

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В таблице 2 представлена наиболее общая классификация ЗУ с указанием характерных особенностей каждого типа ЗУ. По принципу действия различают пять групп ЗУ. Самой разнообразной и часто применяемой является группа механических захватов.
Таблица 2
Классификация захватных устройств
По принципу действия | Механические | Магнитные | Вакуумные | С эластичными камерами | Струйные |
| |||||||||||||||||||||||
По типу привода | Бесприводные | Электрические | Гидравлическиеие | Пневматические | Магнитные | Электрические | Магнитные | Электрические | Пневматические | Магнитные | Гидравлическиеие | Пневматические | Пневматические | ||||||||||||||||
По типу передаточного механизма | Рычажно-стержневые | Кулисно-стержневые | Зубчатые | Клиновые (кулачковые, цанговые) | По способу обеспечения усилия захвата | По способу вакуумирования | По способу захвата | По способу захвата |
| ||||||||||||||||||||
С постоянными магнитами | С электромагнитами | С вращающимся магнитным полем | Безнасосные | Насосные | Оболочковые | Пальцевые | Однопальцевые | Многопальцевые |
| ||||||||||||||||||||
По наличию элементов компенсации погрешности позиционирования | Без элементов компенсации-жесткие | С активно компенсирующими элементами-гибкие | Жесткие | Гибкие | жесткие | гибкие | жесткие | гиб-кие |
| ||||||||||||||||||||
Поршневые | Диафрагменные | Тарельчатые | Сильфонные | Захват и базирование по гибким элементам | Захват гибким элементом с базированием по жесткому упору | Жесткие | Гибкие |
| |||||||||||||||||||||
По виду управления |
| ||||||||||||||||||||||||||||
Неуправляемые | Командные | Жескопрограммные | Адаптивные |
| |||||||||||||||||||||||||
По числу рабочих позиций |
| ||||||||||||||||||||||||||||
Однопозиционные | Многопозиционные |
| |||||||||||||||||||||||||||
По характеру крепления ЗУ к руке ПР |
| ||||||||||||||||||||||||||||
Несменяемые | Сменные | Быстросменные | Пригодные для автоматич. смены |
| |||||||||||||||||||||||||

а) 
Рис. 2.3.1. Универсальные двухпальцевые ЗУ со сменными губками:
а) стандартный; б) для захвата по наружной поверхности:
в) для захвата по внутренней поверхности
Рис.2.3.2. ЗУ для цилиндрических изделий различных диаметров с сохранением: а) положения оси; б) базирующих поверхностей
| Рис. 2.3.3. Схемы эксцентрикового ЗУ: а) для определения удерживающей силы; б) для определения основных параметров; в) расчетная схема рычажно - эксцентрикового ЗУ; г) построение логарифмической спирали профиля эксцентрика |
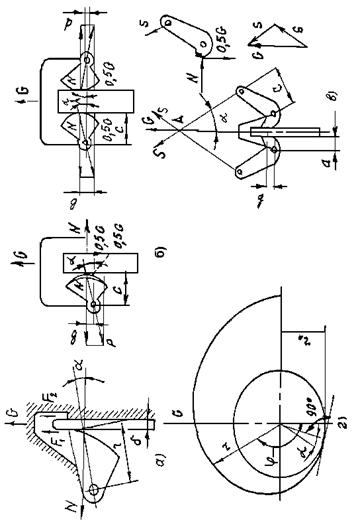
Рис. 2.3.4. Схемы клинового ЗУ:
1—конусообразный клин; 2—конический сегмент; 3—деталь; 4—подъемное звено; 5, 6—распорные элементы
а) б) в)
 |  |
 |
ж) з) и)
Рис.2.3.5. Безнасосные и насосные ВЗУ:
а) сильфонное;
б) диафрагменное;
в) поршневое;
г) тарельчатое;
д) с эжектором и дроссельной заслонкой ( открыта - притяжение);
е) закрыта - освобождение детали;
ж) с центрированием детали;
з)с запирающими шариками;
и) рельефные с микроприсосками
а) б) в)
г)
Рис. 2.3.6. Магнитные ЗУ:
а) универсальный с эластичной оболочкой; б) для захвата по наружной
поверхности; в) по внутренней; г) с вращающимся магнитным полем
а) б) в)
Рис. 2.3.7. Пневматические ЗУ:
а) для захвата по наружной поверхности; б) для захвата по внутренней
поверхности; в) с гофрированными односторонними полыми пальцами
