

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1.4.1. Центр инерции
Рассмотрим систему материальных точек (рис. 1.4.1). Точка с координатами  называется центром инерции или центром масс этой системы.
называется центром инерции или центром масс этой системы.
Если надо найти центр инерции твёрдого тела (рис. 1.4.2), то это тело надо разбить на бесконечно малые объемы dV массой dm и заменить суммирование интегрированием:
1.4.2. Основное уравнение динамики вращательного движения абсолютно твердого тела
Рассмотрим материальную точку массой m, которая находится в точке пространства с радиус-вектором ![]() (рис.1.4.3), движущуюся со скоростью
(рис.1.4.3), движущуюся со скоростью  . Её импульс
. Её импульс ![]() . Пусть на это тело действует сила
. Пусть на это тело действует сила ![]() .
.
Введем понятия: момент силы относительно точки O: ![]() и момент импульса относительно точки O:
и момент импульса относительно точки O: ![]() . На рис. 1.4.3 вектора
. На рис. 1.4.3 вектора ![]() и
и ![]() направлены перпендикулярно поверхности рисунка в сторону от читателя.
направлены перпендикулярно поверхности рисунка в сторону от читателя.
Если взять производную от момента импульса по времени:

С учётом, что![]()
![]() , получаем
, получаем ![]() . По второму закону Ньютона
. По второму закону Ньютона  , поэтому получаем:
, поэтому получаем:  . Это уравнение носит название основного уравнения вращательного движения. Оно выполняется как для одной материальной точки, так и для любого абсолютно твёрдого тела, поскольку такое тело можно считать состоящим из многих материальных точек.
. Это уравнение носит название основного уравнения вращательного движения. Оно выполняется как для одной материальной точки, так и для любого абсолютно твёрдого тела, поскольку такое тело можно считать состоящим из многих материальных точек.
Моментом импульса тела относительно какой-либо оси называется проекция момента импульса относительно какой-либо точки указанной оси на эту ось.
1.4.2. Момент инерции твердого тела
Пусть тело A массой m движется по окружности радиуса R (рис. 1.4.4) с линейной скоростью ![]() . Момент импульса этого тела
. Момент импульса этого тела  , где
, где ![]() – угловая скорость движения тела A по окружности. Если радиус окружности не меняется, то и величина I=mR2 тоже не меняется. Следовательно,
– угловая скорость движения тела A по окружности. Если радиус окружности не меняется, то и величина I=mR2 тоже не меняется. Следовательно,  , где
, где ![]() – угловое ускорение. Видно, что получающиеся формулы очень похожи на выражения для импульса и для второго закона Ньютона соответственно, только вместо линейной скорости и ускорения используются угловые скорость и ускорение, а вместо массы – величина I=mR2, именуемая моментом инерции материальной точки.
– угловое ускорение. Видно, что получающиеся формулы очень похожи на выражения для импульса и для второго закона Ньютона соответственно, только вместо линейной скорости и ускорения используются угловые скорость и ускорение, а вместо массы – величина I=mR2, именуемая моментом инерции материальной точки.
Если тело нельзя считать материальной точкой, но можно считать абсолютно твердым, то его момент инерции можно считать суммой моментов инерции бесконечно малых его частей, поскольку угловые скорости вращения этих частей одинаковы (рис. 1.4.5). Сумма бесконечно малых – интеграл:
![]()
Для любого тела существуют оси, проходящие через его центр инерции, обладающие таким свойством: при вращении тела вокруг таких осей в отсутствии внешних воздействий оси вращения не меняют своего положения. Такие оси называются свободными осями тела. Можно доказать, что для тела любой формы и с любым распределением плотности существуют три взаимно перпендикулярные свободные оси, именуемые главными осями инерции тела (рис. 1.4.6). Моменты инерции тела относительно главных осей именуются главными моментами инерции тела.
Главные моменты инерции некоторых тел:
1.4.3. Теорема Гюйгенса-Штейнера.
Момент инерции тела относительно оси, проходящей через точку O и перпендикулярной плоскости рис. 1.4.7 ![]() . Поскольку
. Поскольку ![]() ,
, ![]() . Отсюда
. Отсюда ![]() . Поскольку для всех микрообъёмов
. Поскольку для всех микрообъёмов  , то
, то ![]() . Заметим, что, во-первых,
. Заметим, что, во-первых, ![]() ; во-вторых,
; во-вторых, ![]() , поскольку это координаты момента инерции тела в системе отсчёта, связанной с этим телом; и, в-третьих,
, поскольку это координаты момента инерции тела в системе отсчёта, связанной с этим телом; и, в-третьих,  – моменту инерции тела относительно оси, проходящей через центр масс и параллельной заданной оси. Итого получаем:
– моменту инерции тела относительно оси, проходящей через центр масс и параллельной заданной оси. Итого получаем:
![]() .
