

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() , (3)
, (3)
где τ нач – начальный перегрев двигателя;
τ уст – установившееся превышение температуры двигателя;
Тн – постоянная времени нагрева или охлаждения двигателя, Тн=С/А (определяет время достижения установившейся температуры, двигатели большей мощности и габаритов имеют и большую Тн).
Если τ нач=0, то (3) принимает вид
![]() . (4)
. (4)
Физический смысл постоянной времени нагрева состоит в том, что она равна времени нагрева двигателя до установившегося превышения температуры τуст, если бы отсутствовала отдача тепла в окружающую среду.
На рисунке 1 представлены кривые нагрева двигателя при τнач=0 и τнач>0. Там же иллюстрируется один из способов определения постоянной времени нагрева равной отрезку, заключенному между перпендикуляром к оси абсцисс, проведенным через точку касания касательной к кривой и точкой пересечения этой касательной с асимптотой.
Практически процесс нагрева можно считать установившемся, когда превышение температуры достигнет (0,95…0,98) τуст за время
tуст=(3…4)Тн. (5)
При охлаждении двигателя, вызванном его остановкой, условия теплоотдачи изменяются, изменяется и постоянная времени охлаждения
То=С/βоА=Тн/βо, (6)
где βо – коэффициент ухудшения теплоотдачи (βо=1 с независимой вентиляцией, βо=0,5 для самовентилируемых двигателей).
Все выражения, характеризующие нагрев применимы и для охлаждения двигателей, лишь с заменой τуст, τнач и постоянной времени То.
 |
Рисунок 1 – Кривые нагрева для: 1- τнач>0; 2 -τнач= 0
При выполнении тепловых расчетов принимается стандартная температура окружающей среды, равная 400С, которой соответствует номинальная мощность двигателя, указанная в паспорте.
При температуре окружающей среды отличной от 400С производится перерасчет мощности
 , (7)
, (7)
где ![]() - фактическая температура окружающей среды.
- фактическая температура окружающей среды.
2 Классификация режимов работы ЭП
Различные условия работы производственных механизмов обуславливают различные режимы работы электроприводов, которые классифицируются на восемь режимов с условными обозначениями S1…S8.
Первые четыре S1…S4 являются основными.
S1 – продолжительный режим работы. Режим электрической машины при неизменной нагрузке, продолжающийся столько времени, что превышение температуры достигает установившегося режима (рисунок 2).
 | |
| |
S2 – кратковременный режим работы. Такой режим, при котором периоды неизменной номинальной нагрузки чередуются с периодами отключения машины, при этом периоды нагрузки не настолько длительны, чтобы превышения температуры машины могли достигнуть установившихся значений, а периоды остановки настолько длительны, что все части ее охлаждаются до температуры окружающей среды (рисунок 3). В этом режиме гостируются следующие продолжительности рабочего периода: 10, 30, 60, 90 минут.
 | |
| |
S3 – повторно-кратковременный режим работы. Такой режим при котором кратковременные периоды неизменной номинальной нагрузки (рабочие периоды) чередуются с периодами отключения машины (паузами), причем, как рабочие периоды, так и паузы не настолько длительны, чтобы превышения температуры могли достигнуть установившихся значений (рисунок 4).
Рисунок 4 – Зависимость температуры нагрева от времени для повторно-кратковременного режима работы (S3)
В этом режиме продолжительность цикла на превышает 10 минут, а режим характеризуется относительной продолжительностью включения ПВ=15,25,40 и 60%, которая определяется по формуле
 , (7)
, (7)
где tр, t0, tц – время работы, паузы, цикла.
S4 – повторно-кратковременный режим с частыми пусками. В данном случае периоды пуска и кратковременной неизменной нагрузки чередуются с периодами отключения машины, причем как рабочие периоды, так и паузы не настолько длительны, чтобы превышения температуры частей машин могли достигнуть установившихся значений. Режим характеризуется: относительной продолжительностью включения (ПВ=15,25,40,60%); нормируемым числом пусков в час (30,60,120 и 240); коэффициентом инерции привода (1,2; 1,6; 2,5; 4; 6,3; 10). Коэффициент инерции это отношение суммарного приведенного к валу двигателя момента инерции привода к моменту инерции якоря (ротора).
S5 - повторно-кратковременный режим работы с частыми пусками и электрическим торможением. Периоды пуска, кратковременной неизменной нагрузки и электрического торможения чередуются с периодами отключения машины, причем превышения температуры не достигают установившихся. Нормированные ПВ и число пусков в час такие же, как и в S4.
