

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Привод с асинхронными двигателями с коротким замыканием ротором применяется для механизмов кранов небольшой мощности до 15 кВт работающих в легком режиме. Для регулировки скорости используют двух или трехскоростные двигатели. Однако этот привод не обеспечивает необходимую жесткость регулировочных характеристик и устойчивую работу при пониженных скоростях.
Если необходимо в широком диапазоне регулировать скорость, а также необходимо обеспечить низкие устойчивые угловые скорости в различных регионах, то применяют двигатели постоянного тока последовательного возбуждения, которые допускают большие перегрузки по моменту и имеют мягкую естественную характеристику, что позволяет опускать и поднимать грузы с повышенной скоростью.
Двигатели параллельного возбуждения применяют в тех случаях, когда необходимо иметь достаточно жесткие механические характеристики при низких угловых скоростях, а также обеспечить работу двигателя на естественной характеристике в генераторном режиме.
Если требуется обеспечить повышенный диапазон регулирования скорости привода, ограничение стопорного момента и плавное протекание переходных процессов двигателя при напряженном режиме работы кранового механизма, то применяют регулируемый электропривод по системе Г-Д. Использование такой системы при больших мощностях двигателей позволяет облегчить аппаратуру управления и повысить полезность работы привода.
1.3. Режимы работы
Режимы работы механического и электрического оборудования кранов стандартизованы (Л - легкий, С - средний, Т - тяжелый, ВТ - весьма тяжелый) и характеризуются коэффициентами: ![]() - использования механизма по грузоподъемности,
- использования механизма по грузоподъемности, ![]() и
и ![]() - годового и суточного использования механизмов, ПВ % - продолжительностью включения двигателя механизма:
- годового и суточного использования механизмов, ПВ % - продолжительностью включения двигателя механизма:
 ;
;  ;
;  ;
;
 ,
,
где ![]() - средний вес поднимаемого за смену груза;
- средний вес поднимаемого за смену груза;
![]() - номинальная грузоподъемность;
- номинальная грузоподъемность;
![]() - число дней работы механизма в году;
- число дней работы механизма в году;
![]() - число часов работы механизма в сутки;
- число часов работы механизма в сутки;
![]() - время работы двигателя;
- время работы двигателя;
![]() - время паузы.
- время паузы.
Для электрооборудования кранов ПВ % подсчитывают, исходя из того, что время цикла не более 10 мин., а для механизмов не более 1 часа.
Наиболее точно режим работы крана может быть оценен по коэффициентам использования и продолжительности включения, подсчитанным для конкретных условий.
2. Механические характеристики электропривода крановых механизмов
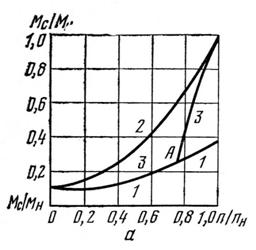
Механические характеристики электроприводов крановых механизмов (рис.1) должны соответствовать требованиям, предъявляемым со стороны технологических операций, выполняемых краном.
Рисунок 1 – Механические характеристики электроприводов кранов:
1 - подъем с высокой скоростью, 2 - опускание с высокой скоростью, 3- для плавного пуска двигателя при реостатном управлении, 4 - для получения промежуточных скоростей при работе на жесткой характеристике, 5 - для спуска с малой скоростью в тормозном режиме II, 5 - для спуска груза крана в двигательном режиме, 6 - для привода механизмов работающих с резкой перегрузкой, 7 - для поддержания определенного ускорения при разгоне.
Высокая точность монтажных операций обусловливает применение электроприводов с большей жесткостью характеристик при значительном диапазоне регулирования. Электроприводы с жесткими характеристиками используются для подъема 1 и опускания 2 грузов с высокой скоростью, с мягкими характеристиками 3 - для плавного пуска двигателя при реостатном управлении и для получения промежуточных скоростей грузов с жесткими характеристиками 4 - для определенного уровня при их подъеме (квадрант 1), а с характеристикой 5 - для спуска с малой скоростью в тормозном режиме (квадрант II), а также для спуска груза крюка и легких грузов в двигательном режиме (квадрант III), с экскаваторной характеристикой 6 - для привода механизмов, работающих с резкой перегрузкой.
В ряде случаев для механизмов передвижения основным требованием к механическим характеристикам электропривода является поддержание постоянства ускорения при разгоне, что обеспечивается приводом с характеристиками вида 7.
