

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Теория поля Курта Левина и субъектные онтологии
В этой работе я постараюсь показать, что теория психологического поля немецкого психолога Курта Левина (), основные понятия и методы этой теории, представляют из себя органичное выражение идей и методов развиваемой мной модели субъекта, которую я обозначаю термином «субъектная онтология» (см. напр. ). Разворачивая дальнейшую аргументацию в обоснование этого тезиса, я вначале кратко коснусь основных понятий теории поля Левина, а затем приведу ряд примеров их интерпретации на основе понятий модели субъектных онтологий, используя для этого главным образом работы К. Левина из недавно опубликованной у нас в России книги «Теория поля в социальных науках» (), содержащей 10 статей немецкого психолога по различным вопросам теории поля. В плане быстрого и достаточно репрезентативного ознакомления с концепцией Левина, читатель может обратиться, например, к ().
1. Основные понятия теории поля и их соответствие с понятиями теории субъектных онтологий.
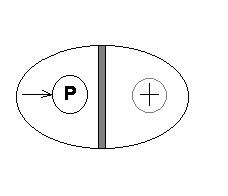
По представлениям К. Левина, в каждый момент времени субъект существует в рамках жизненного пространства (L), частью которого является он сам (Р, person) и его психологическая среда (Е). В отношениях этих сущностей для Левина пока важно лишь то, что это некоторые целостности, регионы, и регион Р находится внутри L, будучи окруженным со всех сторон регионом Е:

Жизненное пространство – это не мир объектов, это некоторая «смесь» объектных факторов и внутреннего мира субъекта, субъектно нагруженная реальность, влияющая на поведение субъекта. Это как раз субъектная онтология в широком смысле этого слова, т. е. образ реальности как он воспринимается субъектом, тот психологический мир, в котором живет данный субъект.
Область Р далее дифференцируется на перцептуально-моторный (Р-М) и внутренний (I-P) регионы. Во внутреннем регионе выделяются периферические (р) (граничащие с перцептуально-моторным) и центральные (с) регионы. Наконец, на множество различных регионов может быть разбита и психологическая среда. В целом, получаем такую более сложную картину жизненного пространства субъекта:

Такая дифференциация выражает разделение региона Р-М на область либо восприятия психологической среды – и тогда регион Р-М выступает своей перцептивной стороной, либо движения (локомоции) в среде – тогда регион Р-М предстанет своей моторной стороной. Локомоция выражается в том, что регион Р целиком сдвигается в какой-то иной регион психологической среды. Дифференциация внутреннего (I-P) региона субъекта на р - и с-регионы выражает факт существования у субъекта ряда потребностей, так что каждому внутриличностному региону соответствует своя потребность, которую в данный момент испытывает субъект. Наконец, дифференциация психологической среды на регионы выражает факт существования некоторых значимых для субъекта факторов (валентностей) в среде, так что каждому региону среды соответствует своя какая-то валентность, осознаваемая субъектом в данный момент. В разные моменты времени структура жизненного пространства может быть различной, могут появляться новые регионы, исчезать старые, или старые регионы могут дифференцироваться, выделяя в себе подрегионы, и т. д. Между соседними регионами существуют границы, которые могут быть более или менее проницаемыми, что может влиять на локомоцию. Внутриличностные регионы способны влиять друг на друга, вступать друг с другом в связь, коммуникацию. Такое влияние также зависит от степени проницаемости границ этих регионов. Каждый регион может обладать более или менее податливой – для коммуникаций или локомоций - средой. Переструктурирования жизненного пространства, локомоции и коммуникации объединяются Левином под общим термином «событие». Среди более содержательных принципов дифференциации жизненного пространства Левин часто выделяет степень реальности и временн![]() ю перспективу. Степень реальности региона психологической среды выражает его отнесение к воображаемому или действительному миру. Временная перспектива – это регионы, связанные с образами прошлого, настоящего и будущего, но существующие у субъекта в данный момент времени. Вообще жизненное пространство – это всегда то, что определено для субъекта в настоящий момент времени. Поведение (В) субъекта в данный момент времени – это функция жизненной среды в этот же момент времени, т. е. В = f(L) = f(P+E), где L=P+E, и «+» - операция объединения.
