синхронные электродвигатели.
Неправильный выбор электромеханической части электрооборудования, средств управления и защиты приводит к существенным отклонениям уровня напряжения от номинальных значений, перекосу фаз, что вызывает нарушение процессов производства и приводят к потерям производимой продукции и дополнительным затратам электроэнергии. Для исключения аварийных ситуаций и случаев нарушения качества электроэнергии при выборе электромеханической части электрооборудования, средств управления и защиты необходимо учитывать особенности прокладки кабелей, современный арсенал пуско-регулирующих устройств и средств защиты электрооборудования.
На любом предприятии необходим штат специалистов, способных профессионально контролировать задачи выбора электродвигателей, средств управления и защиты с целью обеспечения непрерывности производства продукции и энергосбережения.
РАЗДЕЛ 1
выбор электродвигателей для оборудования с различными типами нагрузки
Выбор электродвигателя носит многокритериальный характер. Электрооборудование с электродвигателями должно достаточно полно соответствовать требованиям технологического процесса и удовлетворять условиям окружающей среды в процессе эксплуатации. В то же время следует выбирать наиболее простой электродвигатель по устройству и управлению, надежный в работе, имеющий по возможности меньшие массу, габариты и стоимость [2,3].
Выбор одного из каталожных типов электродвигателей считается правильным при соблюдении следующих условий:
а) наиболее полное соответствие электродвигателя рабочей машине (исполнительному механизму) по механическим свойствам. Это означает, что электродвигатель должен иметь такую механическую характеристику, при которой он мог бы сообщать исполнительному механизму необходимые величины скорости и ускорений в установившихся и переходных режимах;
б) максимальное использование мощности электродвигателя во всех режимах работы. Температура всех активных частей электродвигателя в наиболее тяжелых режимах работы должна максимально приближаться к допустимой по нормам температуре нагрева, но не превышать ее;
в) соответствие электродвигателя исполнительному механизму и условиям окружающей среды по конструктивному исполнению;
г) соответствие электродвигателя параметрам электропитания.
Для выбора электродвигателя необходимы следующие данные:
а) тип и наименование исполнительного механизма;
б) максимальная мощность на валу, если режим работы продолжительный и нагрузка постоянна, а в остальных случаях — графики изменения мощности или момента сопротивления на валу в функции времени;
в) частота вращения (или диапазон частот вращения) вала исполнительного механизма;
г) способ сочленения исполнительного механизма с валом электродвигателя (при наличии кинематических передач указываются род передачи и передаточное число);
д) величина пускового момента, которую должен обеспечить электродвигатель на приводном валу исполнительного механизма;
е) пределы регулирования частот вращения (верхнее и нижнее значения и соответствующие им величины мощностей и моментов);
ж) требуемое качество (плавность, ступенчатость) регулирования частоты вращения;
з) частота включений привода в течение часа;
и) характеристики внешней среды.
Выбор электродвигателя на основе учета всех условий и номинальных данных производится по каталогам.
Для механизмов широкого применения выбор электродвигателя значительно упрощается за счет содержащихся в соответствующих информациях заводов-изготовителей данных. Он сводится к уточнению типа электродвигателя применительно к параметрам сети, характеру нагрузки и окружающей среды.
В настоящее время коллекторные двигатели постоянного тока, ранее – основные двигатели при регулировании частоты вращения, вытесняются двигателями переменного тока. Поэтому основное внимание уделим двигателям переменного тока, в частности - двигателям с регулированием частоты вращения.
Тема 1.1. Двигатели переменного тока
По принципу действия и техническим характеристикам различают асинхронные (АД) и синхронные (СД) двигатели [1]. Их работа невозможна без создания вращающегося магнитного поля.
Условиями создания вращающегося магнитного поля являются – сдвиг в пространстве фаз обмотки машины переменного тока и сдвиг токов в этих фазах во времени.
Рассмотрим принцип создания вращающегося магнитного поля на примере трехфазной двухполюсной электрической машины переменного тока. Оси фаз А, В, С обмотки, расположенной в пазах цилиндрического сердечника, сдвинуты относительно друг друга на 120 электрических градусов. Токи фаз изменяются по синусоидальному закону:
![]() ,
,
![]() , (1.1)
, (1.1)
![]() .