Рассмотренные графики помогают выбрать тип привода для обеспечения заданного набора характеристик. Набор 1, 2, 3 обеспечивается асинхронным двигателем с контактными кольцами при реостатном регулировании со стороны ротора, а набор 1, 2, 3, 5 - более сложным приводом, например асинхронным двигателем с контактными кольцами и дросселями насыщения в цепи статора или электроприводом постоянного тока.
Для полной оценки электродвигателя, кроме механических характеристик, необходимо знать минимальную скорость при номинальной нагрузке и жесткость характеристик или диапазоне регулирования, а также необходимый перегрузочный момент при минимальной скорости передвижения. Для снижения ударных нагрузок при выборе каната или троса применяются электроприводы с характеристиками вида 3 и 7.
При мягких характеристиках по мере натяжения троса момент двигателя расчет, а скорость его падает. Поэтому в начале движения груза динамические нагрузки на механическое оборудование значительно снижаются.
3. Методика расчета электропривода
Выбор электропривода крановых механизмов предполагает значение необходимой грузоподъемности и скорости движения, конструктивных данных и массы механического оборудования, диапазона регулирования скорости и необходимой жесткости механических характеристик при работе, числа включений в час, продолжительности включения, использования по грузоподъемности и времени, а также по условиям окружающей среды, в которой находится электрооборудование.
Момент и мощность на валу двигателя подъемной лебедки в статистическом режиме работы при подъеме груза определяют по следующим формулам
 , (1)
, (1)
 , (2)
, (2)
где ![]() - масса груза, кг;
- масса груза, кг;
![]() - масса захватывающего приспособления, кг;
- масса захватывающего приспособления, кг;
 - передаточное отношение редуктора;
- передаточное отношение редуктора;
![]() - КПД подъемного механизма;
- КПД подъемного механизма;
![]() - скорость подъема груза, М/с;
- скорость подъема груза, М/с;
![]() - диаметр подъемного механизма;
- диаметр подъемного механизма;
В статистическом режиме спуска мощность двигателя равна разности мощностей трения ![]() и
и ![]() , развиваемой силой тяжести груза
, развиваемой силой тяжести груза
![]() , (3)
, (3)
При  двигатель работает в тормозном режиме и
двигатель работает в тормозном режиме и
 .
.
Для горизонтального перемещения в статистическом режиме работы
![]() , (4)
, (4)
![]() , (5)
, (5)
где ![]() - коэффициент, учитывающий трение реборд колес о рельсы;
- коэффициент, учитывающий трение реборд колес о рельсы;
![]() - масса передвигающегося механизма;
- масса передвигающегося механизма;
![]() - коэффициент трения скольжения;
- коэффициент трения скольжения;
![]() - радиус шейки оси колеса, м;
- радиус шейки оси колеса, м;
![]() - коэффициент трения качения, м;
- коэффициент трения качения, м;
- передаточное отношение редуктора механизма передвижения;
![]() - КПД механизма передвижения;
- КПД механизма передвижения;
![]() - скорость движения, м/с;
- скорость движения, м/с;
![]() - радиус колеса, м.
- радиус колеса, м.
После выбора двигателя по статической нагрузке и выбора электрической схемы управления электропривод проверяют по допустимым значениям ускорений.
Фактическое ускорение груза определяют из управления привода.
![]() , (6)
, (6)
откуда
![]() , (7)
, (7)
где ![]() - максимальное усилие двигателя, развиваемое при спуске, Н;
- максимальное усилие двигателя, развиваемое при спуске, Н;
![]() - сила тягового сопротивления, Н;
- сила тягового сопротивления, Н;
![]() - ускоряемая масса.
- ускоряемая масса.
Если подъемно-транспортный механизм передвигается по наклонному пути и испытывает действие ветровой нагрузки, мощность

где ![]() - угол наклона путей к горизонту;
- угол наклона путей к горизонту;
![]() - удельная ветровая нагрузка Н/м ;
- удельная ветровая нагрузка Н/м ;
![]() - площадь, подверженная действию ветра под углом 90°, м.
- площадь, подверженная действию ветра под углом 90°, м.
Первое слагаемое учитывает мощность, необходимую для горизонтального передвижения, второе соответствует мощности подъема, третье - мощности от ветровой нагрузки.
Мощность электродвигателя для подъемного механизма выбирают по каталогу с учетом эквивалентной мощности ![]() , определяемой по нагрузочной диаграмме (рис. 2), режима работы по продолжительности включения ПВ% и требуемой перегрузочной способности
, определяемой по нагрузочной диаграмме (рис. 2), режима работы по продолжительности включения ПВ% и требуемой перегрузочной способности ![]() двигателя.
двигателя.