Они отличаются по типу передаточного механизма: рычажно-стержневые (рис.2.3.1), кулисно-стержневые, зубчатые, клиновые (рис.2.3.2), кулачковые, цанговые (рис.2.3.4), эксцентриковые (рис.2.3.3). Детали в клиновых, цанговых, эксцентриковых ЗУ, удерживаемые силами трения без приводов, мало применяют в робототехнике из-за большого допуска на положение детали в ЗУ и усложнения процесса удаления детали из ЗУ. Однако они обладают рядом достоинств: автоматическая регулировка удерживающей, минимально необходимой силы захвата по реальному коэффициенту трения; простота и надежность, что при определенной доработке ЗУ, сопряженного станочного приспособления и тары гарантирует перспективу использования подобных ЗУ в определенных случаях. ВЗУ разделены на две группы: с гибкими камерами захвата ― тарельчатые, сильфонные (рис.2.3.5; г, а) и с жесткими - диафрагменные, поршневые (рис.2.3.5; б, в), которые в зависимости от способа создания разрежения в камерах захвата подразделяют на насосные и безнасосные. В насосных (рис.2.3.5; г, д, е, з) разрежение в вакуум-камере может создаваться насосами, вентиляторами, газодувками. Такие ЗУ более рациональны при транспортировке воздухопроницаемых грузов (бетона, керамики, дерева, вспененных пластмасс, различных огнеупорных изделий и т. д.) В безнасосных (рис. 2.3.5; а, б, в) вакуум создается одноразовым изменением объема полости вакуум-камеры. Они могут использоваться для транспортирования только воздухонепроницаемых изделий (металла, пластмассы, стекла и т. д.). Их основные преимущества перед насосными ВЗУ ― простота конструкции, отсутствие вакуум-насосной и распределительной аппаратуры, полная автономность. Магнитные ЗУ (МЗУ) по способу обеспечения усилия захвата разбиты на три подгруппы: с постоянными магнитами, с электромагнитами (рис.2.3.6; а, б, в), с вращающимся магнитным полем (рис. 2.3.6, г). Действие ЗУ с эластичными камерами основано на деформации камеры под действием давления воздуха или жидкости. Различают оболочковые и пальцевые ЗУ, которые в зависимости от того, базируется ли переносимое изделие по эластичной камере (рис.2.3.7; а, б) или эластичная камера обеспечивает прижим к ориентирующим, базирующим поверхностям (рис.2.3.7, в), либо позволяют достаточно эффективно компенсировать погрешности позиционирования, либо практически теряют эту возможность. Струйные ЗУ, представляющие собой малоизученный и редко пока применяемый класс, обеспечивают удержание детали за счет давления воздушного потока. Однопальцевые ЗУ используются для симметричных деталей с центральным отверстием, многопальцевые ― для деталей более сложной формы.
По типу привода ЗУ подразделяют на конструкции с пневмо-, гидро-, магнито - и электроприводом. Пневмопривод удобен простым подводом энергии к ЗУ (один шланг), при этом легко регулируется усилие зажима, ЗУ имеют возможность работать в агрессивных средах и в зоне высоких температур. Существенный недостаток пневмопривода ― большие габаритные размеры при сравнительно небольшом усилии захвата. Гидравлический привод обеспечивает большие усилия захвата, он компактен и легко регулируется, что предопределяет широкое его распространение. Электрический привод требует специальных малогабаритных двигателей постоянного тока, разработка которых для робототехники пока только ведется.