.
На рис.1.1 представлен поперечный разрез якоря и индуктора синхронной машины с трехфазной обмоткой якоря, в проводниках которой указаны направления токов и ЭДС. Вращающийся явнополюсный ротор этой машины имеет индуктор с обмоткой, питаемой постоянным током, создающей магнитное поле по оси d – продольной оси.
Если изобразить векторами в пространстве мгновенные значения индукций каждой фазы и результирующую индукцию для моментов ωt=0, π/2, π, 3π/2, то с течением времени вектор результирующей магнитной индукции перемещается с угловой скоростью ω по направлению от оси фазы А к оси фазы В, т. е. в сторону чередования фаз. Таким образом происходит вращение магнитного поля в магнитопроводе электрической машины в направлении чередования фаз обмотки якоря. Для того, чтобы изменить направление вращения поля, достаточно поменять местами два провода, соединяющие фазы с источником.
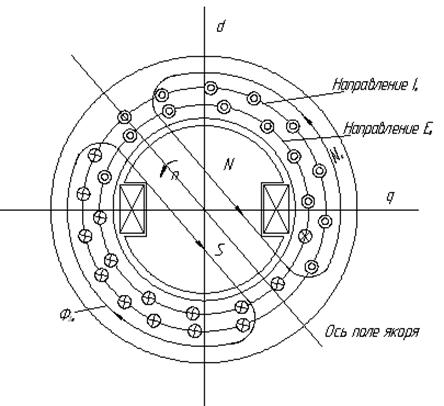
Рис. 1.1. Поперечное сечение активной части синхронной машины
Магнитное поле вращается со скоростью
 , (1.2)
, (1.2)
где f1 – частота тока статора,
р – число пар полюсов.
При стандартной частоте тока сети 50 Гц получим:
р = 1, n1 = 3000 об/мин,
р = 2, n1 = 1500 об/мин,
р = 3, n1 = 1000 об/мин,
р = 4, n1 = 750 об/мин и т. д.
Асинхронные машины. Асинхронной (АМ) называется электрическая машина, у которой в рабочем установившемся режиме магнитное поле и ротор вращаются с разными скоростями. АМ используются, главным образом, в качестве двигателей.
Устройство асинхронной машины. Неподвижная часть АМ называется статором, подвижная – ротором.
Сердечники статора и ротора собираются из листов электротехнической стали, которые до сборки обычно покрываются с обеих сторон изоляционным лаком. Сердечник статора закрепляется в корпусе, а сердечник ротора – на валу.
Вал ротора вращается в подшипниках, которые помещаются в подшипниковых щитах, прикрепляемых к корпусу статора. На внутренней цилиндрической поверхности статора и на внешней поверхности ротора имеются пазы, в которых размещаются проводники обмоток статора и ротора.
Обмотка статора асинхронной машины выполняется обычно трехфазной и присоединяется к трехфазной сети. Если обмотка ротора выполнена трехфазной, как на статоре, - концы фаз обмотки соединены в звезду, а начала фаз с помощью контактных колец и металлографитных или углеграфитных щеток выведены на неподвижную часть машины. Такую машину называют асинхронной машиной с фазным ротором.
Если в каждом пазу сердечника ротора находится медный или алюминиевый стержень и концы всех стержней с обоих торцов ротора соединены медными или алюминиевыми кольцами, которые замыкают стержни накоротко, то такую АМ называют машиной с короткозамкнутым ротором.
Воздушный зазор между статором и ротором в АМ выполняется минимально возможным по условиям производства и надежности работы и тем больше, чем крупнее машина. АМ, как правило, охлаждаются воздухом.
Принцип работы АМ основан на действии вращающегося магнитного поля (магнитного потока). Оно создается токами в фазах неподвижной обмотки статора (см. начало раздела). Круговое вращающееся магнитное поле представляет собой магнитное поле, вектор результирующей магнитной индукции которого имеет постоянную величину и вращается с некоторой угловой скоростью.