ю перспективу. Степень реальности региона психологической среды выражает его отнесение к воображаемому или действительному миру. Временная перспектива – это регионы, связанные с образами прошлого, настоящего и будущего, но существующие у субъекта в данный момент времени. Вообще жизненное пространство – это всегда то, что определено для субъекта в настоящий момент времени. Поведение (В) субъекта в данный момент времени – это функция жизненной среды в этот же момент времени, т. е. В = f(L) = f(P+E), где L=P+E, и «+» - операция объединения.
Пока представленные конструкты теории поля описывают преимущественно субъектную статику. Но настоящий центр теории поля – это субъектная динамика. Основные понятия здесь – понятия «энергия», «напряжение», «потребность», «валентность», «локомоция», «сила».
Левин считает, что существует психическая энергия, которая высвобождается, когда субъект выравнивает напряжения в разных частях системы. Резервуарами напряжений являются внутриличностные регионы. Напряжения могут возрастать или падать в этих регионах, перетекать от региона с более высоким напряжением к региону с меньшим напряжением. Процессы распределения напряжения зависят от проницаемости границ и текучести-ригидности регионов. Также напряжение из внутриличностных регионов может попадать в перцептуально-моторный регион, вызывая его активность. Но основной процесс сброса напряжения не этот. Напряжение во внутриличностном регионе всегда связано с некоторой валентностью в регионе психологического пространства. Если валентность положительна, то вхождение (локомоция) в этот регион снимет напряжение. Если же валентность отрицательна, то, наоборот, напряжение будет снижаться по мере удаления от региона с отрицательной валентностью. Передаточным звеном между напряжением во внтуриличностном регионе и локомоцией относительно его валентности является сила. Конструкт силы Левин рассматривает как вектор, направленный к положительной валентности или от отрицательной валентности и приложенный своим окончанием к границе региона Р:

Величина этого вектора выражает величину силы.
Итак, возникает единство внутриличностного региона вместе с напряжением в нем, валентности во внеличностном регионе, силы и возможной локомоции. Величина напряжения, как мера неравновесия, выражает величину психической энергии. Такое единство напряжения, валентности и силы образует потребность. Наиболее типичный способ удовлетворения потребности – это осуществление соответствующей локомоции. Можно и обернуть это утверждение: там, где есть какое-либо удовлетворение потребности, его можно представить как локомоцию относительно валентного региона. Левин различает также потребности и квазипотребности. Квазипотребность – это социально-опосредованная потребность, например, желание не просто поесть, а поесть в конкретном ресторане. Подводя итог, можно заключить, что поле – это целостность всех описанных выше составляющих жизненного пространства.
Приведу пример из (, С.312-313), иллюстрирующий субъектную динамику, по Левину. «Например, ребенок проходит мимо конфетной лавки, заглядывает в окошко и хочет конфет. Вид конфеты побуждает потребность, а эта потребность делает три вещи. Она высвобождает (мне кажется, что здесь точнее говорить не о высвобождении, а о порождении энергии, поскольку далее речь идет о повышении напряжения, в то время как высвобождение энергии скорее понимается как сброс напряжения – В. М.) энергию и тем самым повышает напряжение во внутреннем регионе (система «хотения конфет»). Она наделяет положительной валентностью регион, в котором находятся конфеты. Она порождает силу, толкающую ребенка в направлении конфеты. Скажем так: ребенку нужно войти в лавку и купить конфету. Эту ситуацию можно представить так, как изображено на рис. (см. ниже – В. М.). Предположим, однако, что у ребенка нет денег: тогда граница между ним и конфетой оказывается непроходимым барьером. Он подойдет к конфете как можно ближе, быть может, засунет нос в окно, но не сможет достать ее.
Он может сказать себе: «Если бы у меня были деньги, я бы купил конфет. Может быть мама даст мне немного денег». Иными словами, рождается новая потребность, или квазипотребность, - намерение взять у мамы денег. Это намерение, в свою очередь, побуждает напряжение, вектор и валентность, что представлено на рис.
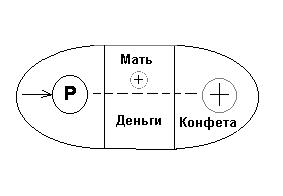
Между ребенком и матерью нарисована тонкая граница – в допущении, что ребенку нужно прийти домой, найти маму и попросить денег. Другая тонкая граница нарисована между матерью и конфетой, чтобы представить усилие, необходимое для возвращения в лавку и покупки. Ребенок движется к конфете, его путь – через мать.
