


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Для выполнения работы необходимо установить в качестве имени текущего проекта 1аЬ4. Для этого выберем в меню пункт File |Ргоjесt| и в диалоговом окне выберем имя 1аЬ4. Выполним трансляцию проекта с помощью приложения Соmрiler, предварительно установив опцию Тotal Rесоmpile в меню Рrосеssing.
Подключим питание к LаbКit, откроем приложение Рrоgrammer и загрузим код конфигурации в ПЛИС.
Тестирование устройства. Сразу после загрузки кода конфигурации в ПЛИС устройство начнет работать. При создании рабочих программ для реальных систем управления придерживаются следующей последовательности действий, которую мы и воспроизведем во время теста:
1. Установим начальные значения регистра управления. Для этого отключим блок счетчика/таймера, сбросив бит T0ON (установив переключатель Sw1 макета в положение Off). При этом какой бы режим блока счетчика/таймера не был установлен, поскольку значение таймерного регистра (данных) не инкрементируется, запроса на прерывание не возникает и рабочая программа микроконтроллера будет передавать управление только программно. Обычно такое значение устанавливается в микроконтроллерах при включении питания (по умолчанию), значения остальных битов регистра управления могут быть неопределенными.
2. Замаскируем прерывание от блока счетчика/таймера, сбросив бит Т0IЕ (Sw2). Прерывание всегда необходимо маскировать до окончания программирования блока, в противном случае может произойти нежелательный вызов процедуры обработки прерывания.
3. Выберем источник сигнала для блока счетчика/таймера. Для этого воспользуемся битом T0CS (с помощью переключателя Sw3 установим либо режим счетчика - On, либо режим таймера Off). Если установлен режим счетчика внешнего сигнала (в работе он поступает от кнопки Keyl), то выставим активный уровень сигнала с помощью бита T0SE (переключатель Sw4 в положении On - срез, Off - фронт). Если используется режим таймера, то значение бита T0SE не имеет значения.
4. Выберем значение коэффициента деления (масштабирующего коэффициента) с помощью битов PS2..PS1 (переключатели Sw5..Sw8). Если масштабирующий регистр не будет использоваться, что определяется битом PSA (переключатель Sw5 положении On), то установленное значение игнорируется, хотя как видно из рис.4.1, масштабирующий регистр все равно будет инкрементироваться и это будет видно на индикаторе 1. Если необходимо включить масштабирование, то бит PSA должен быть сброшен (переключатель Sw5 установлен в положение Off).
5. Если прерывание блока счетчика/таймера будет обрабатываться в гипотетической программе микроконтроллера, то необходимо разрешить его. Для этого необходимо установить бит T0IE = 1 (переключатель Sw2 в положение On). Но если в этот момент флаг запроса на прерывание Т0IF уже установлен, программа сразу перейдет к процедуре обработки прерывания. Для того, чтобы нежелательный переход не произошел, необходимо перед разрешением прерывания сбросить флаг запроса. Для этого необходимо воспользоваться кнопкой КеуЗ.
6. Теперь все готово, можно запустить счетчик/таймер (установить Sw1 в положение On) и наблюдать на индикаторах результаты его работы.
Для полного тестирования блока счетчика/таймера необходимо повторить пункты 1-6, перебирая все возможные режимы. Необходимо проверить различные источники сигнала. В случае внешнего источника сигнала необходимо проверить срабатывание таймера от разных активных уровней. При этом в одном случае инкремент значения будет происходить при нажимании кнопки, а в другом при отпускании. Следует отметить, что в целях упрощения работы не рассматривалась схема защиты от дребезга, который возникает при нажатии кнопки. Этот эффект выражается в том, что при нажатии (отпускании) кнопки внешнего тактового сигнала значение таймера может инкрементироваться сразу на несколько значений. Такой эффект является нежелательным в реальных системах, его подавляют с использованием программных или аппаратных средств.
Далее необходимо проверить работу масштабирующего регистра. Для этого следует, изменяя значения PS2..PS0, добиться различной скорости работы блока счетчика/таймера.