S6 – перемежающийся номинальный режим работы. Кратковременные периоды нагрузки чередуются с периодами холостого хода во время которых двигатель не отключается, причем превышения температуры не достигают установившихся.
S7- перемежающийся номинальный режим работы с частыми реверсами.
S8 – перемежающийся номинальный режим работы с двумя или более угловыми скоростями.
3 Расчет мощностей и выбор двигателей в ЭП
Задача выбора состоит в поиске такого двигателя, который обеспечивает заданный технологический цикл рабочей машины, соответствует условиям окружающей среды и при этом имеет нормативный (допустимый) нагрев. Недопустимым является использование двигателей завышенной мощности, так как при этом увеличивается стоимость ЭП, увеличиваются потери, снижается КПД, и коэффициент мощности ЭП. Выбор ЭД обычно производится в такой последовательности: расчет мощности; предварительный выбор двигателя; проверка по условиям пуска, перегрузки, нагреву. Если условия проверки не выполняются, то выбирают другой двигатель, большей мощности.
Тип двигателя выбирается исходя из требований технологического процесса (разгон, торможение, диапазон, плавность регулирование скорости и т. д.)
Двигатель выбирается по роду тока, величине напряжения, числу оборотов (необходимо выбирать ЭД с наибольшим числом оборотов), конструктивному исполнению.
Для режима S1 при длительной постоянной нагрузке расчет мощности достаточно прост, если известна мощность потребляемая механизмом. Например, мощность двигателя для вентилятора
 , (8)
, (8)
где V – подача вентилятора; р – давление вентилятора; ηв – КПД вентилятора; ηп – КПД передачи.
При продолжительной переменной нагрузке, мощность ЭД обычно определяется методом эквивалентных величин тока, момента, мощности или потерь. Например, при методе эквивалентной мощности изменяющуюся нагрузку заменяют некоторой эквивалентной величиной, при которой двигатель выделяет тоже количество тепла, что и при переменной нагрузке. Для прямоугольных участков графика нагрузки
 . (9)
. (9)
При выборе мощности двигателя (Рном) для продолжительной переменной нагрузки необходимо выполнить условие
Рном ≥ (1,2…1,3)Рэкв . (10)
Из каталогов выбирается ближайший, больший по мощности ЭД. Иногда приходится проверять достаточность пускового момента (Мп) двигателя, учитывая, что некоторые механизмы имеют повышенное сопротивление трения в момент трогания (Мтр) с места
Мп ≥ (1,2…1,5)Мтр. (11)
При кратковременном режиме S2 работы и наличии нагрузочных диаграмм, необходимо также определить Рэкв и выбрать специальный двигатель режима S2. При этом необходимо учитывать нормированную (ПВн) и реальную продолжительность включения (ПВф)
 . (12)
. (12)
Если двигатель рассчитан на продолжительный режим работы, то при кратковременном режиме превышение температуры к концу рабочего периода не достигнет установившегося значения, т. е. в данном случае двигатель будет недоиспользован по нагреву, а соответственно и по мощности.
Для полного использования в кратковременном режиме работы двигателя, предназначенного для работы в продолжительном режиме, его следует перегружать по мощности.
Для количественной оценки перегрузки и нагрева двигателя используются коэффициенты термической и механической перегрузок
 , (13)
, (13)
![]() , (14)
, (14)
где tр - время работы двигателя;
Тн - постоянная времени нагрева, ориентировочно принимая
для асинхронных двигателей Тн =15…35 мин или может
быть рассчитана в минутах по выражению
 , (15)
, (15)
![]() - отношение постоянных потерь мощности ЭД к переменным, для асинхронных двигателей
- отношение постоянных потерь мощности ЭД к переменным, для асинхронных двигателей ![]() =0,5…0,7.
=0,5…0,7.
Мощность электродвигателя определится, как
 . (16)
. (16)
При повторно-кратковременном режиме S3, при выборе электродвигателя специального режима S3 и отличии реальной продолжительности включения от фактической, мощность определяется согласно выражения (12).
Коэффициент термической перегрузки двигателя режима S1, работающего в режиме S3
 . (17)
. (17)
Коэффициент механической перегрузки находится по формуле (14), мощность из выражения (16).
