

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Допустимые крутящие моменты (Н×м) для мест крепления сменных ЗУ, согласно РТМ 2 Р00-1-78
Исполнение | Диаметр базового отверстия, мм | |||||||
10 | 20 | 40 | 60 | 90 | 120 | 160 | 200 | |
1 2 | 4 4,4 | 12 12 | 30 30 | 80 80 | 310 180 | 400 230 | 770 440 | 1 |
Таблица 13
Основные размеры (мм) мест крепления быстросменных ЗУ, согласно РTM 2 Р00-1-78
d | D | L | l1 | l2 | В1 | В2 |
20 30 40 50 60 | 32 44 56 68 80 | 40 60 85 100 120 | 7 9 9 9 11 | 6 8 8 8 10 | 20 30 40 50 60 | 21 31 41 51 61 |
2.7. РАСЧЕТ ВАКУУМНЫХ ЗАХВАТНЫХ УСТРОЙСТВ
Расчет ВЗУ предполагает определение:
1) равнодействующей всех внешних сил, отрывающих деталь от ВЗУ;
2) минимально допустимой силы притяжения ВЗУ;
3) требуемой площади и размеров присосов.
2.7.1. РАСЧЕТ РАВНОДЕЙСТВУЮЩЕЙ
В процессе захвата, подъема и перемещения груза грузоподъемность ВЗУ не остается постоянной ― она зависит от соотношения сил P, N и Т, удерживающих груз, стремящихся оторвать его и сдвинуть соответственно.
а) б)
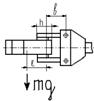
Рис. 2.7.1.1. Взаимодействие сил при подъеме и транспортировании груза:
а) горизонтальное положение ЗУ с грузом;
б) вертикальное положение ЗУ с грузом
Рис. 2.7.1.2. Расчетная схема ВЗУ для определения снижения его грузоподъемности | Рис. 2.7.1.3. Схема нагружения ВЗУ при внецентренном положении груза |
Наиболее часто встречаются в практике два положения ЗУ с грузом: горизонтальное (рис.2.7.1.1, а) и вертикальное (рис.2.7.1.1, 6).
Равнодействующую Ro всех внешних сил (статических от массы груза G, динамических Рд, ветровых Pв и др.), отрывающих груз от ЗУ, можно разложить на составляющие: нормальную N и касательную Т. Характерны следующие случаи:
1) подъем в вертикальном направлении, когда сила тяжести по направлению совпадает с силой прижатия к ЗУ (рис.2.7.1.1, а; стрелка 1):
N = Q + PД + PВ; T = 0 ;
2) перемещение в горизонтальном направлении ― сила прижатия к ЗУ и сила тяжести (стрелка 2) находятся на одной оси:
N = Q; T = PД + PВ = TT ,
где: Тт` = (Р - N) f ― сила трения между грузом и ЗУ; f ― коэффициент трения между поверхностями груза и контактирующей с ним присоской;
3) подъем в вертикальном направлении (при боковом захвате), когда сила тяжести направлена под прямым углом к силе прижатия к ЗУ (рис.2.7.1.1, б; стрелка 3):
![]() ;
;
4) перемещение в горизонтальном направлении (при боковом захвате), когда сила тяжести направлена под прямым углом к силе прижатия к ЗУ (стрелка 4):
![]() ,
, ![]() ;
;
5) наклонное положение груза при его перемещении, когда сила тяжести направлена под углом к силе прижатия груза к ЗУ (рис.2.7.1.3).
В приведенные выше формулы, определяющие значение Тт входит параметр f ― коэффициент трения, значения которого приведены в таблице 14.
Таблица 14
Значения коэффициента трения f
Материал | f |
Сталь по губчатой резине | 0,3-0,5 |
Сталь с поверхностной ржавчиной и окалиной по губчатой резине | 0,5-0,7 |
Сталь по мягкой резине | 0,3-0,5 |
Синтетические полимерные материалы (стекло-пластик и т. п.) по мягкой резине | 0,3-0,5 |
Стекло, полированный мрамор по губчатой резине | 0,3-0,4 |
Синтетические полимерные материалы по губчатой резине | 0,4-0,6 |
Примечания:
1. Значения коэффициентов трения получены для сухих поверхностей. При поверхностях, смоченных водой, коэффициент трения уменьшится примерно вдвое.