После этого, разрешив прерывание, дождаться переполнения таймерного регистра. При этом загорится светодиод Ledl (крайний левый) и раздастся звуковой сигнал. Флаг запроса на прерывание сбрасывается с помощью кнопки КеуЗ.
Проверить процедуру сброса значения таймерного регистра (данных) при нажатии кнопки Кеу2. Следует обратить внимание, что при записи любого значения (в работе всегда 0) в таймерный регистр значение масштабирующего регистра сбрасывается.
Временной анализ и определение временных задержек распространения сигнала.
Для проведения временного анализа устройства необходимо провести компиляцию проекта с выделением временной информации. Для этого необходимо убедиться, что в качестве текущего проекта установлен головной файл 1аЬ4. После этого открыть приложение Compiler, включить опцию Timing SNF Extractor (меню Processing) и запустить процесс компиляции. После успешного завершения компиляции все готово к проведению временного анализа.
Запустите приложение Timing Analyzer (меню MAX+plus П), укажите тип анализа и определите цепи проекта (nodes), временные задержки между которыми должны измеряться. Для выбора типа анализа используется меню команды Analysis. Для задания цепей (сигналов) служит меню команды Node, при помощи которого вводятся имена интересующих сигналов. Выбранные имена будут отображаться на заголовках строк и столбцов матрицы задержек.
Для запуска процедуры анализа необходимо в окне анализатора щелкнуть указателем мыши по панели Start. По результатам анализа будет сформирована и отображена матрица задержек, на пересечении каждой строки и столбца будет указано время распространения сигнала.
При выборе в качестве типа анализа пункта меню Analysis|Registered Performance можно определить предельную частоту, на которой устройство способно работать. Выполнив анализ, и выбрав в выпадающем списке порт Key1, который в работе является источником внешнего сигнала, мы найдем предельную частоту сигнала от внешнего источника, при которой таймерный блок работает правильно (рис.4.2.)
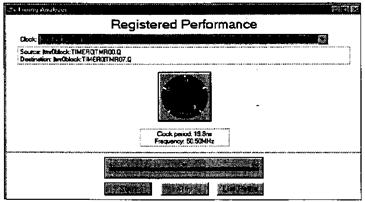
Рис.4.2. Результаты расчета быстродействия устройства
Следует отметить, что временной анализ имеет смысл только после процедуры размещения/трассировки и назначения ресурсов ПЛИС - реализуемому устройству. В работе этой процедуре подвергалось устройство, включающее не только блок счетчика/таймера, но и блок интерфейса. Кроме того, определенные выводы ПЛИС на плате лабораторного макета заранее подключены к определенным внешним устройствам. При таких условиях процедура размещения получила жесткие ограничения и временные параметры (быстродействие) нашего устройства снизилось.
ЗАДАНИЯ
1. Изменить исходный текст таким образом, чтобы сделать таймерный блок реверсивным. При этом значение таймерного регистра при сбросе должно инициализироваться значением FF, вместо ин-кремента должен выполняться декремент, а флаг запроса на прерывание должен выставляться при прохождении значения от 0 к FF (underflow).
2. Дополнить таймерный блок функцией захвата-сравнения (Capture-Compare). Для этого предлагается изменить назначение бита T0ON, который будет задавать режим блока (1 - захват сигнала, 0 - сравнение). В режиме захвата по сигналу от кнопки Кеу2 значение таймерного регистра должно фиксироваться в регистре захвата. В режиме сравнения регистр захвата содержит некоторую константу, которая заносится на этапе конфигурации микросхемы. По кнопке Кеу2 таймерный блок начинает считать сигнал, с нуля. При совпадении значений таймерного регистра и регистра сравнения таймер останавливается и возникает запрос на прерывание. Значение занесенной на этапе конфигурации константы в регистр сравнения можно наблюдать на дисплеях таймерного регистра, поскольку значения совпадают.