Лекция 11
УПРАВЛЕНИЕ АСИНХРОННЫМИ ДВИГАТЕЛЯМИ
Типовые схемы автоматического управления
трехфазными асинхронными двигателями
Управление электрическими двигателями включает в себя следующие операции: пуск, торможение, остановку, реверсирование, регулировку или поддержание неизменными частоты вращения, момента, мощности и других рабочих параметров электропривода.
В зависимости от способа выполнения операции управления разделяют на ручные и автоматические.
При ручном управлении операции выполняются человеком (оператором) посредством аппаратов ручного управления: рубильников, переключателей, контроллеров, пусковых и регулировочных реостатов и т. п.
При автоматическом управлении участие человека (оператора) сводится к надзору за приборами управления на случай возникновения в них аварийных ситуаций; что же касается операций управления электродвигателем, то все они выполняются без участия человека.
Электродвигатель, управляющие и информационные устройства образуют систему, называемую электроприводом. Автоматические системы управления электроприводами разделяют на разомкнутые и замкнутые.
В разомкнутой автоматической системе управления элементы электропривода составляют прямую цепь воздействий, по которой осуществляется управление электроприводом в соответствии с поступившим на вход этой цепи управляющим сигналом. Работа двигателя и других устройств электропривода происходит исключительно в соответствии с этим сигналом. Никакой информации о фактических значениях параметров в разомкнутой системе электропривода нет, а следовательно, и нет корректировки работы системы. Например, управляющим сигналом предусмотрена номинальная частота вращения вала двигателя. Однако из-за происшедшего падения напряжения в питающей сети по непредвиденным причинам частота вращения оказалась меньше номинальной. Вследствие этого фактическое положение исполнительного органа рабочего механизма не будет соответствовать заданному положению, предусмотренному управляющим сигналом. Отсутствие корректирующих мер может нарушить технологический процесс рабочей машины (механизма), управляемой данным электроприводом.
В замкнутой автоматической системе электропривода имеются цепи обратных связей, соединяющих выход системы электропривода с его входом. Информация о фактическом значении параметров по этим цепям передается на вход системы и корректирует соответствующим образом управляющий сигнал.
Рассматриваемые в данной главе разомкнутые схемы автоматического управления выполнены на релейно-контакторных элементах, применение которых в автоматическом электроприводе пока является наиболее распространенным, хотя и не всегда обеспечивает требуемую надежность.
Последнее обстоятельство зависит от качества изготовления релейно-контакторных устройств и правильного их выбора. Вместе с тем схемы с релейно-контакторными элементами отличаются простотой реализации и сравнительно невысокой стоимостью. Рассмотрим некоторые типовые схемы управления электроприводом. Все операции, связанные с включением и отключением различных элементов в рассматриваемых схемах, выполняются автоматически, т. е. без участия человека. Лишь только команды «Пуск» и «Стоп» в этих схемах выполняются человеком. Поэтому эти схемы более правильно следовало бы считать полуавтоматическими. Однако любая из этих схем, будучи включенной в систему автоматического регулирования (САР), становится автоматической, так как все команды по управлению, включая «Пуск» и «Стоп», будут выполняться в такой системе автоматически в соответствии с управляющими электрическими сигналами.
Рассматриваемые схемы выполнены с применением условных обозначений на элементы и буквенных кодов (приложение 2).
Схема управления пуском трехфазного асинхронного двигателя
с короткозамкнутым ротором посредством нереверсивного
линейного контактора
При нажатии кнопки SB1 «Пуск» (рис. 1) замыкается цепь питания катушки линейного контактора КМ1, который срабатывает и своими силовыми контактами КМ1 подключает к сети обмотку статора асинхронного двигателя М. Одновременно замыкаются контакты КМ1, шунтирующие кнопку SB1 «Пуск», чем обеспечивается питание обмотки контактора при отпускании этой кнопки. Отключение двигателя выполняется нажатием кнопки SB2 «Стоп». При этом размыкается цепь питания катушки контактора КМ1, что приводит к размыканию всех его силовых контактов КМ1, отключающих обмотку статора двигателя от сети, и контактов, шунтирующих кнопку SB1. При отпускании кнопки SB2 ее контакты замыкаются, но цепь катушки контактора КМ1 остается разомкнутой.