Рис. 2.3.8. Групповое ЗУ с базовыми отверстиями и упругим элементом
По числу рабочих позиций захваты всех типов разделяют на однопозиционные (имеющие одну рабочую позицию) и многопозиционные (имеющие несколько рабочих позиций) (рис.2.3.8).
Рис. 2.3..9. Устройство для компенсации относительной погрешности положения ЗУ
а) б)
Рис. 2.3.10. ЗУ с регулируемыми «пальцами»:
а) конструкция схвата; б) конструкция «пальца»
а)
А-А
б)
Рис. 2.3.11. Различные варианты ЗУ с активнокомпенсирующими элементами:
а) вариант 1;
б) вариант 2
Наличие в ЗУ элементов компенсации погрешности позиционирования значительно расширяет технологические возможности ЗУ и сферу применения оборудованных ими ПР (рис.2.3.9-2.3.11).
По виду управления ЗУ подразделяются на четыре группы. Неуправляемые ЗУ ― устройства с постоянными магнитными, вакуумными присосками, без принудительного разрежения или бесприводные механические ЗУ. Для снятия объекта с таких ЗУ требуется усилие большее, чем усилие его удержания. Командные ЗУ управляются только командами на захватывание или отпускание объекта. Разжимаются и зажимаются губки за счет взаимодействия их с объектом манипулирования или элементами внешнего оборудования. Жестко программируемые ЗУ управляются системой управления ПР. Величина перемещения губок, взаимное расположение рабочих элементов, усилие зажима меняются в зависимости от заданной программы ПР, которая может управлять и действием вспомогательных технологических приспособлений. Адаптивные ЗУ ― программируемые устройства, оснащенные различными датчиками внешней информации (для определения формы поверхности и массы объекта, усилия зажима, наличия проскальзывания объекта относительно рабочих элементов ЗУ и т. д.).
По характеру крепления к руке ПР все ЗУ делятся на четыре группы. Несменяемые ЗУ ― устройства, являющиеся неотъемлемой частью конструкции ПР, замена которых не предусматривается.
Рис.2.3.12. Места крепления сменных ЗУ (табл. 10)
Сменные ЗУ ― самостоятельные узлы с базовыми поверхностями для крепления к руке ПР, не предусматривающие быстрой замены (например, установка на фланце с помощью нескольких винтов см рис.2.3.12). Быстросменные ЗУ ― конструкция базовых поверхностей для крепления ЗУ к ПР обеспечивает их быструю смену (например, исполнение в виде байонетного замка, рис.2.3.13). Пригодные для автоматической смены ЗУ ― конструкция базовых поверхностей обеспечивает возможность их автоматического закрепления на руке ПР.
Рис. 2.3.13. Места крепления быстросменных ЗУ (табл.10):
1—гнездо, выполненное в руке ПР; 2—хвостовик ЗУ;
3—приспособление угловой фиксации ЗУ относительно руки ПР
2.4. АНАЛИЗ СИЛ, ДЕЙСТВУЮЩИХ НА ПЕРЕМЕЩАЕМЫЙ
ОБЪЕКТ
Для обеспечения надежности захвата детали жестким ЗУ (т. е. не оснащенным упругими элементами) необходимо, чтобы удерживающая сила на губках была больше векторной суммы всех сил, действующих на перемещаемый предмет. Результирующая сдвигающая сила R складывается из:
1) силы веса G=mg (где m ― масса перемещаемой детали, кг; g=9,81 м/с2 ― ускорение свободного падения), постоянной по величине и направленной вертикально вниз;
2) силы инерции Ри=mа (где а ― ускорение перемещения детали, возникающее при разгоне и торможении ПР, м/с2), направленной коллинеарно вектору ускорения а;
3) силы аэродинамического сопротивления Pa=kSyV2 (k ― коэффициент пропорциональности; Sy ― площадь перемещения детали, м2; V ― скорость перемещения, м/с), учитываемой при скорости более 0,30 м/с и направленной коллинеарно вектору скорости V; прочих сил Nnp (возникающих при сборке, установке детали в приспособление, инструмента в магазин, для нежестких ЗУ ― реакция в упругих элементах).