.
Это выражение носит название теоремы Гюйгенса-Штейнера: момент инерции тела относительно произвольной оси равен сумме моменту инерции тела относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы тела на квадрат расстояния между осями.
1.5. Законы сохранения и изменения импульса и момента импульса в механике.
1.5.1. Системы тел.
Любой набор тел именуется системой тел. Если на тела, входящие в систему, не действуют другие тела, не входящие в эту систему (или действие других тел на каждое тело скомпенсировано), то такая система тел называется замкнутой (закрытой, изолированной). Если действие других тел на тела, входящие в систему, не скомпенсировано, то такая система тел называется незамкнутой (открытой, неизолированной).
Система может состоять из одного тела.
1.5.2. Импульс материальной точки и системы материальных точек.
Как было сказано ранее, импульсом материальной точки называется произведение её массы на скорость:  . Для системы из N материальных точек импульс системы равен сумме импульсов материальных точек, входящих в эту систему
. Для системы из N материальных точек импульс системы равен сумме импульсов материальных точек, входящих в эту систему  . Тело, которое нельзя считать материальной точкой, можно разделить на бесконечно малые объёмы и, перейдя от суммированию к интегрированию, получить:
. Тело, которое нельзя считать материальной точкой, можно разделить на бесконечно малые объёмы и, перейдя от суммированию к интегрированию, получить:  .
.
Поскольку радиус-вектор центра масс любого тела  , то
, то ![]() . Взяв производную по времени от обеих частей этого равенства, получаем
. Взяв производную по времени от обеих частей этого равенства, получаем  . То есть,
. То есть, ![]() – импульс тела есть произведение массы тела на скорость движения центра масс. Таким образом, тело ведет себя как материальная точка, обладающая всей массой этого тела и находящаяся в центре масс.
– импульс тела есть произведение массы тела на скорость движения центра масс. Таким образом, тело ведет себя как материальная точка, обладающая всей массой этого тела и находящаяся в центре масс.
1.5.3. Закон сохранения и изменения импульса материальной точки и системы материальных точек.
Рассмотрим замкнутую систему тел – материальных точек (рис. 1.5.1). Поскольку для каждой силы ![]() (i – номер тела, на которое действует сила, j – номер тела, со стороны которого действует сила) существует
(i – номер тела, на которое действует сила, j – номер тела, со стороны которого действует сила) существует  , то
, то ![]() . Таким образом, сумма всех сил, действующих в замкнутой системе тел, равна нулю.
. Таким образом, сумма всех сил, действующих в замкнутой системе тел, равна нулю.
По второму закону Ньютона  . Отсюда
. Отсюда  и, следовательно,
и, следовательно, ![]() – суммарный импульс всех тел, входящих в замкнутую систему есть величина неизменная. Это выражает закон сохранения импульса. Этот закон действует только в инерциальных системах отсчёта.
– суммарный импульс всех тел, входящих в замкнутую систему есть величина неизменная. Это выражает закон сохранения импульса. Этот закон действует только в инерциальных системах отсчёта.
Как было показано ранее, координаты центра инерции . Если считать массы тел неизменными, то можно взять производную  . Из закона сохранения импульса получаем, что в инерциальной системе отсчёта скорость движения центра масс замкнутой системы тел неизменна вне зависимости от внутренних сил взаимодействия. А из этого следует, что система отсчёта, связанная с центром масс замкнутой системы тел является инерциальной.
. Из закона сохранения импульса получаем, что в инерциальной системе отсчёта скорость движения центра масс замкнутой системы тел неизменна вне зависимости от внутренних сил взаимодействия. А из этого следует, что система отсчёта, связанная с центром масс замкнутой системы тел является инерциальной.
Если система тел незамкнутая, то, кроме внутренних сил ![]() , действуют ещё и внешние силы
, действуют ещё и внешние силы ![]() со стороны тел, не входящих в систему (рис. 1.5.2). В этом случае полная сумма всех сил
со стороны тел, не входящих в систему (рис. 1.5.2). В этом случае полная сумма всех сил ![]() .
.