2. Поверхность груза (если нет оговорок) подразумевается гладкой, плотной.
3. Нижние пределы коэффициента трения относятся к давлению на контактирующих поверхностях 3 МПа и более; верхние пределы — к меньшему давлению. Влияет также степень шероховатости.
2.7.2. РАСЧЕТ УДЕРЖИВАЮЩЕГО УСИЛИЯ
Для надежного удержания груза ВЗУ необходимо, чтобы составляющие удерживающих сил были больше соответствующих сил отрыва, т. е. P > N или P = KN×N; Т'т > Т и Т"т > Т или Т'т = КтТ; Т"т > КтТ, где KN и Кт ― соответственно коэффициенты запаса по силам отрыва и сдвига груза.
Для нормальной работы ВЗУ необходимо, чтобы разница между силой Р (прижатия груза) и N (нормальной составляющей силы отрыва) была достаточной для создания давления q в контакте уплотнения присоски и поверхности груза, обеспечивающего герметизацию камеры: Р ― N = q×Sy, где Sy ― контактная площадь уплотнения.
Необходимое давление на герметизирующей кромке присоски при ее контакте с грузом зависит как от материала уплотнения, так и от шероховатости груза. Предельное значение силы N, при которой сохраняется достаточное для герметизации давление qmin в контакте уплотнения присоски и поверхности груза при известной силе вакуумного притяжения, можно определить из условия: N = P = qmin×Sy. Значения qmin для некоторых видов уплотнения приведены в табл.15.
Для получения надежной герметизации поверхности груза по плоскости уплотнения последнее должно подвергаться деформации сжатия на определенную величину, которая зависит в основном от материала уплотнения и шероховатости поверхности груза.
Таблица 15
Необходимое давление qmin (МПа) на герметизирующей контактной площади уплотнения ВЗУ
Поверхность груза | Материал присоски | ||||
Губчатая резина ТУ-109Р-ТИ | Губчатая резина РПТУ-1192 | Резиновая смесь 1432А | Резина ГОСТ | Резина 7889 | |
Стальной прокат: чистый с окалиной | 0,05-0,10 0,10-0,12 | 0,06-0,12 0,10-0,14 | 0,10-0,20 0,15-0,28 | 0,15-0,25 — | 0,30-0,04 — |
Текстолит | 0,04-0,06 | 0,05-0,06 | 0,06-0,09 | — | 0,30-0,4 |
Оргстекло | 0,05-0,05 | 0,05-0,06 | 0,07-0,10 | 0,08-0,11 | __ |
Слоистый пластик | 0,04-0,06 | 0,05-0,06 | 0,06-0,08 | 0,08-0,09 | __ |
Предельно допустимое значение силы N отрыва груза зависит не только от площади Sy и разрежения воздуха Р0, но и от давления уплотнителя на площади контакта qmin. Зависимость между этими значениями и силой притяжения Р имеет вид:
![]()
где: Р — сила притяжения ВЗУ;
SY = K1 S - площадь контакта уплотнителя с грузом;
x, — коэффициент снижения грузоподъемности ВЗУ.
Следовательно:
![]() . (2.7.2.1)
. (2.7.2.1)
Из рис.2.7.1.2 видим, что Sy = p (D2 × d2)/4 и S = p d2/4, тогда по ширине уплотнения b:
![]() ; (2.7.2.2)
; (2.7.2.2)
 . (2.7.2.3)
. (2.7.2.3)
При заданном минимальном значении KN и Кт необходимую силу вакуумного притяжения рекомендуется определять по формулам:
![]() ;
; ![]() . (2.7.2.4)
. (2.7.2.4)
Для ВЗУ, не связанного с определенными условиями работы, с некоторым допущением в сторону увеличения можно принять:
![]() ; (2.7.2.5)
; (2.7.2.5)
при Кт = KN = К. Чтобы гарантировать надежность работы ВЗУ в нормальных условиях, можно принять коэффициент запаса К = 2. Фактические значения коэффициентов запаса в зависимости от силы отрыва и сдвига груза можно проверить по формулам (2.7.2.4).