2.5. КОНСТРУКТИВНО-ТЕХНОЛОГИЧЕСКИЕ ОСОБЕННОСТИ ЗУ
В большинстве случаев транспортируемые детали захватываются двумя пальцами, расположенными друг против друга, и их положение регулируется устройством, способным создавать усилие сжатия, достаточное для надежной фиксации детали. Обычно стремятся ограничить число степеней свободы детали выбором точек зажима кулачками соответствующей формы, при этом стараются избегать статической неопределенности ЗУ, уменьшая число контактных поверхностей. Опыт создания ЗУ показывает, что требуются губки с определенной поверхностью, обеспечивающие ориентацию перемещаемых деталей и предотвращающие излишнее усилие зажима и преждевременный их износ. Если детали тонкие и форма их не позволяет производить захват за боковые стенки, то применяют ВЗУ или МЗУ (табл.3).
Таблица 3
Сравнительные характеристики МЗУ и ВЗУ
Электромагнитные ЗУ | Вакуумные ЗУ |
Пригодны только для намагничивающих-ся материалов Возможна большая сила притяжения на единицу поверхности Высокая точность базирования благодаря жесткости сердечника Сопутствует остаточный магнетизм, вызывающий опасность загрязнения и повреждения поверхностей детали и захватного устройства Быстрота захватывания детали Простота конструкции: катушка и сер-дечник могут быть легко изготовлены потребителем Катушки нагреваются, но конструкция долговечна | Пригодны только для гладких поверхностей всех материалов Обеспечивают ограниченную силу притяже-ния для данной площади Пониженная точность базирования из-за эластичности присосок Необходимо исключить наличие частиц между присосками и поверхностью детали Требуется некоторое время для создания необходимого вакуума Конструкция более сложная: необходима герметичность соединений, требуются при-соски и трубопроводы Срок работы конструкции ограничен |
Для ВЗУ и МЗУ площадь контакта, коэффициент трения и масса детали должны находиться в определенном соотношении. Для этих типов ЗУ рекомендуется применять конструкции, объединяющие функции захвата и позиционирования.
ЗУ с эластичными камерами применяют для переноса хрупких изделий небольшой массы, имеющих неправильную форму или значительные отклонения формы и размеров. Деталь при этом удерживается как за наружную, так и за внутреннюю поверхности.
Струйные ЗУ используются для легких деталей. Наиболее рациональная область применения ― роботизированная сборка. Наиболее производительная сборка ― одновременный захват нескольких деталей.
2.6. РАСЧЕТ МЕХАНИЧЕСКИХ ЗАХВАТНЫХ УСТРОЙСТВ
Расчет механических ЗУ включает шесть этапов. Это определение:
1) силовых и кинематических передаточных отношений выбранной схемы ЗУ;
2) необходимого усилия привода;
3) необходимого усилия захвата;
4) сил, действующих в местах контакта;
5) контактных напряжений;
6) допустимых крутящих и изгибающих моментов на местах крепления ЗУ.
2.6.1. КИНЕМАТИЧЕСКИЕ СХЕМЫ СТЕРЖНЕВЫХ МЕХАНИЗМОВ ЗУ

Рис. 2.6.1.1. Схемы ЗУ:
а) кинематическая; б) расчетная; в) сил и моментов на звене ВС; г) сил и моментов на звене BD
Рычажно-стержневые схемы проанализированы на примере рычажно-стержневой схемы, показанной на рис. 2.6.1.1, а. Привод ЗУ от гидроцилиндра. Силовое передаточное отношение схемы:
Кр = F/P, где F ― усилие на губках; Р ― движущая сила.