3. Разработать реверсивный 4-разрядный кольцевой регистр сдвига с параллельным вводом данных. Режим работы задается микрокомандой М = mlm0: хранение при mlm0=00, ввод данных при mlm0=11, сдвиг вправо при mlm0=01, сдвиг влево при mlm0=10.
Вводимые данные устанавливаются переключателями S4-S1, микрокоманда М - переключателями S8-S7, вывод результата на све-тодиоды L4-LL Сигналы ввода - сдвига подаются нажатием кнопки К1.
4. Разработать счетчик с переменным модулем счета Кс — 10/11 и предварительным сбросом в 0, Модуль счета задается управляющим сигналом М: Кс=10 при М=0, Кс=11 приМ=1.
Сигнал управления М устанавливается переключателем^88. Сброс счетчика в состояние 0000 производится при нажатии кнопки К1, счет - при нажатии кнопки К2. Результат выводится на светодиоды L4-L1, светодиод L8 указывает режим работы (значение сигнала М).
5. Разработать двоично-десятичный счетчик с модулем счета Кс = 100 (две декады) и предварительным сбросом в 0.
Сброс счетчика в состояние производится при нажатии кнопки К1, счет - при нажатии кнопки К2. Результат выводится на светодиоды L4-L1 - младшая декада, светодиоды L8-L5 - старшая декада.
Возможный вариант - включение звукового сигнала при содер-жимом счетчика более 9 (переход ко второму десятичному разряду). Раз-решение подачи звукового сигнала путем установки переключателя S1.
6. Разработать генератор последовательности чисел от 0 до 9 в пря-мом коде и коде "с избытком 3". Режим работы задается управляющим сигналом М: прямой код при М=0, код "с избытком 3" при М-1.
Сигнал управления М устанавливается переключателем S8. Сброс генератора в состояние 0000 производится при нажатии кнопки К1, генерация очередного числа - при нажатии кнопки К2. Результат выводится на светодиоды L4-L1, светодиод L8 указывает режим работы (значение сигнала М).
7. Разработать генератор последовательности чисел от 0 до 63 в прямом и дополнительном коде. Режим работы задается управляющим сигналом М: прямой код при М=0, дополнительный код при М=1.
Сигнал управления М устанавливается переключателем S8. Сброс генератора в состояние 000000 производится при нажатии кнопки К1, генерация очередного числа - при нажатии кнопки К2. Результат выводится на светодиоды L6-L1, светодиод L8 указывает режим работы (значение сигнала М).
8. Разработать генератор последовательностей 4-битовых кодов (1-1и и контролем числа сформированных последовательностей (до п=7). Выбор последовательности задается управляющим сигналом М: 1-я последовательность при М=0, 2-я последовательность приМ=1.
Сигнал управления М устанавливается переключателем S8. Сброс генератора в исходное состояние (0000 при М=0, 0001 при М=1) производится при нажатии кнопки К1, генерация очередного кода - при нажатии кнопки К2. Результат выводится на светодиоды L4-L1. Светодиоды L8-L6 указывают число n сформированных последовательностей каждого вида: п=0 устанавливается при сбросе в исходное состояние и каждом изменении значения М, значение п увеличивается на 1 после завершения очередной последовательности (перехода к исходному состоянию).
Возможный вариант - выдача звукового сигнала с помощью пьезоизлучателя, если значение n превысит 7.
9. Разработать электронный секундомер, обеспечивающий индии-кацию секунд и минут.
Сброс секундомера по нажатию кнопки К1, запуск по нажатию кнопки К2. Индикация числа секунд светодиодами L6-L1, минут - светодиодами L8-L7. Возможный вариант - индикация числа секунд индикаторами D2-D1, минут - индикатором D3.
10. Разработать таймерный блок, формирующий выходной сигнал Q=l в заданный момент времени со звуковой индикацией. Время формирования определяется совпадением содержимого таймера X и заданного значения Y.
Значение времени Y задается в пределах 10-30 секунд и устанавливается с помощью переключателей S8-S1. Его значение выводится на светодиоды L8-L1 или индикаторы D3-D1. Формирование сигнала Q=l фиксируется звуковым сигналом пьезоизлучателя. Звучание пьезоизлучателя обеспечивается с помощью генератора сигналов звуковой частоты, реализованного на используемой в макете ПЛИС.