2.7.3. РАСЧЕТ РАЗМЕРОВ ПРИСОСОК
Площадь присосок и разрежение в них определяют из уравнений:
![]()
![]() ;
;  ; (2.7.3.1)
; (2.7.3.1)
где: Ра, Pb ― соответственно атмосферное и остаточное давление внутри камеры, Па; n ― количество присосок в ЗУ; So ― площадь присоски, м2.
В ряде случаев, особенно при подъеме груза несимметричной формы, центр действия ВЗУ смещается относительно центра тяжести груза (рис.2.7.1.3).
Снижение грузоподъемности ВЗУ (при внецентренном положении груза):
![]() . (2.7.3.2)
. (2.7.3.2)
При действии на ЗУ только силы N или Т коэффициенты увеличения площади захвата соответственно будут равны:
![]() ;
;  . (2.7.3.3)
. (2.7.3.3)
При совмещении трех движений (подъема руки ПР, поворота руки в горизонтальной плоскости и выдвижения руки) допустимая масса заготовки рассчитывается по формуле:
 ; (2.7.3.4)
; (2.7.3.4)
где: d ― диаметр входного отверстия присоски у среза; Кн ― коэффициент надежности удержания (Кн = 1,5 - 2); an ― ускорение подъема заготовки; g ― ускорение свободного падения; r ― расстояние от оси вращения руки до центра заготовки; e ― угловая скорость руки;
аВЫД ― ускорение при выдвижении руки.
ЛИТЕРАТУРА
1. Козырев роботы: Справочник. ― М.: Машиностроение, 19с.
2. Захватные устройства промышленных роботов: Метод. Указания / сост. ; - М.: МВТУ, 19с.
3. Белянин роботы. ― М.: НИАТ, 19с.
Приложение 1. Примеры кинематических схем рычажно-стержневых
механизмов и формулы их передаточных отношений
Расчетные схемы и формулы | |
1.
| 4.
|
2.
| 5.
|
3.
| 6.
|
Приложение 2. Примеры кинематических схем кулисно-стержневых
механизмов и формулы их передаточных отношений
Расчетные схемы и формулы | |
1.
| 4.
|
2.
| 5.
|
3.
| 6.
|
Приложение 3. Примеры кинематических схем зубчатых механизмов
и формулы их передаточных отношений
Расчетные схемы и формулы | |
1.
| 3.
|
2.
| 4.
|
Приложение 4. Примеры кинематических схем клиновых механизмов и формулы их передаточных отношений
Расчетные схемы и формулы | |
1.
| 2.
|
Приложение 5. Расчет усилий привода
Расчетные схемы и формулы | |
1.
| Общий случай
Для симметричных губок
m=2; hr=0,9; b=4+8°; r=1°10’; r=3 для подшипников скольжения, качения |
2.