Из соотношения работ dF F=dP Ph получим, что КP = η/Кd, где: dF, dP ― перемещение соответственно губок и штока цилиндра; η ― КПД механизма; Кd =dF/dP ― кинематическое передаточное отношение.
Для получения выражения силового передаточного отношения проведем силовой анализ механизма. Рассмотрим схемы сил и моментов, действующих на ведущее звено механизма при зажиме детали (см. рис. 2.6.1.1).
Моменты сил трения в шарнирах:
![]() (2.6.1.1)
(2.6.1.1)
где: d ― диаметр осей шарниров; р ― угол трения. Для применяемых на практике размеров звеньев и углов можно принять:
 (2.6.1.2)
(2.6.1.2)
Из условий равновесия звена ВС:
 ; (2.6.1.3)
; (2.6.1.3)
где: α ― угол между вертикалью и звеном ЕС при закрытом ЗУ. Из условий равновесия звена BD:
 . (2.6.1.4)
. (2.6.1.4)
Тогда из уравнения (2.6.1.3) и (2.6.1.4):
 . (2.6.1.5)
. (2.6.1.5)
Исключая малые величины, получим КПД при tg p ≤ 1:
 ; (2.6.1.6)
; (2.6.1.6)
 . (2.6.1.7)
. (2.6.1.7)
Величина Кр в немалой степени зависит от угла α. Наибольшее значение Кр может быть получено при малых α. Однако соблюдение в конструкции ЗУ точного значения α затруднено из-за ошибок сборки (особенно при установке губок) и деформации деталей. При невыдержанном точно малом значении α шарнир С может пройти "мертвое" положение (когда звено ВС и ведущее звено сольются в одну прямую) и тогда губки раскроются. Точность размеров звеньев и координат расположения неподвижных шарниров должна строго соблюдаться. В противном случае сила зажатия детали может быть далека от расчетной, а потери на трение в шарнирах велики. К недостаткам схемы можно отнести большие потери на трение при малом α. В приложениях 1, 2, 3, 4 приведены примеры кинематических схем стержневых механизмов и формулы их передаточных отношений.
2.6.2. РАСЧЕТ УСИЛИЙ ПРИВОДА
Соотношения между силой Р привода, силами F или моментом М
Рис. 2.6.2.1. Расчетная схема рычажно-стержневого механизма
на губках ЗУ определяют из условий статического равновесия. Так, для захвата с рычажным механизмом, показанным на рис.2.6.2.1, из условия å F= 0 в точке С имеем F23 + F5 ― Р=0, откуда F23=P/2siny. Из условия åF= 0 относительно точки А следует:
![]() .
.
При известном моменте М сила привода:
 ; (2.6.2.1)
; (2.6.2.1)
 где: Mj — момент сил на губке; b — плечо рычага; n — число губок. Данный захват обладает эффектом самоблокировки, так как рычаг проходит через "мертвое" центральное положение.
где: Mj — момент сил на губке; b — плечо рычага; n — число губок. Данный захват обладает эффектом самоблокировки, так как рычаг проходит через "мертвое" центральное положение.
Рис. 2.6.2.2. Расчетная схема реечного механизма
В некоторых случаях удобен метод расчета, основанный на определении работы при малых перемещениях. Применяя этот метод к расчету захватного устройства с реечным механизмом (рис.2.6.2.2), получим: PV/2=FVca, где V = Rw; VCB = lwcosq:
![]() (2.6.2.2)
(2.6.2.2)
Здесь w ― угловая скорость звена 2; R — радиус зубчатого сектора; VCB — вертикальная скорость в точке С, равная скорости в точке А.
Для рассмотренного на рис.2.6.2.2 захвата сила привода может быть определена также через наибольший момент Mj:
 ; (2.6.2.3)
; (2.6.2.3)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