11. Разработать звуковой генератор с программируемой частотой, использующий пьезоизлучатель. Реализовать 8 значений частоты звука, кратные двум (коэффициенты деления 8) в диапазоне 500 Гц - 5 кГц. Коэффициент деления устанавливается переключателями S3-S1, значения частоты индицируются с помощью светодиодов L8-L1 или 7-сегментных индикаторов D3-D1. Включение генератора осуществляется нажатием кнопки К1.
12. Разработать звуковой генератор переменной частоты, использующий пьезоизлучатель. Период звучания программируется в пределах от 1 до 15 с, диапазон частот Гц, число градаций частоты не менее 20 (частота звука постепенно меняется за время периода звучания)
Период звучания устанавливается переключателями S4-S1, текущее значение частоты (три старших десятичных разряда) индицируется с помощью 7-сегментных индикаторов D3-D1. Включение генератора осуществляется нажатием кнопки К1.
13. Разработать реверсивный счетчик с модулем счета Кс=16 и предварительной записью данных и индикацией переполнения. Режим работы задается управляющим сигналом М: прямой счет при М=0, обратный счет при М=1.
Вводимые данные устанавливаются переключателями S4-S1, сигнал управления М устанавливается переключателем S8. Ввод данных производится при нажатии кнопки К1, счет - при нажатии кнопки К2. Результат выводится на светодиоды L4-L1. Переполнение фиксируется зажиганием светодиода L8 при переключении счетчика в состояние 0000 при прямом счете, в состояние 1111при обратном счете.
Возможный вариант - выдача при переполнении звукового сигнала с помощью пьезоизлучателя.
14. Разработать генератор последовательностей 4-битовых кодов, определяющих простые числа. Сброс генератора в исходное состояние (0000) производится при нажатии кнопки К1, генерация очередного кода - при нажатии кнопки К2. Результат выводится на светодиоды L4-L1. Светодиоды L8-L6 указывают количество n сформированных чисел: п=0 устанавливается при сбросе в исходное состояние, значение п увеличивается на 1 после вывода очередного числа.
15. Разработать генератор последовательностей 4-битовых кодов, формирующих последовательно числа кода Грея. Сброс генератора в исходное состояние (0000) производится при нажатии кнопки К1, гене-рация очередного кода - при нажатии кнопки К2. Результат выводится на светодиоды L4-L1. Светодиоды L8-L6 указывают количество n сфор-мированных чисел: п=0 устанавливается при сбросе в исходное сос-тояние, значение п увеличивается на 1 после вывода очередного числа.
Примечание: возможно выполнение вариантов заданий 1-7 с вы-водом результата на 7-сегментные дисплеи.
ЛАБОРАТОРНАЯ РАБОТА № 5
УРТК устройство и принцип действия.
Время на выполнение лабораторной работы – 3 часа
Время самостоятельной работы студента – 3 часа
Цель работы - Изучение конструкции робота, его характе-ристик, кинематические структуры степеней подвижности, а также управления и методики программирования цикла работы.
Постановка задачи
Задача состоит в изучении системы управления роботами, которая обеспечивает позиционирование терминального устройства робота в некоторых определенных точках S(ti) пространства. В этом случае управление на исполнительном уровне сводится к позиционному управлению: точки, заданные внешними координатами S(ti), преобразуются в соответствующие внутренние (обобщенные) координаты q(ti) и затем производится управление положением робота от точки к точке, которые заданы внутренними координатами. В этом случае отсутствует координация между сочленениями робота, поэтому траектория перемещения схвата между заданными точками S(ti) произвольна.
Требуемое оборудование и ПО:
1. Учебный робот УПРК с пультом управления.
2. ПЭВМ IBM PC.
3. Операционные системы MS DOC, Windows.