Если мать отказывает ребенку в деньгах, он может подумать о том, не занять ли их у друзей. В этом случае регион, в котором находится мать, окружен непроницаемым барьером, и прокладывается новый путь к конфете – через регион, содержащий друзей:

Эта топологическая репрезентация может бесконечно усложняться появлением дополнительных регионов среды и границ разной степени прочности, а также дополнительных потребностей и соответствующих напряженных систем, валентностей, векторов» (С.312-313).
Вот некотрая сжатая сводка основных конструкций теории поля К. Левина. Ниже я буду дополнять и разъяснять по мере необходимости эту концепцию.
Но теперь мне хотелось бы обратиться к первым интерпретациям уже введенных понятий теории поля на конструктах модели «субъектных онтологий».
В рамках модели субъектных онтологий субъект рассматривается как единство онтологии, тела и y-функции. Онтология – множество некоторых положений дел. Тело – множество подположений дел, на основе которых субъект может непосредственно менять совокупное положение дел. Наконец, y-функция – это множество чисел от нуля до единицы, сопоставленных каждому положению дел и характеризующих интегральную меру благополучия субъекта в данном положении дел. Активность субъекта выражается в том, что он пытается так менять деятельностью своего тела положения дел, чтобы либо повышать степени себя, либо предотвращать их падения. В общем случае, это некоторая минимальная модель субъекта, которая может обогащаться рядом дополнительных параметров. Но об этих параметрах я позволю себе упоминать лишь по мере необходимости.
Интерпретируя теперь модель субъектных онтологий на конструктах теории поля, следует, во-первых, отметить, что в качестве положения дел можно в данном случае рассмотреть жизненное пространство вместе со всеми характерными параметрами (число, расположение регионов, проницаемость границ, текучесть-ригидность регионов, валентности, напряжения, силы, степени реальности, временная перспектива, и т. д.), влияющих на поведение субъекта. В этом случае онтология предстанет как некоторый класс жизненных пространств, тем или иным образом определенный. В качестве тела (телесности) субъекта будем рассматривать все те параметры жизненного пространства, значения которых могут быть непосредственно изменены субъектом. Это: положение региона Р в психологической среде, дифференцированность жизненного пространства. В первом случае активность субъекта выражается в локомоции, во втором – в произвольном переструктурировании жизненного пространства. При локомоции структурированность жизненного пространства, за исключением позиции региона Р, предполагается неизменной. Назовем множества жизненных пространств, отличных друг от друга только положением региона Р в рамках одной и той же в остальном структуры жизненного пространства, локомоционными универсумами (L-универсумами). При произвольном переструктурировании жизненного пространства субъект переходит от одного L-универсума к другому. Таким образом, пока все деятельности субъекта в теории поля можно разделить на два класса: 1) деятельность внутри одного L-универсума (локомоция), 2) деятельности между разными L-универсумами (произвольное переструктурирование жизненного пространства как своего рода металокомоция субъекта). Интересно, что сам Левин рассматривает в качестве деятельности субъекта только локомоцию, связывая только с ней структуру потребности. В общем случае следует говорить, по-видимому, о двух основных деятельностях субъекта – локомоции и металокомоции, и, если потребность связана с локомоцией, то почему бы ее не связать и с металокомоцией? Такую потребность можно соответственно называть метапотребностью.
Наконец, деятельность субъекта у Левина направлена в сторону снятия напряжения, и такое направление деятельности вполне коррелирует с повышением степеней себя в модели субъектных онтологий. В связи с этим можно предполагать, что напряжение (t) в теории поля вполне может быть сопоставлено с величиной степени не себя (1-y) субъекта, так что можно было бы записать: t = k(1-y), где k – коэффициент пропорциональности, некоторое неотрицательное число. Энергия высвобождается тогда, когда напряжение падает. Это похоже на переход потенциальной энергии («напряжения») в кинетическую в механических процессах. Поэтому далее я буду обозначать коэффициент k через Е, понимая под Е полную психическую энергию той потребности, с которой связано напряжение t. В этом случае под величиной Е(1-y)=t можно понимать аналог потенциальной энергии, под Еy - аналог кинетической энергии (то, что Левин обычно и называет термином «энергия»). По крайней мере, в рамках одной изолированной потребности выполняется закон сохранения полной психической энергии: как бы не менялась величина y, но всегда верно, что Еy + Е(1-y) = Е.