Рисунок 2 - Нагрузочная диаграмма подъемного механизма
Эквивалентная мощность
 , (8)
, (8)
где ![]() - максимальная мощность при пуске двигателя;
- максимальная мощность при пуске двигателя;
![]() - мощность подъема;
- мощность подъема;
![]() и
и ![]() - продолжительность пуска и работы.
- продолжительность пуска и работы.
Продолжительность включения
![]() , (9)
, (9)
где ![]() - продолжительность паузы.
- продолжительность паузы.
Обычно действительная продолжительность включения не совпадает со стандартной, тогда эквивалентную мощность приводят к стандартной продолжительности включения по формуле
Исходя из условия  , по каталогу выбирают мощность двигателя и проверяют его перегрузочную способность
, по каталогу выбирают мощность двигателя и проверяют его перегрузочную способность
где ![]() - напряжение на двигателе при пуске в относительных единицах;
- напряжение на двигателе при пуске в относительных единицах;
![]() - кратность максимального момента двигателя;
- кратность максимального момента двигателя;
![]() - максимальный момент сопротивления по нагрузочной диаграмме;
- максимальный момент сопротивления по нагрузочной диаграмме;
![]() - номинальный момент двигателя.
- номинальный момент двигателя.
4. Электропривод талей и кран-балок
Электрифицированные тали и кран-балка применяют для подъема и перемещения грузов и деталей машин при монтажных и ремонтных работах внутри производственных помещений.
Электродвигатель ТЭП-1 (грузоподъемность 1 т, напряжение 380 В) состоит из механизмов подъема и передвижения с индивидуальными электроприводами.
Для привода механизма подъема груза со скоростью 6,5...6,9 м/с применяется асинхронный двигатель с повышенным скольжением типа АОС-32-4М (мощность 1,4 кВт при 132 об/мин и ПВ=25 %).
Рабочие характеристики выглядят следующим образом (рис.3)
Рисунок 3 - Рабочие характеристики тали:
1 – характеристика ![]() ; 2 – характеристика Р подъема груза; 3 – характеристика
; 2 – характеристика Р подъема груза; 3 – характеристика ![]() ; 4 – характеристика Р опускания груза.
; 4 – характеристика Р опускания груза.
КПД 3 электротами возрастает до 0,58 с увеличением массы поднимаемого груза до 1000 кг. Интересен режим работы двигателя 4 при опускании груза: пока масса груза менее 425 кг, электродвигатель работает в двигательном режиме, а когда масса свыше 425 кг – в генераторном. Следовательно, для преодоления момента холостого хода механизму подъема достаточен груз массой 425 кг.
Для привода ходовой тележки электротами применен асинхронный электродвигатель типа ТЭМ-0,25 (мощность 0,25 кВт при 1410 об/мин и ПВ = 25 %) со встроенным планетарным одноступенчатым редуктором и шестеренчатой передаче, передающей вращение на катки. На механизмах передвижения простейших талей тормозные устройства не устанавливают. Передвижение тали по балке в обе стороны ограничивают механические упоры.
Кран-балка отличается от тали тем, что балка, по которой передвигается таль, может перемещаться вдоль производственного помещения, приводимая в движение электродвигателем с короткозамкнутым или фазным ротором.
Электродвигатели талей и кран-балок управляют при помощи реверсивных магнитных пускателей и пусковых кнопок, подвешиваемых на гибком бронированном кабеле.
Для надежного разгона привода кранового механизма должно быть выполнено следующее условие

где ![]() - кратность среднего пускового момента двигателя, определяемая по каталожным данным;
- кратность среднего пускового момента двигателя, определяемая по каталожным данным;
![]() и
и ![]() - максимальная и минимальная кратность момента двигателя при пуске, причем необходимо чтобы
- максимальная и минимальная кратность момента двигателя при пуске, причем необходимо чтобы ![]() .
.
Максимально допустимое время пуска для механизмов подъема составляет 3...5 с, для механизмов передвижения - 10...15 с.
Механизм подъема крановых механизмов
1. Суммарное усилие под нагрузкой при пуске
 .
.
2. Усилие подъема
 ,
,
где ![]() - масса груза;
- масса груза;
![]() - масса захватывающего устройства.
- масса захватывающего устройства.
3. Динамическое усилие при подъеме
 ,
,
где ![]() - скорость подъема груза.
- скорость подъема груза.
4. Мощность электродвигателя при запуске
 .
.
5. Мощность электродвигателя в установившемся режиме
 .
.