Указания по выполнению лабораторной работы
1. При подготовке к практическим занятиям самостоятельно изучите теоретический материал, изложенный в лекции, в настоящих указаниях и/или прочитайте соответствующий материал в литературе, включенной в список. Подготовка к работе осуществляется во внеаудиторное время.
2. Получите у преподавателя индивидуальное задание по лабора-торной работе.
3. Составьте с использованием методических указаний алгоритм программы управления транспортным роботом, используя текстовый редактор, подготовьте файл для ввода программы. Описание алгоритма и файл представьте преподавателю для проверки.
4. После получения допуска студент приступает к практической работе с роботом.
ОСНОВНЫЕ ПОНЯТИЯ
Промышленные роботы
Промышленный робот - это переналаживаемая автоматическая машина, состоящая из механизма, информационно-измерительной, управляющей и исполнительной систем и предназначен для выполнения механических действий в производственном процессе. Манипулятором промышленного робота принято называть устройство, состоящее из механизма с кинематической цепью, приводов и рабочего органа (например, захватов) и предназначенное для имитации рабочих функций руки человека.
Применяют более точное определение промышленных роботов: перепрограммируемый многофункциональный манипулятор, предназначенный для осуществления различных заранее заданных перемещений материалов, деталей, инструментов или специальных приспособлений с целью выполнения различных работ.
Промышленные роботы, манипуляторы и робототехнические комплексы (РТК) делят на три вида: автоматические, применяющиеся в основном в промышленном производстве и станкостроении; дистанционно-управляемые, работающие в экстремальных условиях (высокие температуры, загазованность, радиоактивность) , и ручные, используемые для погрузочно-разгрузочных работ. Среди автоматических роботов-манипуляторов можно выделить четыре вида: жестковстроенные, программируемые, адаптивные, и “интеллектуальные”. Жестковстроенные манипуляторы содержат механические руки (автооператоры) без перестраиваемых программных устройств и представляют собой нулевое “добротное” поколение. Остальные роботы образуют три поколения, которые не сменяют друг друга, а существуют параллельно и продолжают совершенствоваться - каждый в пределах своего поколения.
Основными компонентами робота являются манипуляционный механизм и автоматическая система управления, содержащая, как пра-вило, микро-ЭВМ или комплекс микропроцессоров, а в ряде случаев и сенсорные устройства (средства очувствления). Манипулятор робота сос-тоит из звеньев, соединенных подвижными кинематическими парами (вращательными и поступательными). Последние движутся по опре-деленной программе с помощью управляемых приводов.
Перепрограммируемость - свойство промышленного робота заме-нять управляющую программу автоматически или при помощи человека-оператора. К перепрограммированию относится изменение после-довательности и (или) значения перемещений по степеням подвижности (свободы) и управляющих функций с помощью средств управления на пульте устройства управления.
Рабочий орган - составная часть исполнительного устройства промышленного робота для непосредственного выполнения техно-логических операций и (или) вспомогательных переходов. Примерами рабочего органа служат сварочные клещи, окрасочный пистолет, сбо-рочный инструмент, захватное устройство.
Благодаря наличию степеней свободы и гибкой системы управления робот является многофункциональной машиной. Это отвечает требо-ваниям гибкой перенастройки производства на различные техно-логические процессы.
По технологическому назначению различают два класса роботов - универсальные и специализированные. Универсальные роботы приме-няются в широком спектре технологических процессов и способны пере-программироваться для разнообразных циклов движений. К специ-ализированным роботам относятся сварочные, окрасочные и др., при-способленные для определенного вида технологических операций.
Грузоподъемность робота-манипулятора характеризуется макси-мальной суммарной подъемной силой, развиваемой его “руками“. Число степеней свободы равно количеству всех возможных коор-динатных перемещений кисти руки робота без учета движения захвата детали. Рабочая зона робота характеризуется максимальным радиусом обслуживания от оси захвата до оси симметрии корпуса робота, а также перемещениями руки и корпуса манипулятора.
Погрешность позиционирования характеризуется отклонением за-данной позиции исполнительного механизма от фактической при многократном повторении движения. Она выражается линейными и угловыми единицами. Система управления определяется устройствами управления робота.