Магнитный поток, создаваемый токами в обмотке статора, при своем вращении пересекает проводники обмотки ротора и наводит в них ЭДС. Эти ЭДС вызывают токи в проводниках обмотки ротора. Эти токи стремятся своим магнитным полем ослабить вызвавшее их магнитное поле. В результате взаимодействия токов ротора с вращающимся магнитным потоком возникают силы F, действующие на проводники ротора с током, - силы Лоренца. Возникает вращающий электромагнитный момент М, действующий на ротор АМ и приводящий ротор во вращение, если электромагнитный момент М превышает тормозной момент на валу АМ.
Вращающий момент создается только активной составляющей фазного тока ротора:
![]() , (1.3)
, (1.3)
где I2 – действующее значение фазного тока ротора,
ψ2 – угол сдвига фаз между ЭДС и током фазы ротора.
Режимы работы АМ. В зависимости от частоты вращения и направления вращения ротора по отношению к полю различают 4 основных режима:
1. режим двигателя,
2. режим генератора,
3. режим идеального холостого хода,
4. режим противовключения (режим электромагнитного тормоза).
Используют также термин «номинальный режим работы» – это предельный режим, при котором двигатель не перегревается, иначе наступает увеличение температуры изоляции обмоток двигателя превышают допустимые, что приводит к ускорению старения изоляции и снижению срока службы двигателя.
Наиболее простыми в отношении устройства и управления, надежными в эксплуатации, имеющими наименьшие массу, габариты при заданной мощности являются асинхронные двигатели с короткозамкнутым ротором. Их масса на единицу мощности в 1,5-2,0 раза ниже, чем у машин постоянного тока [4].
Такие АД применяют для нерегулируемого электропривода или при ступенчатом регулировании частоты вращения. Для двигателей, которые работают с невысокой частотой включений, когда не требуется регулирование скорости в широких пределах, - применяют прямой пуск (см. тему 1.2.1).
В установках, где используется регулирование частоты вращения в диапазоне 1:2, 1:3, а также необходимы: плавный пуск с пониженными пусковыми токами, регулируемые тормозные режимы, ограничение токов в переходных процессах, относительно низкая стоимость, - находят применение асинхронные двигатели с фазным ротором.
Для механизмов, к которым предъявляются требования в отношении регулирования частоты вращения, качества переходных процессов, а также при напряженных режимах с частыми пусками и остановами, применяются электроприводы по системе «вентильный преобразователь – коллекторный двигатель постоянного тока», а в последнее время - по системе «вентильный преобразователь частоты - асинхронный двигатель».
Для механизмов средней и большой мощности (от 120кВт), где не применяется регулирование частоты вращения или необходимо ее постоянство, перспективным является использование синхронных двигателей. Они имеют абсолютно жесткую механическую характеристику, значительную перегрузочную способность, высокие энергетические показатели, и, что особенно важно, позволяют компенсировать реактивные мощности потребителей, работающих с отстающим коэффициентом мощности.
Синхронные двигатели относятся к синхронным машинам.
Синхронные машины.
У таких машин частота вращения ротора в нормальном установившемся режиме равна частоте вращения магнитного поля.
Рассмотрим устройство, условные обозначения и работу синхронных машин.
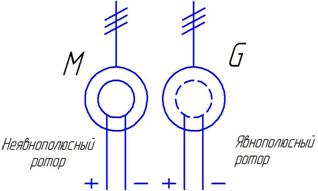 Неподвижный сердечник с обмоткой называют якорем (внешняя окружность на Рис. 1.2), он подобен статору асинхронных машин. На валу находится индуктор (внутренняя окружность на Рис. 1.2) с обмоткой постоянного тока.
Неподвижный сердечник с обмоткой называют якорем (внешняя окружность на Рис. 1.2), он подобен статору асинхронных машин. На валу находится индуктор (внутренняя окружность на Рис. 1.2) с обмоткой постоянного тока.
Рис. 1.2. Условные обозначения
синхронных машин
Как видно на Рис. 1.2, различают синхронные машины с неявнополюсным и явнополюсным ротором (индуктор последнего обозначается пунктиром). M – двигатель, G – генератор.