6. Суммарное усилие при пуске
 ,
,
где ![]() - усилие подъема на х. х. установившемся режиме;
- усилие подъема на х. х. установившемся режиме;
![]() - значение динамического усилия на х. х.
- значение динамического усилия на х. х.
 ;
;  .
.
7. Мощность на х. х. механического подъема при пуске
 .
.
8. Мощность при установившемся режиме работы
 .
.
9. Время пуска
 .
.
10. Время подъема и опускания груза
 .
.
11. Время паузы
 .
.
12.  .
.
12.  ,
, ![]() .
.
Лекция 13
Электропривод насосных установок.
Цель: Изучить оборудование для водоснабжения АПК и методику расчёта электропривода водоснабжающих установок.
1. Оборудование для водоснабжения с. х. предприятий.
2. Методика расчёта мощности электропривода насосной установки.
3. Определение времени работы электропривода насосного агрегата.
4. Регулирование подачи электронасосных установок.
1. Оборудование для водоснабжения с. х. предприятий.
1.1 Общие вопросы водоснабжения
Вода на животноводческих фермах расходуется на поение животных, приготовление кормов, тушение пожаров, содержание в чистоте оборудования и помещений и другие технологические нужды.
Автоматизация водоснабжения позволяет:
- увеличивать продуктивность животных;
- снизить стоимость воды в 25-30 раз.
Основными способами повышения качества воды являются:
- осветление (отстаивание, фильтрование);
- опреснение;
- обеззараживание (кипячение, хлорирование, ультрафиолетовое облучение).
Для обеспечения водой сельскохозяйственных потребителей используются насосные станции
1.2 Насосные станции
Насосные станции в системах сельскохозяйственного водоснабжения играют важную роль. Электрическую энергию применяют для привода электродвигателей насосов, питания оборудования и средств автоматизации. Наиболее энергонасыщенный элемент системы – насосная станция, в которую входят водоподъёмное оборудование и средства автоматизации.
Водопроводные насосные станции по надёжности разделяют на три категории, отвечающие следующим условиям:
- не допускаются перерывы в подаче воды – противопожарные и объединенные водопроводы;
- допускаются кратковременные перерывы на время, для включения резервного электроснабжения, если есть ёмкости с противопожарным запасом воды;
- допускаются перерывы на время ликвидации аварии, но не более чем на сутки.
Насосные станции на водозаборных скважинах могут быть подземного и комбинированного типов. В комплект станции входят технологическое оборудование и приборы для учёта расхода воды.
1.3 Насосы
Для обеспечения водоснабжения сельскохозяйственных потребителей применяют насосы:
- погружные типа ЭЦВ для трубчатых колодцев Ø 100…250мм с подачей от 1,6 до 120 м3/ч при напорах до 235м;
- центробежные и вихревые общего назначения и плавающего типа – К и КМ; НД и Д; ИМС.
- объёмные и объмно-инерционные, НЭБ, «Струмок», «Риони».
Работа насоса характеризуется подачей – количеством жидкости, подаваемой в единицу времени и напором насоса.
1.4 Системы водоснабжения
Система водоснабжения объединяет комплекс сооружений и устройств на территории хозяйства, обеспечивающих все потребители доброкачественной водой в необходимых количествах.
Системы водоснабжения делятся на:
- централизованные;
- смешанные.
Водонапорную башню рекомендуется ставить на самом высоком месте. Если территория равная, то башню следует размещать в центре фермы.
В безбашенных водопроводах (ВЭ – 2,5м; ВУ – 5/30) напорно-регулирующим устройством служит герметически закрытый воздушно-водяной бак, снабженный реле давления, которое автоматически включает или выключает насосную станцию в зависимости от количества воды в баке. Безбашенные установки применяются тогда, когда расход воды не превышает 30м3/ч
1.5 Выбор диаметра труб
Выбор диаметра труб производится таким образом, чтобы скорость движения воды в них находилась в пределах V=0,5…1,25м/с (при V<0.5м/с трубы засоряются, при V>1,25м/с – быстро изнашиваются).
Для расчёта водопроводной сети схему водоподвода разбивают на отдельные участки определённой длины. Для каждого участка находят расчетное количество воды (л/с), проходящей в единицу времени
![]() (1)
(1)
где qi – норма расхода воды одним потребителем, л/сут;
mi – количество потребителей;
Ксут и Кчас – коэффициент сточной часовой неравномерности водопотребления.
Требуемый диаметр трубы
 (2)
(2)
где V – скорость движения воды.
2. Методика расчёта мощности электропривода насосной установки.
Выбор насосной станции осуществляется по требуемому напору и подаче.