Пространство, в котором может находиться схват при неподвижном основании робота, называют рабочей зоной. Пространство, в котором может находиться схват с учетом перемещений основания робота, на-зывают рабочее пространство робота.
Устройство и принцип действия УРТК
В лабораторной работе используется учебный робототехнический комплекс, предназначенный для организации наглядного обучения основам программирования, управления робототехническими устрой-ствами и знакомства с элементами гибких производственных систем. С его помощью моделируется работа грузоподъемных устройств, автоматизированных транспортных систем, металлообрабатывающих станков (сверлильного, фрезерного, гравировального) и станков типа “обрабатывающий центр”.
Комплекс состоит из манипулятора, блока сопряжения и подключается к ДВК2, ДВК3 через плату И2.
Манипулятор имеет:
семь степеней свободы (пять степеней подвижности);
тип привода – электротехнический;
точность движений – 0,5 мм;
грузоподъемность – 0,2 кг;
рабочая зона – два куба со стороной, равной 26 см.
Кинематическая схема манимулятора приведена на рис. 5.1, где символами DX, DY, DZ и стрелками обозначены крепления датчиков исходного (начального) положения манипулятора и датчиков относительных линейных перемещений вдоль осей OX, OY, OZ. Манипулятор имеет возможность поворачивать схват относительно оси OY на 90° и разворачиваться на 90° относительно вертикальной оси (степени свободы W и F соответственно). Места установки датчиков исходного положения для этих степеней подвижности DW и DF. Состояния “открыт-закрыт” схватка деталей и “включен-выключен” инструментальных блоков определяют R и S.
Рис. 5.1 Кинематическая схема манипулятора: 1 – устройство захвата для деталей и заготовок, 2 – устройство захвата для инструмента
Конструкция манипулятора (рис.5.2) содержит основание, несущее три взаимно перпендикулярных модуля, каждый из которых состоит из трапецеидальной винтовой пары и двух цилиндрических направляющих (поз.2). Привод на винт осуществляется от электродвигателя постоянного тока со встроенным редуктором через жесткую муфту (поз.3). Вращение закрепленного на ходовом винте электродвигателя преобразуется в виде каретки (поз.4), которая прикреплена к винтовой гайке. Число оборотов винтовой пары контролируется фотоимпульсными датчиками, а исходное нулевое положение устанавливается по аналогичным или магнитоуправляемым датчикам.
Исполнительный механизм состоит из поворотной головки (поз.6), содержащей схваты деталей-заготовок (поз.7) и инструментальных блоков (поз.8).
Для перемещения поворота и захвата детали или инструмента на электродвигатели по управляющему сигналу подается напряжение от ЭВМ. В процессе обработки управляющего сигнала в ЭВМ через устройство сопряжения поступают информационные сигналы с датчиков (поз.5) о числе оборотов винта (на один оборот приходится восемь импульсов с фотоимпульсного датчика). Поворот головки осу-ществляется реверсированием двигателя до момента получения информационных сигналов от конечных выключателей (поз.9).

Рис. 5.2 Конструкция манипулятора
В зоне действия манипулятора имеются магазин инструментальных блоков (рис. 5.3 поз. 2), два стеллажа для хранения деталей и заготовок и позиция обработки.
Предусмотрена возможность автоматической смены инстру-ментального блока. Каждый инструментальный блок содержит встро-енный электропривод и штанговый зажим режущего инструмента. При использовании пишущих узлов в качестве инструмента манипулятор будет работать как графопостроитель.
Рис. 5.3 Схват инструментальных головок и магазин.
Для управления манипулятором разработан пакет программ: программы нижнего уровня написаны на ассемблере и осуществляют обмен информации между ЭВМ и блоком сопряжения ; программы верхнего уровня - на паскале и реализуют алгоритм управления манипулятором, что позволяет учащимся самостоятельно их моди-фицировать ( обращение из верхнего уровня в нижний происходит с помощью оператора home).
Обращение home x, y, z вызывает линейное перемещение, home f, w - угловое. Все вычисления должны производиться вручную.