Работа синхронного генератора.
Когда ротор начинает вращаться с частотой вращения близкой к частоте вращения магнитного поля, - включают генератор на параллельную работу с сетью. Для этого подают постоянное напряжение на обмотку индуктора и выполняют условие синхронизации: разность напряжений между выводами генератора и выводами сети должна быть минимальной (несколько вольт). Если не соблюсти это условие, при включении возникают броски тока, от которых срабатывает защитная аппаратура. После включения генератора на параллельную работу с сетью, увеличивают мощность теплового двигателя или гидротурбины на валу генератора. Синхронный генератор преобразует механическую мощность, поступающую с на вала, в электрическую, которая поступает в сеть.
Работа синхронного двигателя.
Без дополнительных устройств синхронный двигатель не создаёт пускового момента (не запускается). Чаще всего применяют асинхронный пуск, для которого на роторе двигателя располагают дополнительную короткозамкнутую пусковую обмотку, токи в которой создают пусковой момент, разгоняющий двигатель до подсинхронной скорости (несколько меньшей скорости вращения магнитного поля).
После разгона включают напряжение постоянного тока на обмотку индуктора. Создаётся магнитное поле индуктора, которое сцепляется с магнитным полем якоря (созданного токами трёхфазной обмотки якоря), двигатель «втягивается» в синхронизм, т. е. начинает вращаться с частотой вращения магнитного поля.
При увеличении тормозного момента скорость двигателя (ротора) не изменится, изменится угловое положение ротора относительно поля. Угол между осью вращающегося магнитного поля якоря и продольной осью индуктора d называют углом нагрузки (см. Рис.1.1). Его обозначают – θ.
Тема 1.2. Режимы работы асинхронных двигателей
Для описания режимов работы используется величина, называемая скольжением (s).
Скольжение это разность между частотой вращения магнитного поля n1 и частотой вращения ротора n, отнесенная к частоте вращения магнитного поля:
 , (1.4)
, (1.4)
где ![]() (если n1 в с-1)
(если n1 в с-1)
Режим двигателя
Соответствует диапазону частот вращения ротора: 0 < n < n1 и диапазону скольжений: 0 < s < 1. При этом электромагнитный момент вращает двигатель в сторону вращения магнитного поля со скоростью меньше синхронной (n1).
Если n= 0 и, следовательно, s=1, то режим называют режимом короткого замыкания. Этот режим используется для определения параметров двигателя, т. е. активных и индуктивных сопротивлений схемы замещения, описывающей электрическую и магнитную цепи асинхронной машины.
Режим генератора
Соответствует диапазону частот вращения ротора: n1 < n и диапазону скольжений: -∞ < s < 0. При этом электромагнитный момент направлен в сторону, противоположную направлению вращения магнитного поля. Электромагнитный момент становится тормозным. Электрическая машина отбирает механическую мощность с вала приводного двигателя (например, ДВС) и преобразует ее в электрическую мощность, которая подводится к потребителю электроэнергии. Наблюдается при рекуперативном торможении АД.
Режим идеального холостого хода
Соответствует частоте вращения ротора n = n1 и s = 0. При этом нет пересечения магнитным полем проводников ротора, поэтому ЭДС ротора равна нулю, ток в роторе отсутствует, электромагнитный момент не создается. Этот режим не является рабочим. Он используется для определения параметров ЭМ.
Режим противовключения (режим электромагнитного тормоза)
Соответствует частотам вращения ротора АМ n < 0 и скольжениям ∞ > s > 1, при этом ротор АМ вращается в противоположную сторону относительно магнитного поля. АМ переходит в этот режим, если при вращающемся двигателе сменить чередование фаз обмотки статора. После этого ротор по инерции продолжит вращаться в прежнюю сторону, а магнитное поле меняет направление вращения. Частота вращения ротора начинает интенсивно снижаться (процесс торможения двигателя) и если при n = 0 отключить питание, закончится торможение двигателя противовключением. Если питание не отключать, ротор сменит направление вращения, т. е. произойдет реверс двигателя.