Итак, все основные конструкты теории субъектных онтологий вполне могут быть соотнесены с основными конструктами теории поля. Коснемся ниже иных понятий теории поля, в связи с предложенной базовой интерпретацией.
Под локомоцией теперь можно понимать всякое действие субъекта в рамках L-универсума, которое либо повышает степени себя (снижает напряжение), т. е. является (+)действием, либо предотвращает их падение, т. е. -(-)действие. В этом случае вхождение региона Р в регион психологической среды с положительной валентностью можно проинтерпретировать в модели субъектных онтологий как достижение такого положения дел в L-универсуме, где степень себя принимает максимальное значение 1 (и, соответственно, напряжение – как степень не себя - падает до нуля). Здесь следует заметить, что такое понятие теории поля, как «регион», предполагает выделение в структуре жизненного пространства некоторой части, которую можно называть подположением дел для жизненного пространства. Жизненное пространство – это общее положение дел, тот или иной регион – его подположение дел. Если регион устойчиво сохраняется на протяжении какого-то отрезка времени, то возникает понятие не просто мгновенно существующего региона, но региона во времени. Такой длящийся во времени регион можно представить как некоторое множество подположений дел, обладающих определенной эквивалентностью между собою. Такого рода образования я буду называть подонтологиями, относя сюда в том числе и множества положений дел. Так, например, регион психологической среды, содержащий валентность, регион Р – это примеры подонтологий. Первую подонтологию, выражающую валентность, я буду обозначать как V-онтологию. Вторую подонтологию, связанную с Р-регионом, - как Р-онтологию. Факт вхождения Р-региона в регион с положительной валентностью V теперь можно представить как достижение такого положения дел, которое обладает подположением дел, одновременно принадлежащим Р - и V-онтологиям.
Получается пока такая система соответствий между понятиями теории поля и понятиями теории субъектных онтологий.
Теория поля | Теория субъектных онтологий |
Поле | Субъектная онтология |
Жизненное пространство | Общее положение дел |
Регион | Подположение дел |
Напряжение (t) | Величина Е(1-y), где Е³0 и Е – полная психическая энергия |
Вхождение (локомоция) в регион с положительной валентностью или удаление от региона с отрицательной валентностью | Действие, снижающее Е(1-y), т. е. повышающее y |
Локомоция и произвольная переструктуризация жизненного пространства (металокомоция) | Деятельность субъекта как изменение параметров его тела (эфферентных органов) |
Особое место в системе понятий теории поля занимает понятие «силы». Пожалуй, это одно из наиболее проблематичных понятий в теории поля. Дело здесь состоит в том, что в общем случае описанная выше структура жизненного пространства не является областью линейного (векторного) пространства. Скорее структуру жизненного пространства можно представить как множество вершин направленного графа, где каждая вершина выражает тот или иной регион из L, а направленные ребра между вершинами символизируют границы между регионами, проходимые в направлении движения от одного региона к другому (в этом случае локомоция совершается по направленным ребрам графа). Такая структура называлась Левином «годологическим пространством» ( С.306). В этом случае направление силы – это не направление вектора в обычном понимании этого понятия в математике. С другой стороны, Левин всегда понимал силу как вектор. Различные силы можно складывать как вектора, для каждого вектора найдется противоположный ему вектор, в сумме с которым в результате получится нулевой вектор. Складывается впечатление, что Левин использовал интуицию векторного протранства сил, определенного над годологическим (невекторным) пространством. В то время, как в классической математике и физике векторное пространство сил всегда мыслится определенным над векторным же пространством состояний, на которые действуют эти силы. Такая специфика понятия силы и составила, по-видимому, ту основную трудность, которая не позволила Левину предложить строгое выражение конструкта «силы» в теории поля. Точно та же трудность определения силы (воли) возникает и в теории субъектных онтологий – для тех случаев, когда онтологии не являются векторными пространствами. Ниже я предлагаю вариант формального построения некоторого нового типа объектов, которые, по моему мнению, как раз способны удовлетворить требованиям векторных объектов над в том числе невекторными структурами.