Для каждого перемещения пересчитываются координаты отно-сительно предыдущих: Результатом является правильная траектория движения манипулятора.
Характеристики робота:
Способ установки робота - настольный.
Габаритные размеры - 540х550х600 мм
Рабочее пространство робота - по оси X мм,
Рабочее пространство робота - по оси Y – мм,
Рабочее пространство робота - по оси Z – мм.
Рабочее пространство робота - по оси W - ...мм.
Рабочая зона робота - два куба со стороной, 260мм
Тип привода - электротехнический.
Тип управления - цикловое программное.
Исполнение - нормальное.
Точность позиционирования - 1мм на 100мм хода по осям X, Y,Z.
Быстродействие - малое.
Максимальная скорость – 13 мм/с.
Грузоподъемность - 50 грамм
Способ передачи движений - зубчатые механизмы (червячный ре-дуктор).
Движения робота по осям X, Y,Z - возвратно-поступательные.
Источник энергопитания - ~ 220 Вольт
Тип захватного устройства - клещевой механический схват, с электроприводом (рычажно-кулисный механизм).
Схват - обьем не более 45мм.
Число манипуляторов - 2.
Число степеней свободы - 5.
Число степеней подвижности - 7.
Система координат - прямоугольная.
Меры предосторожности при работе с УРТК
1. Соблюдать технику безопасности при работе с электропри-борами.
2. Не начинать работу с УРТК без разрешения преподавателя.
3. Если после включения пульта робот начинает двигаться само-произвольно, необходимо сразу выключить установку и позвать пре-подавателя.
4. Не допускать превышения углов поворота по оси W, если угол больше максимального УРТК необходимо выключить.
5. Если робот достиг предельного положения, а двигатель про-должает вращаться - немедленно выключить установку.
6. Следить, чтобы при включении пульта тумблер “ручн/авт” нахо-дился в положении “ручн” .
7. Следить за сохранностью подводящих проводов, не допускать перегибов, попадания их между движущимися частями робота и натяжения во время работы. В случае обрыва или натяжения проводов срочно выключить установку.
8. В случае любых других неисправностей, пульт необходимо вык-лючить и сообщить преподавателю о поломке.
Перемещение груза
Методика составления алгоритма на ПЭВМ для управления транспортным роботом.
1. Дано:
координаты источника - (откуда переместить;0)
вес груза -
форма груза -
координаты приемника - (куда переместить) - (0;0)
Требуется:
рассчитать траекторию и подготовить управляющий роботом файл для отработки движений роботом по перемещению груза.
1. Первый оператор HOME возвращает манипулятор в исходное по-ложение.
2. Переместим по оси X 0 -->70
3. Переместим по оси Y 0 -->20.
4. Поворот захвата W на 85 °.
5. Опустим по оси Z -->50.
6. Включим захват С on.
7. Переместим деталь на нужное расстояние задавая свои значения X, Y, Z
8. Выключим захват С off.
2. Пример программы:
homexyz
homefw
x+50
y+50
z+100
c on
f+30
c off
d on
w+30
d off
homexyz
homefw
3. Реализация
1. Включить пульт.
2. Установить робот в исходное положение с пульта используя клавиши X, Y, Z, F, W, схват.
3. В соответствии с заданием разложить складские детали.
4. C помощью клавиш X, Y, Z, F, W, схват проверить алгоритм по операциям с пульта (вручную).
5. При необходимости внести коррективы в алгоритм.
6. Подключить ПЭВМ.
7. Запустите программу управления роботом.
8. Провести серию испытаний.
9. Выключить пульт привести в порядок рабочее место.
10. Составить отчет.
4. Форма отчета
Таблица 5.1
Номер испытания | Перемещения по осям | Погрешности при перемещении | |||||||||
X | Y | Z | W | F | X | Y | Z | W | F |
| |
1 |
| ||||||||||
2 |
| ||||||||||
3 |
| ||||||||||
4 |
| ||||||||||
5 |
|
5. Контрольные вопросы.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