Напор определяют по формуле:
 (3)
(3)
где Hвс – напор определяемый высотой всасывания;
H2 – геометрический напор – расстояние по вертикали от нижнего до верхнего уровня, м
hл – сумма потерь напора по длине напорного и всасывающего трубопровода;
hм – сумма потерь напора на преодоление местных сопротивлений в трубопроводе.
Подача насоса принимается равной требуемому расходу потребителей
 (4)
(4)
где Ксут=1,3 ÷ 1,5
Ксут=2,0 ÷ 2,5
η – КПД установки, η=0,9.
Мощность для привода насоса
![]() (5)
(5)
где Qн – подача насоса;
Н – напор ;
ηн – КПД насоса;
ηп – КПД подачи;
 Кз – коэффициент запаса мощности.
Кз – коэффициент запаса мощности.
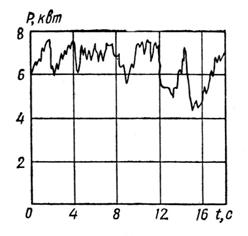
Рисунок 1 - Механическая и нагрузочная характеристика насоса.
Величины Q, H и Р зависят от частоты вращения n и рабочего колеса

3. Определение времени работы электропривода насосного агрегата.
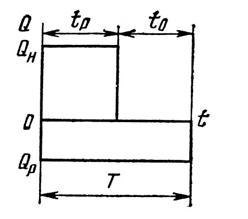
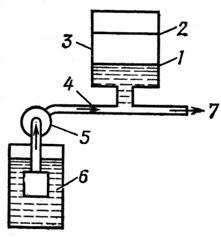
Технологический процесс описывается графиком
 |  |
а) б)
Рисунок 2
а – график работы электронасосного агрегата; б – гидравлическая схема насосной станции с водонапорным баком: 1 – нижний уровень воды в баке; 2 – верхний уровень воды в баке; 3 – водонапорный бак; 4, 7 – водопровод; 5 – насос; 6 - источник воды.
Продолжительность работы агрегата:

где Vр – регулируемый объём бака;
Qн – подача насоса;
Qр – расход воды.
Время паузы

Частота включений электродвигателя в час

где Т – период работы, Т=tр+t п
С учётом Qн и Qр частота включений
Максимальное количество включений электропривода насоса

Регулируемый объём бака

При  , насосная станция работает с максимальной частотой включения. Для нормальной работы электропривода необходимо определённое соотношение регулируемого объёма бака и производительности насоса.
, насосная станция работает с максимальной частотой включения. Для нормальной работы электропривода необходимо определённое соотношение регулируемого объёма бака и производительности насоса.
Обычно принимают Zmax=6 для насосных агрегатов устаревших модификаций. Для современного оборудования Zmax=30, что приводит к значительному снижению объёма Vp.
4. Регулирование подачи электронасосных установок.
Подачу электронасосных установок регулируют включением и отключением одного или нескольких электрических двигателей, дросселированием задвижкой, изменением частоты вращения.
Наиболее перспективным, считается последний метод, поскольку он даёт возможность автоматизировать технологический процесс.
Частоту вращения асинхронного двигателя можно регулировать изменением подводимого к двигателю напряжения, переключением числа пар полюсов, изменением сопротивления в роторной цепи, частоты тока питающей сети.
Частота вращения асинхронного двигателя:
где f1 – частота питающего тока;
p – число пар полюсов;
S – скольжение.
4.1 Реостатное регулирование асинхронных двигателей с фазным ротором.
 В асинхронных двигателях с фазным ротором частоту вращения регулируют введением в цепь ротора добавочного резистора сопротивлением rдоб в виде регулировочного реостата.
В асинхронных двигателях с фазным ротором частоту вращения регулируют введением в цепь ротора добавочного резистора сопротивлением rдоб в виде регулировочного реостата.
а) б)
Рисунок 3
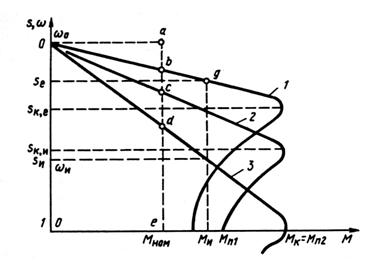
а – Механические характеристики АД с фазным ротором; б - Реостатное регулирование АД с фазным ротором.