2. Исчисление обобщенных градиентов: основные идеи
Какова бы ни была онтология U в субъектной онтологии S = <U, B,y>, на ней в любом случае определено y-поле и Еy-поле, где Е – аналог полной энергии в S. Связать определение воли в субъектной онтологии S с Еy-полем – вот основная идея, которая будет использоваться мной ниже. Пусть субъект находится в некоторый момент времени в положении дел u. Допустим, что активность субъекта определяется в этом случае его Еy-полем, определенном на некотором множестве А, включающем в себя положение дел u. Это определение можно представить себе в следующем общем виде: субъект стремится изменить положение дел u до такого положения дел u+ из А, что величина Еy принимает свое максимальное на А значение в u+ (точнее, правда, с математической точки зрения следует говорить не о максимуме, а о супремуме функции Еy на множестве А, но я пока для простоты буду говорить о максимуме). Так как величина Е неотрицательна, то максимум функции Еy принимается в той же точке, что и максимум функции y (для случая функции-константы Еy примем то соглашение, что точка u+ совпадает с u. В самом деле, в этом случае субъекту безразлично, как менять положение дел u, везде будет одна и та же величина Еy, и на основании только своих внутренних побуждений он останется на месте). Рассмотрим пару (u, u+) как указатель направления от положения дел u до положения дел u+. Так мы можем подойти на один шаг к некоторому направленному объекту, напоминающему вектор. Однако, у вектора, кроме направления, есть еще и величина. Какое число могло бы в нашем случае играть роль величины вектора для направления (u, u+)? Здесь нас вновь может выручить Еy-поле, заданное на множестве А. В положении дел u и u+ Еy-функция принимает значения Еy(u) и Еy(u+) = Еy+ соответственно. Так как Еy+ - это максимум значений Еy-функции на множестве А, то Еy+ ³ Еy(u). Чем больше перепад значений Еy-функции в текущем и финальном положениях дел, тем больше сила стремления субъекта к финальному положению. Так в качестве величины направления (u, u+) можно рассмотреть неотрицательное число Еy+ - Еy(u). Это второй шаг для определения вектора, связанного с направлением (u, u+). Итак, введем некоторый комплексный объект, который бы в своем обозначении отразил текущее положение дел u, финальное положение дел u+, и Еy-функцию на множестве А. Рассматривая такие объекты на одном множестве А, мы можем явно не обозначать это множество в каждом отдельном таком объекте. Тогда этот объект можно было бы попытаться определить как тройку (Еy, u, u+) – из функции Еy, определенной на множестве А, текущего положения дел u и финального положения дел u+, где Еy-функция дает максимальное значение на А (если таких финальных положений дел несколько, то выберем любое из них и будем считать, что для каждой функции вида Еy+С, где С – вещественное число, такое единственное финальное положение дел зафиксировано. В этом смысле описываюмую ниже алгебру следует понимать как однозначную с точностью до таких фиксаций единственных финальных положений дел). Здесь указано и направление (u, u+), и всегда можно определить величину Еy+ - Еy(u), зная функцию Еy на множестве А. Итак, имея любую онтологию U, мы можем построить некоторый объект (Еy, u, u+), который обладает направлением и величиной. Но будет ли этот объект вектором? Вот это и есть самая важная часть задачи – этот объект нужно подобрать так, и операции на нем задать таким образом, чтобы множество таких объектов могло образовать векторное пространство. Будем рассматривать множество таких объектов при фиксированном множестве А, фиксированном начальном положении дел u. Так как определение u+ при этих условиях зависит от Еy-функции, то в качестве единственного варьирующего параметра при образовании множества троек вида (Еy, u, u+) может быть только Еy-функция. Следовательно, два разных объекта – это (Е1y1, u, u1+) и (Е2y2, u, u2+), где разнятся функции Е1y1 и Е2y2, определенные на множестве А. Но всякую ли такую разницу следует принимать во внимание? Ответ на этот вопрос во многом будет зависеть от результатов попытки проверить свойства линейного (векторного) пространства для множества подобных объектов. Одна из первых задач, которая должна быть здесь прояснена, - это проблема противоположного элемента (поскольку для любого вектора в векторном пространстве