Тема 1.2.1. Пуск асинхронных двигателей с короткозамкнутым ротором
Процесс пуска асинхронных двигателей наблюдается после подключения двигателей к источнику электропитания. Различают следующие способы пуска асинхронных двигателей с короткозамкнутым ротором:
1) прямой пуск: обмотка статора двигателя подключается на номинальное напряжение сети. При прямом пуске токи могут превышать номинальные в 5-10 раз для двигателей мощностью более 1кВт, поэтому защиту от коротких замыканий «отстраивают» от пусковых токов, иначе двигатель может отключиться после подключения его к сети. Таким способом запускают двигатели до 100кВт. При большой мощности двигателей желательно ограничить пусковой ток, чтобы избежать недопустимых «просадок» напряжений сети при пусках таких двигателей.
2) пуск при пониженном напряжении можно осуществить с помощью реактора или вентильных (тиристорных) регуляторов напряжения.
а) реакторный пуск. При пуске двигателя последовательно с обмоткой статора включают пусковой реактор (ПР). За счет падения напряжения на ПР напряжение на статоре асинхронного двигателя уменьшается. Поэтому снижается пусковой ток двигателя. После разгона ПР шунтируют.
б) тиристорный пуск производится устройствами плавного пуска. Тиристорные регуляторы напряжения позволяют плавно изменять напряжение фаз статора и осуществлять бесконтактный пуск двигателя [1].
Достоинство тиристорного пуска: плавный регулируемый пуск с заданной кратностью пускового тока (![]() ).
).
Недостаток: появление в сети высших гармонических составляющих тока и напряжения, которые создают помехи при работе электронной аппаратуры. Для электромагнитной совместимости устройства плавного пуска с электронной аппаратурой необходима установка фильтров.
3) частотный пуск асинхронного двигателя: его применяют тогда, когда между сетью и двигателем включен преобразователь частоты для регулирования частоты вращения вала двигателя. Этим преобразователем плавно увеличивают частоту тока обмотки статора - от пусковой до номинальной. Двигатель разгоняется при значительном пусковом моменте и небольшом пусковом токе. Этот способ является самым энергетически экономичным, но дорог.
Тема 1.2.2. Пуск асинхронного двигателя с фазным ротором
У таких двигателей в большинстве случаев пусковой ток ограничивают с помощью пускового реостата в цепи ротора.
В начале пуска сопротивление реостата максимальное. Оно рассчитано так, чтобы ток при включении пускового реостата не превышал номинальный ток более чем в 2,5 раза. При этом двигатель развивает значительный пусковой момент. По мере разгона двигателя, уменьшают сопротивление пускового реостата в цепи ротора АД, что обеспечивает быстрый разгон двигателя [1].
В автономных энергоустановках, включающих АД с фазным ротором и рекуперацией мощности цепи ротора, пуск АД можно осуществить введением противоЭДС в цепь ротора с помощью ведомого сетью инвертора (см. тему 1.2.4). Здесь перспективен способ пуска с улучшенными показателями [6].
Тема 1.2.3. Выбор асинхронного двигателя для частотного регулирования
Регулирование частоты вращения асинхронного двигателя с короткозамкнутым ротором посредством изменения частоты тока в обмотке статора одно из самых перспективных технических решений в области регулируемого электропривода [8,9].
АДЧР - асинхронный двигатель для частотного регулирования
Асинхронные двигатели с частотным регулированием (АДЧР), предназначены для применения в регулируемом электроприводе.
Двигатели базового исполнения (АДЧР 0).
Электромагнитный тормоз, датчик частоты вращения или положения ротора, независимая вентиляция отсутствуют. Назначение: для использования в составе частотно-регулируемого привода, а так же в режиме питания от стандартной трехфазной питающей сети. Изготавливается во всех габаритных размерах двигателей.
Ограничения по применению: эффективное охлаждение обеспечивается начиная с выходной частоты инвертора порядка 30Гц, допустимая глубина регулирования примерно 1:3 (используется самовентиляция).
Примеры применения: в составе регулируемого привода для насосов, вентиляторов, конвейеров и т. п. или для применения в качестве замены обычных асинхронных двигателей.