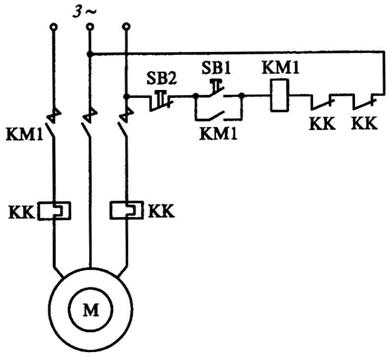
Рисунок 1 – Схема управления пуском трехфазного асинхронного двигателя с короткозамкнутым ротором
В рассмотренной схеме управления применена защита двигателя от перегрузок посредством двух тепловых реле КК. Если двигатель перегружен и потребляемый им ток превышает допустимое значение, то выделяемая нагревательным элементом в КК теплота вызывает срабатывание одного из тепловых реле, при этом контакты КК размыкают цепь питания катушки линейного контактора КМ1 и двигатель отключается от сети.
На примере рассмотренной схемы видим, что эта схема состоит из силовой цепи, через которую двигатель получает питание, и управляющей цепи, содержащей элементы, управляющие силовой цепью. Управляющие цепи отличаются небольшим значением тока, а поэтому их питание может выполняться более низким напряжением, чем напряжение силовой цепи. В некоторых схемах управляющая цепь получает питание от сети постоянного тока. Применение пониженного напряжения в управляющих цепях целесообразно еще и по соображениям электробезопасности обслуживания.
Схема пуска асинхронного двигателя с короткозамкнутым ротором
переключением обмотки статора со «звезды» на «треугольник»
Для асинхронных двигателей, работающих при соединении обмотки статора «треугольником», с целью уменьшения пускового тока применяют пуск двигателя переключением обмотки статора со «звезды» на «треугольник».
Перед пуском двигателя следует включить рубильник QS1 и автоматический выключатель QF1 (рис. 2). Затем нажатием кнопки SB1 включают контактор КМ1, который своими силовыми контактами КМ1 соединяет обмотку статора двигателя «звездой». При этом начинается разгон ротора двигателя при пониженном напряжении на фазных обмотках статора. Одновременно включается реле времени КТ, которое своими контактами КТ шунтирует кнопку SB1. С замедлением на срабатывание размыкаются контакты КТ в цепи катушки КМ1 и контактор КМ1 отключается. Одновременно замыкаются контакты КТ в цепи контактора КМ2, который срабатывает и своими контактами КМ2 соединяет обмотку статора двигателя «треугольником». Двигатель продолжает разгон, но при номинальном напряжении на фазных обмотках статора.
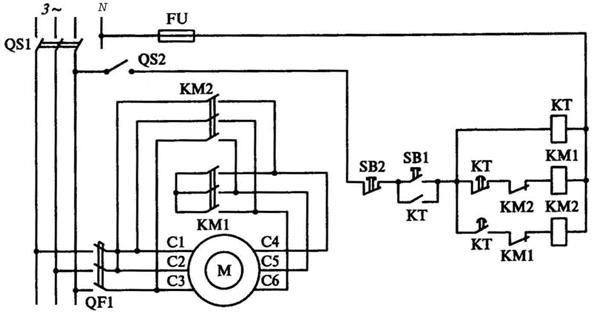
Рисунок 2 – Схема пуска трехфазного асинхронного двигателя с короткозамкнутым ротором переключением обмотки статора со «звезды» на «треугольник»
Схема нереверсивного управления трехфазным
асинхронным двигателем с короткозамкнутым ротором
с динамическим торможением
При нажатии на кнопку SB1 «Пуск» (рис. 3) замыкается цепь питания катушки линейного контактора КМ1, который срабатывает и своими силовыми контактами КМ1 подключает двигатель М к трехфазной сети, а также подключает катушку реле времени динамического торможения КТ к источнику постоянного тока. При включении контактора КМ1 размыкаются его контакты в цепи катушки контактора торможения КМ2 и замыкаются контакты КМ1, шунтирующие кнопку SB1 «Пуск». При срабатывании реле КТ замыкаются контакты КТ в цепи катушки контактора торможения КМ2, но этот контактор не срабатывает, так как цепь его катушки остается разомкнутой контактами КМ1.
Для остановки двигателя нажимают кнопку SB2 «Стоп». При этом прекращается питание катушки контактора КМ1 и двигатель отключается от сети. Одновременно замыкаются контакты КМ1 в цепи катушки контактора КМ2, который срабатывает и своими контактами КМ2 подключает обмотку статора двигателя к источнику постоянного тока, что приводит к динамическому торможению вращающегося по инерции ротора двигателя. Одновременно размыкаются контакты КМ2 в цепи катушки линейного контактора КМ1, что исключает его случайное включение.