всегда может быть определен противоположный элемент, в сумме с которым первый элемент даст ноль). Проблема противоположного элемента оказывается тесно связанной таким образом с проблемами операции суммирования векторов, определения нулевого вектора. А поскольку для векторов задаются две основные операции – сложение и умножение на число, то проблема противоположного элемента оказывается связанной также и с операцией умножения на число – противоположный вектор получается обычно из данного умножением последнего на число –1. Попытка прямо применить это правило к объекту (Еy, u, u+) терпит фиаско. В самом деле, так как различие подобных элементов определяется различием Еy-функций (первого элемента тройки), то домножение на число –1 для объекта (Еy, u, u+) вполне логично было бы понимать как в первую очередь домножение на –1 первого элемента тройки, т. е. Еy-функции (это относится и к общему случаю умножения на любое вещественное число). Однако, все операции над Еy-функциями не должны выводить из их множества, т. е. должны сохраняться те условия, что Е ³ 0 и y Î[0,1] (условие позитивности). Если же мы умножим Еy-функцию на –1, то мы уже не получим функцию, выполняющую условие позитивности. В то же время можно заметить, что функция - y дала бы максимум в той же точке, что и функция 1-y. Так возникает предположение понимать умножение на –1 как переход от объекта (Еy, u, u+) к объекту (Е(1-y), u, v+), где v+ - то положение дел, на котором дает максимум функция Е(1-y). Теперь встает проблема сложения элемента (Еy, u, u+) и противоположного (?) ему элемента (Е(1-y), u, v+). Такое сложение вновь должно касаться в первую очередь первых элементов троек. Тогда, складывая некоторой операцией Å («сумма») функции Еy и Е(1-y) мы должны получить некоторую функцию Еy Å Е(1-y) = Е*y*, которая могла бы сыграть роль нуля. Используя тот смысл, который вкладывается в объект (Еy, u, u+) – смысл вектора воли, устремляющего субъекта от исходного положения дел к наиболее благоприятному в некотором малом мире А – можно было бы предполагать в качестве нулевого элемента здесь такой, который выражает нулевую волю, безразличие субъекта. Как уже упоминалось выше, такой волей могла бы быть воля в плоском Еy-поле, т. е. таком y-поле, которое на всех положениях дел из А дает одну и ту же величину. Тогда финал совпадает с исходом, тогда воля равна нулю. Следовательно, результатом сложения Еy Å Е(1-y) = Е*y* должно быть плоское y*-поле. Однако, какое именно? Ведь все плоские Еy-поля одинаково будут давать нулевую волю – у всех объектов (Еy, u, u) с плоским Еy-полем будет одно направление (u, u) и одна величина, равная нулю. Если же будут даны два плоские поля Еy и Е*y*, то всегда возможно представление Е*y* = Еy + С, где С – вещественное число. Теперь эта идея вполне может быть увидена как общая. Если даны две, уже не обязательно плоские, функции Еy и Е*y*, такие, что Е*y* = Еy + С, то объекты (Еy, u, u+) и (Е*y*, u, u+) будут иметь одно направление (u, u+) и одну величину Еy+ - Еy(u), т. к. ![]() {Еy(x) + С}=
{Еy(x) + С}= ![]() {Еy(x)}+ C. Если вектора имеют одну величину и направление, то они считаются равными. Так мы приходим к идее эквивалентности по сдвигам на объектах вида (Еy, u, u+): два объекта (Еy, u, u+) и (Е*y*, u, v+) будем считать эквивалентными по сдвигам, и писать (Еy, u, u+) » (Е*y*, u, v+), если найдется такое число С, что Е*y* = Еy + С. Можно проверить, что это в самом деле отношение эквивалентности, и «прорядить» множество объектов вида (Еy, u, u+) до множества классов эквивалентности на таких объектах, не различая эквивалентные объекты. Класс эквивалентности, которому принадлежит элемент (Еy, u, u+), я буду обозначать как (Еy, u, u+)#.
{Еy(x)}+ C. Если вектора имеют одну величину и направление, то они считаются равными. Так мы приходим к идее эквивалентности по сдвигам на объектах вида (Еy, u, u+): два объекта (Еy, u, u+) и (Е*y*, u, v+) будем считать эквивалентными по сдвигам, и писать (Еy, u, u+) » (Е*y*, u, v+), если найдется такое число С, что Е*y* = Еy + С. Можно проверить, что это в самом деле отношение эквивалентности, и «прорядить» множество объектов вида (Еy, u, u+) до множества классов эквивалентности на таких объектах, не различая эквивалентные объекты. Класс эквивалентности, которому принадлежит элемент (Еy, u, u+), я буду обозначать как (Еy, u, u+)#.