Двигатели с независимой вентиляцией (АДЧР В)
Электромагнитный тормоз и датчик частоты вращения или положения ротора, отсутствуют. Назначение: для использования в составе частотно-регулируемого привода при продолжительной работе во всех диапазонах рабочих скоростей. Изготавливается во всех габаритных размерах двигателей.
Ограничения по применению: т. к. датчик частоты вращения или положения ротора в данной модификации отсутствует, то максимальная глубина регулирования с преобразователем частоты может составлять 1:10, при применении специальных типов инверторов до 1:20…40.
Примеры применения: конвейерные системы, центрифуги, автоматические линии и т. д.
Двигатели с электромагнитным тормозом (АДЧР Т)
Отсутствуют датчик скорости и независимая вентиляция.
Назначение: работа в составе частотно-регулируемого привода (статический тормоз) или с питанием от стандартной питающей сети (динамический тормоз) с необходимостью обеспечивать удержание вала двигателя при отключении силового питания двигателя, а так же в системах, требующих повышенной безопасности. Изготавливается во всех габаритных размерах двигателей.
Ограничения по применению:
1. Т. к. для охлаждения двигателя используется вентилятор установленный на валу двигателя (самовентиляция), эффективное охлаждение обеспечивается, начиная с выходной частоты инвертора порядка 30Гц, допустимая глубина регулирования примерно 1:3. Максимальная частота вращения – не выше номинальной.
2. При прямом питании от стандартной питающей сети 50/60Гц, требуется установка динамического тормоза.
Примеры применения: грузоподъемные механизмы, конвейерные системы, центрифуги, автоматические линии и т. д.
Двигатели с электромагнитным тормозом, датчиком частоты вращения или положения ротора, и независимой вентиляцией (АДЧР ТДВ)
Назначение: работа в составе частотно-регулируемого привода при необходимости обеспечения точного контроля частоты вращения, получения большой глубины регулирования, управления моментом и т. д. в диапазоне скоростей до 1:20…40, от 0 об/мин до максимальной. В технологических процессах, где требуется удержание вала двигателя при отключении питания двигателя или имеются требования по безопасности оборудования. Изготавливается во всех габаритных размерах двигателей.
Примеры применения: точное машиностроение, станки с ЧПУ, грузоподъемные механизмы, конвейерные системы, автоматические линии и т. д.
Двигатели с датчиком частоты вращения или положения ротора и независимой вентиляцией (АДЧР ДВ)
Электромагнитный тормоз отсутствует.
Назначение: работа в составе частотно-регулируемого привода при необходимости обеспечения большой глубины регулирования по скорости, точного контроля частоты вращения, управления моментом и т. д. в диапазоне частот вращения до 1:20…40 от 0 об/мин до максимальной. Изготавливается во всех габаритных размерах.
Примеры применения: точное машиностроение, станки с ЧПУ, грузоподъемные механизмы, конвейерные системы и т. д.
Тема 1.2.4. Регулирование частоты вращения асинхронного двигателя с фазным ротором
Регулирование путем включения реостата в цепь ротора сопровождается потерей энергии в реостате, что может существенно снизить энергетические показатели электропривода. Однако имеется возможность регулировать частоту вращения таких двигателей без потерь энергии в реостате. Для этого электрическую энергию, выделяющуюся в цепи ротора при скольжении (энергию скольжения), посредством преобразовательной установки передают обратно в питающую сеть переменного тока или к вспомогательному двигателю, который сообщает дополнительную механическую энергию валу основного асинхронного двигателя. Сочетание асинхронного двигателя с преобразовательной установкой или с преобразовательной установкой и вспомогательным двигателем называют асинхронным каскадом. В настоящее время в асинхронных каскадах применяют главным образом полупроводниковые преобразователи, поэтому их часто называют вентильными каскадами.
На рис. 1.3 показана электрическая схема асинхронного вентильного каскада, в котором в цепь ротора асинхронного двигателя 2 включены два полупроводниковых преобразователя — 3 и 4. Рассматриваемая схема позволяет регулировать частоту вращения электродвигателя вниз и вверх от синхронной частоты вращения (s = 0). При s > 0 преобразователь 4 работает в выпрямительном режиме, а преобразователь 3 — в инверторном. При этом электрическая мощность скольжения Ps от ротора асинхронного двигателя передается через преобразователь 4 на преобразователь 3, который преобразует постоянный ток в переменный и возвращает энергию скольжения в питающую сеть.