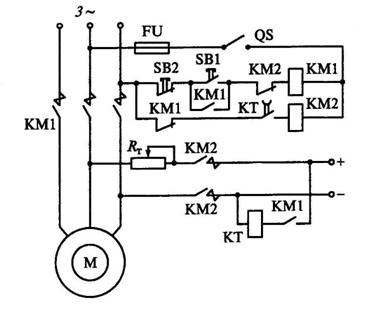
Рисунок 3 – Схема нереверсивного управления трехфазным асинхронным двигателем с короткозамкнутым ротором с применением динамического торможения
Резистор ![]() предназначен для ограничения постоянного тока в обмотке статора двигателя при динамическом торможении. Однако протекание постоянного тока в обмотке статора непродолжительно, так как при отключении контактора КМ1 размыкаются его контакты в цепи питания катушки реле времени КТ, что ведет к размыканию с некоторой временной задержкой контактов КТ в цепи питания катушки контактора торможения КМ2. В результате обмотка статора двигателя контактами КМ2 отключается от сети постоянного тока через некоторое время после отключения двигателя от трехфазной сети. Выдержка времени на размыкание контактов реле времени КТ устанавливается опытным путем с учетом времени, необходимого для торможения двигателя.
предназначен для ограничения постоянного тока в обмотке статора двигателя при динамическом торможении. Однако протекание постоянного тока в обмотке статора непродолжительно, так как при отключении контактора КМ1 размыкаются его контакты в цепи питания катушки реле времени КТ, что ведет к размыканию с некоторой временной задержкой контактов КТ в цепи питания катушки контактора торможения КМ2. В результате обмотка статора двигателя контактами КМ2 отключается от сети постоянного тока через некоторое время после отключения двигателя от трехфазной сети. Выдержка времени на размыкание контактов реле времени КТ устанавливается опытным путем с учетом времени, необходимого для торможения двигателя.
Схема реверсивного управления трехфазным асинхронным двигателем
с короткозамкнутым ротором с применением торможения
противовключением в функции скорости
Подключение двигателя к трехфазной сети возможно через две группы силовых контактов (рис. 4): контакты КМ1(П), при замыкании которых ротор двигателя вращается в одном направлении («правое» вращение), и контакты КМ2(Л), при включении которых ротор вращается в другом направлении («левое» вращение). Схема содержит реле скорости PC, механически соединенное с валом двигателя М. Контакты этого реле РС(П) и РС(Л) включены в схему управления двигателем. Работа реле скорости (рис. 4, б), основными элементами которого являются постоянный магнит 1 и короткозамкнутая клетка 2, происходит следующим образом. При вращении постоянного магнита в стержнях этой клетки индуцируются токи, которые при взаимодействии с полем постоянного магнита создают электромагнитный момент, поворачивающий клетку в направлении вращения постоянного магнита, т. е. в направлении вращения вала двигателя М. При этом клетка упором 6 воздействует на один из подвижных контактов 5 или 7. При вращении вала против часовой стрелки замыкаются левые контакты 4 и 5 [на схеме контакты РС(Л)], а при вращении по часовой клетке – правые контакты 7 и 8 [на схеме контакты РС(П)].
Для включения двигателя на «правое» вращение (по часовой стрелке) нажимают сдвоенную кнопку SB1. При этом замыкается цепь катушки линейного контактора КМ1 и одновременно размыкаются контакты в цепи катушки линейного контактора КМ2, исключающие возможность случайного включения этого контактора, что привело бы к короткому замыканию в силовой части схемы двигателя.
При срабатывании линейного контактора КМ1 замыкаются его блокировочные контакты, шунтирующие кнопку SB1, и включаются силовые контакты КМ1(П), которые присоединяют обмотку статора двигателя к сети. Одновременно размыкаются контакты блокировочные КМ1, исключающие возможность включения контактора КМ2, и замыкаются контакты КМ1 в цепи реле торможения КМт. После пуска двигателя М срабатывает реле скорости PC и его средний контакт PC замыкается с крайним контактом РС(П) (на рис. 4, б замыкаются контакты 7 и 8).