При описанных выше конструкциях возникает, однако, следующая проблема. Величина вектора (Еy, u, u+)# совсем не обязательно будет равна величине противоположного ему вектора, если последний понимать как (Е(1-y), u, v+)#. В то же время интуиция противоположного вектора предполагает, что этот вектор имеет равную величину с исходным и только противоположное направление. Кроме того, направления (u, u+) и (u, v+) могут быть совсем не противоположными с некоторой наивной точки зрения. Например, структуру жизненного пространства К. Левин обычно рассматривает на плоскости, т. е. в рамках двумерного векторного пространства (которое можно рассматривать в данном случае как выражение «наивной» точки зрения). И в рамках этого пространства Левин всегда рисует направление противоположного вектора как именно противоположное направление с точки зрения плоскости. В то же время совсем не очевидно, что для такого направления найдется соответствующий регион в рамках жизненного пространства. Такая ситуация привела меня к мысли о возможности обеспечения противоположного направления в любом случае, независимо от структуры онтологии. Но что делать, если такое противоположное направление не обеспечено никаким имеющимся в онтологии (множестве А) положением дел. Тогда я поступил примерно так же, как и в случае с мнимыми числами. Я предположил, что для всякого направления (u, v) всегда может быть определено противоположное направление – (u, v) = (u, - v), где положение дел –v может не быть реальным положением дел из множества А, являясь в этом случае некоторым «мнимым» положением дел, представляемым субъектом как антипод положения дел v (в этом случае антиподы лежат в ирреальных уровнях жизненного пространства). Направления (u, - v) можно представить как сдвиг направления (v, u) в положение дел u как свое начало. При таком сдвиге v переходит в u, а u переходит в антипод v, т. е. в –v:
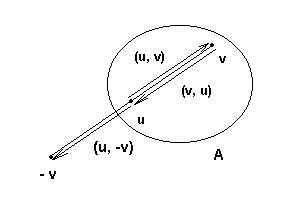
Теперь можно было определить противоположный элемент для (Еy, u, u+)# как (Е(1-y), u, - u+)#, где - u+ - это антипод для положения дел u+, предполагая, что величина элемента (Е(1-y), u, - u+)# та же самая, что и элемента (Еy, u, u+)#. Замечу, что такой подход находит также свое хорошее обоснование в методике использования противоположных сил в теории поля К. Левина. Например, силу, направленную от региона А к региону В, Левин обычно обозначает как fА, В. Такое задание силы предполагает, что определены оба указанных региона. Что же касается противоположной силы для силы fА, В, то ее Левин обозначает как fА,-В, причем, не всегда бывает ясно, что такое –В. Может оказаться, что ни одному реальному региону в психологической среде нельзя будет придать строгого смысла региона, лежащего в противоположном направлении к региону В относительно региона А. И, тем не менее, и в таких случаях Левин использует обозначение –В, считая, что идея противоположного направления предположена и здесь. С точки зрения понятия антипода мы теперь можем объяснить регион –В как антипод региона В, который совсем не всегда может быть обеспечен в структуре жизненного пространства некоторым реальным регионом, но по крайней мере всегда может выполнить функцию виртуального обозначения пространственно противоположного направления. Еще один интересный момент – изображение сил Левином как векторов, приложенных своим концом, а не началом, к Р-региону. Замечательно, что именно таковы будут те реальные направления (v, u), сдвигом которых в точку u будет образовываться антиподное направление (u, - v). Поэтому такое изображение точки приложения сил у Левина можно интерпретировать как его интуитивное желание опереться на реальное основание тех сил fА,-В, направления которых не могут быть представлены через реальные регионы. Таким реальным основанием является именно сила fВ, А, направленная извне к региону А, а так как в регионе А находится в данный момент Р-регион, то, следовательно, направленная извне и к Р-региону.