При регулировании вверх от синхронной частоты (s < 0) к ротору асинхронного двигателя через преобразователи 3 и 4 подается из сети дополнительная электрическая энергия. При этом двигатель начинает вращаться с частотой выше синхронной. Частота в рассматриваемом каскаде регулируется путем изменения режима работы преобразоваВыходная мощность Р2 двигателя передается рабочей машине 1. При этом, пренебрегая потерями в двигателе и принимая Рэм ≈ Р1 , определяем мощность, передаваемую рабочей машине:
Р2 ≈ Рмех ≈ Рэм (1 - s) ≈ P1 (1 - s), (1.5)
а развиваемый на ее валу вращающий момент при P1 = Рном = const
М ≈ Р2 /ω2 =P1 (1 - s)/[ω1 (1 - s)] = const. (1.6)
|
Рис.1.3. Функциональная схема асинхронного вентильного каскада |

В настоящее время асинхронные каскады используют главным образом в электроприводах с двигателями большой мощности при широком диапазоне регулирования частоты вращения.
Находят применение также каскадные схемы (рис. 1.4 - а, б), в которых энергия скольжения через выпрямитель подводится к двигателю постоянного тока.
В схеме электрического каскада (рис. 1.4, а) двигатель постоянного тока 4, получающий от асинхронного двигателя 2 через выпрямитель 5 энергию скольжения Ps , вращает генератор переменного тока 3, который возвращает эту энергию в сеть.
|
Рис. 1.4 Схемы электрического каскада а) и электромеханического каскада б) с машиной постоянного тока |
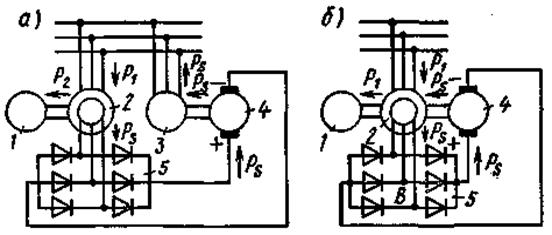
Эта схема аналогична схеме на рис.1.3, но применяемое электрооборудование имеет большую массу и уменьшенный КПД из-за использования вращающихся машин. Рабочей машине 1 при принятых выше идеализированных условиях передается мощность Р2 ≈ Р1(l — s) при постоянном моменте.
В схеме электромеханического каскада (рис. 1.4, б) двигатель постоянного тока 4 жестко соединен с валом асинхронного двигателя 2 и поэтому энергия скольжения преобразуется в механическую.
Недостатком каскадных схем с двигателями постоянного тока является относительно высокая стоимость коллекторных двигателей.
Тема 1.3. Перспективные регулируемые электродвигатели
В условиях переменной нагрузки и необходимости регулирования частоты вращения конкурентоспособными являются вентильные двигатели.
Вентильный двигатель (ВД) — это синхронный двигатель с вентильным преобразователем, работающий по принципу частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля якоря в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что питается такой двигатель от постоянного напряжения, а коллектор заменен вентильным преобразователем (автономным инвертором).
Принцип работы ВД основан на том, что вентильный преобразователь коммутирует обмотки якоря ВД так, чтобы вектор магнитного поля якоря был приблизительно ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) вентильный преобразователь управляет током, протекающим через обмотку якоря ВД, т. е. вектором магнитного поля якоря, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Коммутация фаз якоря производится так, что поток возбуждения ротора — Ф0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и потока индуктора создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием датчика положения ротора (ДПР) происходит переключение обмоток и поток якоря поворачивается в сторону вращения ротора.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
В последнее время, этот тип двигателей быстро приобретает области применения во многих отраслях промышленности. Находит применение в различных сферах: от бытового электрооборудования до рельсового транспорта.
ВД с электронными системами управления объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока:
- Широкий диапазон изменения частоты вращения;

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