При полностью выведенном реостате (rдоб=0) двигатель работает в режиме естественной механической характеристики n=f(M). При увеличении сопротивления реостата возрастает критическое скольжение Sкр, при этом максимальный момент Mmax, а следовательно, и перегрузочная способность двигателя остаются неизменными и двигатель переходит в режим искусственной механической характеристики (rдоб>0), а его частота вращения при заданной нагрузке Mном уменьшается до значения nном2. Дальнейшее увеличение сопротивления регулировочного реостата до значения rдоб3> rдоб2 приводит к тому, что двигатель переходит в режим другой, более мягкой искусственной механической характеристики и частота вращения ротора уменьшается до значения nном3.
Зависимость скольжения от активного сопротивления цепи ротора определяется выражением:
![]()
где m1 – количество фаз статора;
I2 – ток ротора;
М – электромагнитный момент.
Изменение частоты вращения возможно только в сторону уменьшения от синхронной. Одновременно со снижением частоты вращения меняется и жёсткость механических характеристик – они становятся более мягкими.
Следует помнить, что с ростом добавочного сопротивления растут потери в цепи ротора, при этом КПД и полезная мощность электродвигателя уменьшается.
ЛЕКЦИЯ № 14
Электропривод вентиляционных установок
ВОПРОСЫ
1. Общие сведения и требования, предъявляемые к микроклимату в сельскохозяйственном производстве.
2. Технические средства для обеспечения микроклимата в животноводческих и птицеводческих помещениях.
3. Воздухообмен животноводческого помещения.
4. Регулирование производительности вентиляционных установок.
1. Общие сведения и требования, предъявляемые к микроклимату в сельскохозяйственном производстве.
Применение интенсивных способов содержания животных и птицы в помещениях промышленного типа предъявляет повышенные, качественно новые, требования к параметрам микроклимата. Особое значение имеет обеспечение оптимальных параметров среды в помещениях для молодняка. Высокая концентрация поголовья резко увеличивает в воздушной среде помещений продуктов обмена веществ животных и птицы (вредных газов, водяных паров и т. д.), а также пылевую и бактериальную загрязненность воздуха, что отрицательно влияет на физиологическое состояние организма. Вследствие дыхания животных и испарения ими влаги, разложения экскрементов воздух в помещениях обедняется кислородом, насыщается вредными газами, в нем накапливаются вредные пары, повышается его температура. Неблагоприятно отражается на микроклимате увеличение количества тяжелых положительно и отрицательно заряженных аэроионов в воздухе, проникновение пыли, действие микробов, недостаток света, отсутствие ультрафиолетовых лучей в помещении. Все это опасно для здоровья, как обслуживающего персонала, так и животных.
Если в помещениях неудовлетворительный микроклимат, то при прочих равных условиях молочная продуктивность коров снижается на 10 – 15%, среднесуточный прирост живой массы молодняка – на 15 – 30%, яйценоскость кур – на 25 – 35%, повышается расход кормов на единицу выходящей продукции, быстро развиваются болезнетворные микробы и распространяется инфекция.
Микроклимат животноводческих и птицеводческих помещений определяется следующими основными показателями: температура помещения; влажность воздуха; скорость и направление движения воздушных потоков в местах расположения животных; газовый состав воздуха; содержание пыли и микроорганизмов в воздухе; интенсивность естественного и искусственного освещения и оптического излучения; уровень производственного шума; степень ионизации воздуха.
Все технические средства для создания микроклимата делятся на 3 большие группы: устройства обеспечивающие воздухообмен и освещение, обеспечивающие обработку воздуха, средства создания местного микроклимата.
2. Технические средства для обеспечения микроклимата в животноводческих и птицеводческих помещениях.
В системах микроклимата животноводческих помещений применяют вентиляторы низкого и среднего давления, центробежные общего назначения, осевые.
Центробежные вентиляторы (рис.1) общего назначения Ц4 – 70 предназначены для приточных вентиляционно-отпительных установок и вытяжных систем. Вентиляторы способны развивать высокое давление до 4000 Н/м2.
На одной оси с электродвигателем в специальном кожухе расположено лопастное колесо, при вращении которого воздух, поступающий через входное отверстие, попадает в каналы между направляющими колеса, а затем в выпускное отверстие.
Осевые вентиляторы типов МЦ и 06 – 320 применяют в системах микроклимата для приточно-вытяжной вентиляции и комплектования вентиляционно-отопительных агрегатов, подогревающих воздух до +40 0С. Состоят из вентилятора, насаженного на выходной вал электродвигателя и кожуха.
Вентиляторы выпускают правого и левого исполнения с насадкой и без нее. Могут быть укомплектованы различными электродвигателями, их подбирают по допустимой частоте вращения крыльчатки при мощности вентилятора, определяют заданным напором и подачей.
3. Воздухообмен животноводческого помещения.