|

![]()

Рисунок 4 – Схема управления трехфазным асинхронным двигателем с короткозамкнутым ротором с применением торможения противовключением в функции скорости (а) и устройство реле скорости (б)
Для остановки двигателя нажимают кнопку SB3 «Стоп». При этом замыкаются контакты, подключающие катушку реле торможения КМт, при срабатывании которого размыкаются его контакты КМт в цепи катушки контактора КМ1 и двигатель отключается от сети, продолжая вращение по инерции. Одновременно замыкаются контакты КМт в цепи реле торможения КМт и контакты КМт в цепи подвижного контакта реле скорости PC. Так как отключение контактора КМ1 вызвало замыкание контактов КМ1 в цепи катушки контактора КМ2, он включается (при этом ток проходит через контакты РС(П) реле скорости PC) и замыкает силовые контакты КМ2(Л). Возникший в двигателе вращающий момент «левого» вращения вызывает торможение двигателя противовключением. При уменьшении частоты вращения ротора двигателя до значения, составляющего 5 – 10 % от номинального, вращающий момент на короткозамкнутой клетке реле скорости PC уменьшается настолько, что под действием пружины контакты 7 и 8 РС(П) размыкаются, катушка контактора КМ2 отключается и процесс торможения прекращается. Это исключает возможность реверсирования двигателя при торможении противовключением. Настройку частоты вращения ротора двигателя, при которой размыкаются контакты реле скорости PC, выполняют регулировкой сжатия пружин реле посредством винтов З и 9 (см. рис. 4, б).
Если при работе двигателя М с «правым» вращением ротора потребуется его реверсирование, то нажимать кнопку SB3 «Стоп» не следует. Для этого достаточно нажать сдвоенную кнопку SB2. При этом размыкаются контакты в цепи катушки контактора КМ1 и замыкаются контакты в цепи контактора КМ2. В итоге разомкнутся силовые контакты КМ1(П) и замкнутся силовые контакты КМ2(Л), изменится порядок следования фаз на обмотке статора и произойдет реверсирование двигателя. Если после этого потребуется остановка двигателя, то необходимо нажать кнопку SB3 «Стоп», что вызовет процесс торможения противовключением.
Схема нереверсивного управления двухскоростным
асинхронным двигателем с короткозамкнутым
ротором и двумя обмотками на статоре с разным числом полюсов
После включения автоматов QF1 и QF2 нажимают сдвоенную кнопку SB1 (рис. 5). При этом срабатывает контактор КМ1, который своими контактами размыкает цепь катушки контактора КМ2, чтобы исключить возможность случайного включения этого контактора, что привело бы к аварии, и включает в трехфазную сеть обмотку статора с меньшим числом полюсов (2р=2). Одновременно шунтируется кнопка SB1. Двигатель работает с наибольшей частотой вращения.
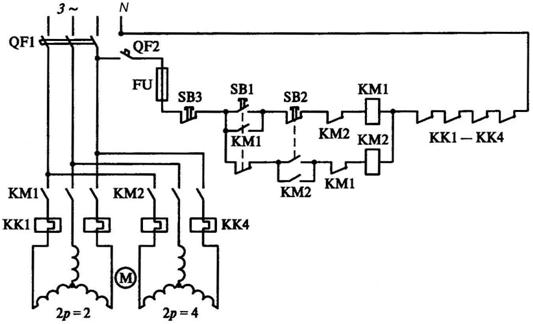
Рисунок 5 – Схема нереверсивного управления двухскоростным асинхронным двигателем
При необходимости перевода двигателя на меньшую частоту вращения нажимают сдвоенную кнопку SB2. При этом отключается контактор КМ1 и включается контактор КМ2. В результате размыкаются линейные контакты КМ1 и замыкаются линейные контакты КМ2, включающие в сеть обмотку статора с большим числом полюсов (2р=4). Для отключения двигателя следует нажать кнопку SB3. При этом размыкается цепь управления и все устройства в этой цепи отключаются. В итоге размыкаются линейные контакты КМ2 и двигатель оказывается выключенным.
Для защиты асинхронного двигателя от перегрузки в линейные провода цепей статоров включены тепловые реле КК1 – КК4, а их размыкающие контакты включены последовательно в цепь управления. При перегрузке по току хотя бы в одном линейном проводе сработает тепловое реле, включенное в цепь этого провода, и цепь управления окажется разомкнутой.
Схема нереверсивного управления трехфазным
асинхронным двигателем с фазным ротором
Схема обеспечивает реостатный пуск двигателя в функции времени с применением реле времени постоянного тока КТ1, КТ2 и КТЗ с замедлением при отпускании (рис. 6).