Антиподное понимание противоположного элемента приводит к относительно независимой роли в тройке (Еy, u, ±u+)# и третьего элемента: этот элемент уже не вполне оказывается выводим только из первого элемента, что необходимо учесть в определении операции сложения. Кроме того, возникает следующая проблема: хотя элемент (Е(1-y), u, - u+)# отличается нами от элемента (Е(1-y), u, v+)#, где 1-y(v+) = ![]() {1-y(x)}, но с точки зрения эквивалентности по сдвигам (») эти два элемента равны. Таким образом, появление антиподов приводит к необходимости более тонкого различения элементов, чем это возможно в рамках эквивалентности по сдвигам. И это более тонкое различение должно учитывать соотношение не только первых, но и третьих элементов троек. Оставляя отождествление в рамках эквивалентности по сдвигам, мы должны несколько разнообразить его, дополнив равенством третьих элементов троек. Так возникла идея второй эквивалентности – эквивалентности по направлениям (т. к. третьи элементы указывают направления). И вообще, учет антиподных направлений приводит к целому классу новых отношений. Так как антиподное направление (u, - v) для направления (u, v) понимается как пространственно (а не только психологически) противоположное направление, то вполне логично предположить, что единство направлений (u, v) и (u, - v) образуют как бы некоторую прямую, проходящую в обе стороны из точки u. Элементы, направления которых лежат на этой прямой, естественно было бы назвать параллельными. Если же к тому же учитывать не только соотношение направлений, но еще и сдвиговую (глобальную, по всей области определения А) эквивалентность, то такие параллельные элементы можно было бы назвать сильно параллельными. Аналогично можно определить понятия сонаправленности – противонаправленности элементов, вновь предполагая возможность совмещения этих определений со сдвиговой инвариантностью (сильная сонаправленность - противонаправленность). И вот теперь, учитывая эквивалентность не только первых, но и равенство третьих элементов, мы получим выражение эквивалентности по направлениям как сильной сонаправленности элементов. Эта эквивалентность, как я уже говорил, более чувствительная, чем сдвиговая эквивалентность. Каждый класс эквивалентности (Е(1-y), u, - u+)# разобъется отношением сильной сонаправленности на два подкласса – подкласс, содержащий элемент (Е(1-y), u, - u+), и подкласс с элементом (Е(1-y), u, v+). Такие новые классы эквивалентности я обозначаю двумя индексами «##» вверху справа у элемента: (Е(1-y), u, ±u+)##, а отношение сильной сонаправленности – через три стрелки . Два объекта (Еy, u, ±u+) и (Е*y*, u, ±v+) будем считать сильно сонаправленными, и писать (Еy, u, u+) (Е*y*, u, v+), если (Еy, u, u+) » (Е*y*, u, v+), и, кроме того, ±u+ = ±v+.
{1-y(x)}, но с точки зрения эквивалентности по сдвигам (») эти два элемента равны. Таким образом, появление антиподов приводит к необходимости более тонкого различения элементов, чем это возможно в рамках эквивалентности по сдвигам. И это более тонкое различение должно учитывать соотношение не только первых, но и третьих элементов троек. Оставляя отождествление в рамках эквивалентности по сдвигам, мы должны несколько разнообразить его, дополнив равенством третьих элементов троек. Так возникла идея второй эквивалентности – эквивалентности по направлениям (т. к. третьи элементы указывают направления). И вообще, учет антиподных направлений приводит к целому классу новых отношений. Так как антиподное направление (u, - v) для направления (u, v) понимается как пространственно (а не только психологически) противоположное направление, то вполне логично предположить, что единство направлений (u, v) и (u, - v) образуют как бы некоторую прямую, проходящую в обе стороны из точки u. Элементы, направления которых лежат на этой прямой, естественно было бы назвать параллельными. Если же к тому же учитывать не только соотношение направлений, но еще и сдвиговую (глобальную, по всей области определения А) эквивалентность, то такие параллельные элементы можно было бы назвать сильно параллельными. Аналогично можно определить понятия сонаправленности – противонаправленности элементов, вновь предполагая возможность совмещения этих определений со сдвиговой инвариантностью (сильная сонаправленность - противонаправленность). И вот теперь, учитывая эквивалентность не только первых, но и равенство третьих элементов, мы получим выражение эквивалентности по направлениям как сильной сонаправленности элементов. Эта эквивалентность, как я уже говорил, более чувствительная, чем сдвиговая эквивалентность. Каждый класс эквивалентности (Е(1-y), u, - u+)# разобъется отношением сильной сонаправленности на два подкласса – подкласс, содержащий элемент (Е(1-y), u, - u+), и подкласс с элементом (Е(1-y), u, v+). Такие новые классы эквивалентности я обозначаю двумя индексами «##» вверху справа у элемента: (Е(1-y), u, ±u+)##, а отношение сильной сонаправленности – через три стрелки . Два объекта (Еy, u, ±u+) и (Е*y*, u, ±v+) будем считать сильно сонаправленными, и писать (Еy, u, u+) (Е*y*, u, v+), если (Еy, u, u+) » (Е*y*, u, v+), и, кроме того, ±u+ = ±v+.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