За основу расчета вентиляции принять физиологические нормативы оптимальных температур, относительной влажности воздуха и предельно допустимого содержания углекислого газа. Наибольший показатель величины воздухообмена принимают за основу расчета вентиляционных систем.
Уравнение теплового баланса для расчета воздухообмена по оптимальной температуре:
![]()
где ![]() – количество теплоты, выделяемое животными;
– количество теплоты, выделяемое животными;
![]() – количество животных;
– количество животных;
![]() – потери теплоты в помещении через наружные ограждения;
– потери теплоты в помещении через наружные ограждения;
![]() – потери теплоты на вентиляцию;
– потери теплоты на вентиляцию;
![]() – потери теплоты на испарение влаги в помещении.
– потери теплоты на испарение влаги в помещении.
Количество теплоты, теряемое через наружные ограждения:
![]()
где ![]() – площадь ограждающих конструкций здания;
– площадь ограждающих конструкций здания;
![]() – суммарный коэффициент теплопередачи;
– суммарный коэффициент теплопередачи;
![]() – температура внутреннего воздуха;
– температура внутреннего воздуха;
![]() – температура наружного воздуха.
– температура наружного воздуха.
Потери теплоты на вентиляцию:
![]()
где ![]() – расчетный воздухообмен;
– расчетный воздухообмен;
![]() – весовая теплоемкость воздуха;
– весовая теплоемкость воздуха;
![]() – объемная масса воздуха.
– объемная масса воздуха.
Потери теплоты на испарение влаги в помещении:
![]()
Расчетный воздухообмен:
![]()
Количество теплоты, требуемое для обогрева помещения:
![]()
Воздухообмен по предельно допустимой влажности воздуха:
![]()
где ![]() – количество влаги, выделяемое животными;
– количество влаги, выделяемое животными;
![]() – количество влаги, испаряемое с пола;
– количество влаги, испаряемое с пола;
![]() – содержание влаги в свежем воздухе;
– содержание влаги в свежем воздухе;
![]() – предельно допустимое значение абсолютной влажности воздуха, при которой относительная влажность не превышает допустимой нормы.
– предельно допустимое значение абсолютной влажности воздуха, при которой относительная влажность не превышает допустимой нормы.
Воздухообмен по предельному содержанию CO2:
![]()
где ![]() – количество CO2, выделяемое одним животным;
– количество CO2, выделяемое одним животным;
![]() – допустимое содержание CO2 в помещении;
– допустимое содержание CO2 в помещении;
![]() – содержание CO2 в чистом воздухе.
– содержание CO2 в чистом воздухе.
Кратность воздухообмена в час:
![]()
где ![]() – объем помещения.
– объем помещения.
Если ![]() назначают вентиляцию с естественным побудителем. При
назначают вентиляцию с естественным побудителем. При  выбирают с искусственным побуждением воздуха. Если
выбирают с искусственным побуждением воздуха. Если ![]() выбирают вентиляцию с искусственным побуждением подогретого воздуха.
выбирают вентиляцию с искусственным побуждением подогретого воздуха.
Расчет мощности электродвигателя вентиляторов.
Исходными данными для выбора вентилятора является требуемая подача ![]() и развиваемое давление (напор)
и развиваемое давление (напор) ![]() .
.
Требуемая подача вентилятора:
![]()
где ![]() – расчетный воздухообмен;
– расчетный воздухообмен;
![]() – коэффициент, учитывающий потери в воздухопроводе.
– коэффициент, учитывающий потери в воздухопроводе.
Общие потери напора ![]() складываются из потерь на трение воздуха о стенки воздуховода
складываются из потерь на трение воздуха о стенки воздуховода ![]() и потерь от местных сопротивлений
и потерь от местных сопротивлений ![]() :
:
![]()
![]()
![]()
где ![]() – суммарный коэффициент сопротивления движения воздуха;
– суммарный коэффициент сопротивления движения воздуха;
![]() и
и ![]() – соответственно длина и диаметр воздуховода;
– соответственно длина и диаметр воздуховода;
![]() – скорость движения воздуха.
– скорость движения воздуха.
Мощность электрического двигателя на привод вентилятора:
![]()
где ![]() – коэффициент запаса мощности двигателя;
– коэффициент запаса мощности двигателя;
![]() – КПД вентилятора;
– КПД вентилятора;
![]() – КПД передачи.
– КПД передачи.
Существует несколько способов регулирования производительности вентиляторов. Наиболее перспективные:
– изменением характеристики сети (рис.3);
– изменением оборотов вращения электродвигателя (рис.4).