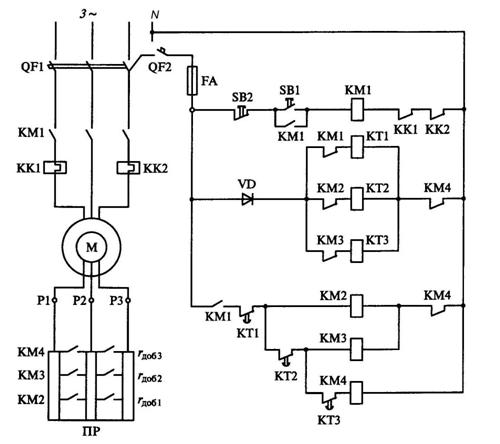
Рисунок 6 – Схема нереверсивного управления трехфазным асинхронным двигателем с фазным ротором
При включении автоматических выключателей QF1 и QF2 срабатывают все реле времени КТ1, КТ2 и КТЗ и их контакты размыкают цепи катушек контакторов КМ2, КМЗ и КМ4, предназначенных для замыкания секций пускового реостата ПР. Пуск двигателя начинается с нажатия кнопки SB1 «Пуск», которая замыкает цепь катушки линейного контактора КМ1. При его срабатывании замыкаются линейные контакты КМ1, включающие обмотку статора двигателя в трехфазную сеть. Одновременно контакты КМ1 шунтируют кнопку SB1 так, чтобы при отпускании кнопки цепь катушки КМ1 осталась замкнутой. Все контакты в ПР остаются разомкнутыми, т. е. пуск двигателя начинается при полностью введенных ступенях ПР (![]() ). Одновременно контакты линейного контактора КМ1 подключают катушки контакторов КМ2, КМЗ и КМ4, а контакты КМ1 в цепи реле времени КТ1 размыкаются и отключают это реле. Через установленную в этом реле выдержку времени при отпускании контакты КТ1 замкнутся, контактор КМ2 сработает и своими контактами зашунтирует первую ступень ПР так, что пуск двигателя будет продолжаться на второй ступени ПР (
). Одновременно контакты линейного контактора КМ1 подключают катушки контакторов КМ2, КМЗ и КМ4, а контакты КМ1 в цепи реле времени КТ1 размыкаются и отключают это реле. Через установленную в этом реле выдержку времени при отпускании контакты КТ1 замкнутся, контактор КМ2 сработает и своими контактами зашунтирует первую ступень ПР так, что пуск двигателя будет продолжаться на второй ступени ПР (![]() ). Одновременно при срабатывании КМ2 его контакты отключат реле времени КТ2 и контакты этого реле в цепи контактора КМЗ с установленной выдержкой времени включат этот контактор. Контактами КМЗ будет зашунтирована вторая ступень ПР, и пуск двигателя будет продолжаться на третьей ступени ПР (
). Одновременно при срабатывании КМ2 его контакты отключат реле времени КТ2 и контакты этого реле в цепи контактора КМЗ с установленной выдержкой времени включат этот контактор. Контактами КМЗ будет зашунтирована вторая ступень ПР, и пуск двигателя будет продолжаться на третьей ступени ПР (![]() ). Одновременно контакты КМЗ в цепи реле времени КТЗ разомкнут эту цепь и реле будет отключено. Его контакты КТЗ, спустя время выдержки при отпускании, замкнут цепь катушки контактора КМ4, который сработает и своими контактами зашунтирует последнюю ступень ПР. На этом процесс пуска двигателя заканчивается и наступает режим работы при
). Одновременно контакты КМЗ в цепи реле времени КТЗ разомкнут эту цепь и реле будет отключено. Его контакты КТЗ, спустя время выдержки при отпускании, замкнут цепь катушки контактора КМ4, который сработает и своими контактами зашунтирует последнюю ступень ПР. На этом процесс пуска двигателя заканчивается и наступает режим работы при ![]() . Так как работа двигателя может продолжаться длительное время, все реле времени КТ1, КТ2, КТЗ и контакторы КМ2 и КМЗ отключаются посредством размыкающих контактов КМ4. Контакты КМ4 полностью шунтируют ПР.
. Так как работа двигателя может продолжаться длительное время, все реле времени КТ1, КТ2, КТЗ и контакторы КМ2 и КМЗ отключаются посредством размыкающих контактов КМ4. Контакты КМ4 полностью шунтируют ПР.