| Общий случай
Для симметричных губок
hr=0,9 – 0,95 |
3. | Общий случай
Для симметричных губок
hr=0,94 |

Приложение 6. Значение коэффициента Кз для различных положений детали
V-образные губки. Круглое сечение детали | К3 | Плоские губки. Прямоугольное сечение | К3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|





СОДЕРЖАНИЕ
1.ОБЩИЕ ПРЕДСТАВЛЕНИЯ О ПРОМЫШЛЕННЫХ РОБОТАХ И МАНИПУЛЯТОРАХ…………………………………………………………4
1.1. КЛАССИФИКАЦИЯ РОБОТОВ…………………………………….….4
1.2. ЦЕЛЕВЫЕ МЕХАНИЗМЫ РОБОТОВ.………………………………...6
1.3. СИСТЕМЫ УПРАВЛЕНИЯ РАБОТОЙ РОБОТОВ.……………..…..10
1.4. КИНЕМАТИКА И КОМПОНОВКА РОБОТОВ……………………..12
2. ВЫБОР И РАСЧЕТ ЗАХВАТНЫХ УСТРОЙСТВ ПРОМЫШЛЕННЫХ РОБОТОВ……………………………………………………………………18
2.1. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ ………………………………18
2.2. ЗАХВАТНЫЕ УСТРОЙСТВА. ОБЩИЕ СВЕДЕНИЯ ……………..19
2.3. КЛАССИФИКАЦИЯ ЗАХВАТНЫХ УСТРОЙСТВ…………………20
2.4. АНАЛИЗ СИЛ, ДЕЙСТВУЮЩИХ НА ПЕРЕМЕЩАЕМЫЙ ОБЪЕКТ…………………………………………………………………………...36
2.5. КОНСТРУКТИВНО-ТЕХНОЛОГИЧЕСКИЕ………………………...36
2.6. РАСЧЕТ МЕХАНИЧЕСКИХ ЗАХВАТНЫХ УСТРОЙСТВ………...37
2.6.1. КИНЕМАТИЧЕСКИЕ СХЕМЫ СТЕРЖНЕВЫХ МЕХАНИЗМОВ ЗУ… 38
2.6.2. РАСЧЕТ УСИЛИЙ ПРИВОДА……………………………………...41
2.6.3. ОПРЕДЕЛЕНИЕ УСИЛИЯ ЗАХВАТА ЗУ…………………………43
2.6.4. ОПРЕДЕЛЕНИЕ СИЛ, ДЕЙСТВУЮЩИХ В МЕСТАХ КОНТАКТА ЗАГОТОВКИ И ЭЛЕМЕНТОВ ЗУ…………………………………….45
2.6.5. ОПРЕДЕЛЕНИЕ НАПРЯЖЕНИЙ НА ПОВЕРХНОСТЯХ КОНТАКТА ЗУ С ОБЪЕКТОМ МАНИПУЛИРОВАНИЯ…………………….47
2.6.6. РАСЧЕТ ЭКСЦЕНТРИКОВОГО ЗАХВАТНОГО УСТРОЙСТВА.49
2.6.7. КЛИНОВЫЕ ЗАХВАТНЫЕ УСТРОЙСТВА……………………….50
2.6.8. КРЕПЛЕНИЕ ЗАХВАТНЫХ УСТРОЙСТВ………………………..50
2.7. РАСЧЕТ ВАКУУМНЫХ ЗАХВАТНЫХ УСТРОЙСТВ……………..52
2.7.1. РАСЧЕТ РАВНОДЕЙСТВУЮЩЕЙ………………………….……..53
2.7.2. РАСЧЕТ УДЕРЖИВАЮЩЕГО УСИЛИЯ…………………….……55
2.7.3. РАСЧЕТ РАЗМЕРОВ ПРИСОСОК…………………………….……57
ЛИТЕРАТУРА……………………………………………………………….59
ПРИЛОЖЕНИЕ 1……………………………………………………………60
ПРИЛОЖЕНИЕ 2……………………………………………………………61
ПРИЛОЖЕНИЕ 3……………………………………………………………62
ПРИЛОЖЕНИЕ 4……………………………………………………………62
ПРИЛОЖЕНИЕ 5……………………………………………………………63
ПРИЛОЖЕНИЕ 6……………………………………………………………64
Ярослав Николаевич Отений
Павел Васильевич Ольштынский
ВЫБОР С РАСЧЕТ ЗАХВАТНЫХ УСТРОЙСТВ
ПРОМЫШЛЕННЫХ РОБОТОВ
Учебное пособие
Редактор
Темплан 2000 г., поз. №69.
Лицензия ЛР № 000 от 01.01.2001 г.
Подписано в печать ______. Формат 60х84 1/16.
Бумага газетная. Печать офсетная. Усл. печ. Л. 3,72.
Уч.-изд. Л. 3,99. тираж 100 экз. Заказ ______.
Волгоградский государственный технический университет.
400131 Волгоград, просп. им. , 28.
РПК «Политехник»
Волгоградского государственного технического университета.
400131 Волгоград, ул. Советская, 35.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