Зависимости ![]() ,
, ![]() и
и ![]() от оборотов вращения электродвигателя:
от оборотов вращения электродвигателя:

Механическая характеристика вентилятора
 Требуемый диаметр воздуховода определяется исходя из подачи и допустимой скорости движения воздуха в сети:
Требуемый диаметр воздуховода определяется исходя из подачи и допустимой скорости движения воздуха в сети:
![]()
Допустимая величина скорости равна 10 – 15 м/с.
4. Регулирование производительности вентиляционных установок.
Для привода вентиляторов выпускают электродвигатели модификации серии 4А, специализированные и разделяющиеся по условиям окружающей среды – химостойкого и сельскохозяйственного исполнения. Двигатели рассчитаны на эксплуатацию при температуре воздуха от –20 до +40 оС и относительной влажности воздуха, близкой к 100%, а также содержанием пыли до 3,5г/м3 с диаметром частиц не менее 1 мкм.
Подачу вентиляторов можно регулировать изменением: количества подключаемых вентиляторов; площади сечения воздуховода; оборотов вращения двигателя.
Наиболее перспективный третий способ регулирования производительности электровентиляторных установок.
Для регулирования оборотов вращения асинхронных двигателей применяют преобразователи частоты. При изменении частоты тока ![]() в цепи обмотки статора меняется синхронная частота вращения поля:
в цепи обмотки статора меняется синхронная частота вращения поля:
![]()
Максимальный момент асинхронного электродвигателя:
![]()
где ![]()
Из этого выражения следует, что с изменением частоты питающего напряжения ![]() меняются максимальный момент двигателя, а следовательно, и его перегрузочная способность:
меняются максимальный момент двигателя, а следовательно, и его перегрузочная способность:
![]()
Поэтому, чтобы сохранить перегрузочную способность двигателя на требуемом уровне, необходимо одновременно с изменением частоты тока ![]() менять напряжение сети
менять напряжение сети ![]() , подводимое к обмотке статора.
, подводимое к обмотке статора.
Для вентиляторного характера нагрузки, когда напряжение ![]() , подводимое к обмотке статора, необходимо изменять пропорционально квадрату частоты переменного тока:
, подводимое к обмотке статора, необходимо изменять пропорционально квадрату частоты переменного тока:
![]()
Механические характеристики выглядят следующим образом (рис.6).
Из графика видно, что момент растет пропорционально квадрату частоты вращения.
Применяемое в электроприводах частотное регулирование на основе преобразователя частоты позволяет регулировать частоту переменного тока как «вниз», так и «вверх» от номинальной.
Преобразователь состоит из управляемого выпрямителя УВ и автономного инвертора АИ, которые управляются от системы импульсно-фазового управления СИФУ (рис.7).
Управляющий импульс ![]() поступает на вход СИФУ из системы автоматического регулирования (САР). Этот импульс имеет информацию о значениях напряжения
поступает на вход СИФУ из системы автоматического регулирования (САР). Этот импульс имеет информацию о значениях напряжения ![]() и частоты
и частоты ![]() , которые необходимо подать на обмотку статора, чтобы обеспечить требуемый режим работы двигателя. На выходе СИФУ формируется импульсы
, которые необходимо подать на обмотку статора, чтобы обеспечить требуемый режим работы двигателя. На выходе СИФУ формируется импульсы ![]() и
и ![]() . Сигнал
. Сигнал ![]() подается на вход управляемого выпрямителя УВ и определяет уровень напряжения постоянного тока
подается на вход управляемого выпрямителя УВ и определяет уровень напряжения постоянного тока ![]() , которое на вход автономного инвертора АИ, чтобы ну входе ПЧ обеспечить требуемое значение напряжения
, которое на вход автономного инвертора АИ, чтобы ну входе ПЧ обеспечить требуемое значение напряжения ![]() . Частотный импульс
. Частотный импульс ![]() поступает на инвертор АИ и определяет значение частоты переменного тока
поступает на инвертор АИ и определяет значение частоты переменного тока ![]() на выходе ПЧ.
на выходе ПЧ.
Требуемая связь между значениями частоты ![]() и напряжения
и напряжения ![]() на выходе ПЧ регулируется его параметрами в соответствии с требованиями режимов регулирования: режима постоянной мощности либо режима постоянного момента.
на выходе ПЧ регулируется его параметрами в соответствии с требованиями режимов регулирования: режима постоянной мощности либо режима постоянного момента.
Основной недостаток тиристорных ПЧ – несинусоидальность выходного напряжения и наличие высших гармоник.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