Остановка двигателя осуществляется нажатием кнопки SB2. При этом размыкается цепь катушки линейного контактора КМ1, контакты которого отключают от сети обмотку статора и катушки контакторов КМ2 – КМ4. Что же касается реле времени КТ1 – КТЗ, то, благодаря замкнутому состоянию контактов в цепи катушек этих реле, они окажутся включенными, что подготовит схему управления к следующему пуску двигателя.
Для защиты двигателя от перегрузки в два линейных провода включены тепловые реле КК1 и КК2, размыкающие контакты которых включены последовательно в цепь катушки линейного контактора КМ1.
ЛЕКЦИЯ 12
Тема: Электропривод грузоподъемных машин и механизмов
Цель лекции: изучить особенности работы и методику расчёта электропривода крановых механизмов.
Вопросы.
1. Общие требования к электрооборудованию крановых механизмов
2. Механические характеристики электропривода крановых механизмов
3. Методика расчета электропривода
1. Общие требования к электрооборудованию крановых механизмов
Электрооборудование кранов должно обеспечивать надежную высокопроизводительную и безопасную работу. Электропривод кранов работает в повторно-кратковременном режиме с большой частотой включений в запыленных и влажных помещениях, на открытом воздухе и в условиях резких изменений температур. Напряжение питания кранов не должно превышать 500 В.
Поэтому электрооборудование здесь рассчитано на напряжение 220, 380, 500 В переменного и 220, 440 В постоянного тока. На вновь строящихся предприятиях напряжение 500 В не применяется, а напряжение 440 В используется главным образом в силовых кранов большей грузоподъемности.
Механизмы подъема и передвижения снабжены конечными выключателями, которые будучи введены в цепь управления, ограничивают ход захватывающего устройства вверх и передвижение моста и тележки в обе стороны. Электрические цепи и двигатели защищены от коротких замыканий и перегрузок достигающих больше 200 % максимальными токовыми реле. Тепловая защита двигателей крановых установок не предусматривается, поскольку двигатели работают в повторно-кратковременных режимах со значительными перегрузками, при которых возможно ложное срабатывание тепловых реле. Электрическая схема крана должна иметь нулевую защиту.
Все крановые механизмы должны быть снабжены тормозами, а подъемные механизмы - автоматическими тормозами закрытого типа, действующими при отключении питания. Все нетоковедущие металлические части электрооборудования должны быть соединены с металлической фермой крана, а та, в свою очередь, - с заземляющим контуром цеха через подкрановые рельсы.
1.2. Требования, предъявляемые к электроприводу крановых механизмов
Для выбора системы электропривода необходимо четко представлять себе технологические требования к приводу того механизма, для которого он выбирается.
Для качественного выполнения подъема, спуска и перемещения грузов электропривод крановых механизмов должен удовлетворять следующим основным требованиям:
1. Регулирование угловой скорости двигателя в сравнительно широких пределах в связи с тем, что тяжелые грузы целесообразно перемещать с меньшей скоростью, а пустой крюк или ненагруженную тележку - с большой скоростью для увеличения производительности крана. Пониженные скорости необходимы также для осуществления точной остановки транспортируемых грузов с целью ограничения ударов при их посадке и облегчают работу оператора, так как не требуют многократного повторения пусков для снижения средней скорости привода перед остановкой механизма.
2. Обеспечение необходимой жесткости механических характеристик привода, особенно регулировочных, с тем чтобы низкие скорости почти не зависели от груза.
3. Ограничение ускорений до допустимых пределов при минимальной длительности переходных процессов. Первое условие связано с ослаблением ударов в механических передачах при выборе зазора, с предотвращением пробуксовки ходовых колес тележек и мостов, с уменьшением раскачивания подвешенного на канатах груза при интенсивном разгоне и резком торможении механизмов передвижения; второе условие необходимо для обеспечения высокой производительности крана.
4. Реверсирование электропривода и обеспечение его работы как в двигательном, так и в тормозном режиме.
1.2. Выбор рода тока и типа электропривода
Выбор рода тока для электрооборудования крана имеет важное значение, поскольку с ним связаны такие показатели, как технические возможности привода, капиталовложения и стоимость эксплуатационных расходов, масса и размеры оборудования, его надежность и простота обслуживания.
Для привода крановых механизмов возможно применение различных двигателей и систем электропривода. Их выбор определяется грузоподъемностью, номинальной скоростью движения, требуемым диапазоном регулирования скорости привода жесткостью механических характеристик, числом включения в час. В настоящее время на кранах чаще всего применяют простые системы электропривода, в которых двигатели получают питание от сети переменного или постоянного тока.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