1.5.4. Движение тел переменной массы
Представим себе ракету массой M, летящую равномерно и прямолинейно со скоростью ![]() до момента времени t (изображение (1) на рис. 1.5.1). В момент t включается двигатель и за время Δt ракета приобретает дополнительную скорость
до момента времени t (изображение (1) на рис. 1.5.1). В момент t включается двигатель и за время Δt ракета приобретает дополнительную скорость ![]() (изображение (2) на рис. 1.5.3). Поскольку скорость ракеты изменяется, можно сказать, что на ракету действовала так называемая реактивная сила. Заметим, что за это время масса ракеты уменьшилась на ΔM за счет вылета горючих газов.
(изображение (2) на рис. 1.5.3). Поскольку скорость ракеты изменяется, можно сказать, что на ракету действовала так называемая реактивная сила. Заметим, что за это время масса ракеты уменьшилась на ΔM за счет вылета горючих газов.
При этом на ракету могут действовать и иные силы (например, сила сопротивления атмосферы), которые на рис. 1.5.3 не показаны и равнодействующая которых равна ![]() .
.  , а
, а  . Пусть из ракеты вылетают газы с постоянной скоростью u м/с относительно ракеты в количестве m кг/с. То есть
. Пусть из ракеты вылетают газы с постоянной скоростью u м/с относительно ракеты в количестве m кг/с. То есть  .
.
Рассмотрим систему отсчёта, движущуюся со скоростью ракеты в данный момент времени. В этом случае p = 0.
Если промежуток времени устремить к нулю, то перейдём к дифференциалам. В проекции на ось x dp = -m × dt × u + mdv, откуда ![]() ‑mu + m
‑mu + m![]() . Отсюда получаем
. Отсюда получаем  – уравнение Мещерского. Величина
– уравнение Мещерского. Величина ![]() – реактивная сила, действующая на тело переменной массы.
– реактивная сила, действующая на тело переменной массы.
Если внешних сил нет, то ‑u![]() . При начальной скорости ракеты равной нулю
. При начальной скорости ракеты равной нулю ![]() . Отсюда
. Отсюда ![]() .
.
 начальная масса ракеты.
начальная масса ракеты.
 – формула Циолковского.
– формула Циолковского.
Таким образом,  – максимальная скорость ракеты, где
– максимальная скорость ракеты, где ![]() - масса топлива + масса окислителя.
- масса топлива + масса окислителя.
1.5.5. Закон сохранения момента импульса.
Закон сохранения импульса: для замкнутой системы  . Рассмотрим два взаимодействующих тела (рис. 1.5.4).
. Рассмотрим два взаимодействующих тела (рис. 1.5.4).


Введем характеристику – момент импульса тела относительно точки 0.



То есть
![]() - закон сохранения момента импульса
- закон сохранения момента импульса
Если через точку 0 провести произвольную ось, то момент импульса тела (системы тел) относительно этой оси будет равен проекции момента импульса тела (системы тел) относительно точки 0 на эту ось.
Величина
 - момент силы F относительно точки.
- момент силы F относительно точки.
Момент силы относительно оси – аналогично моменту импульса.
Для всех внутренних сил
Т. о. получаем
 - основное уравнение динамики вращ. дв-я – аналог 2-го закона Ньютона.
- основное уравнение динамики вращ. дв-я – аналог 2-го закона Ньютона.
Под действием ![]() за время dt гироскоп получает приращение момента импульса.
за время dt гироскоп получает приращение момента импульса.
 - то есть ось вращения гироскопа стала вращаться с угловой скоростью
- то есть ось вращения гироскопа стала вращаться с угловой скоростью ![]() вокруг горизонтальной оси О – прецессия.
вокруг горизонтальной оси О – прецессия.
угловая скорость прецессии не зависит от угла между ![]() и
и ![]()
1.6. Работа и мощность в механике.
Лекция 6.
Работа и мощность в механике.
1.6.1. Работа и мощность силы и момента сил.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
; ![]() ;
;
1.6.2. Механическая работа и потенциальная энергия.
1.6.3. Консервативные и диссипативные силы.
Поле, работа которого над телом по замкнутому пути равна нулю, называется потенциальным.
Силы, работа которых не зависит от формы пути, а зависит от начального и конечного положения тела, называются консервативными. А если зависит, то силы называются неконсервативными. Если работа какой-либо неконсервативной силы всегда меньше или равна нулю, то такая сила называется диссипативной.
1.6.4. Работа сил потенциального поля на конечном перемещении и на замкнутом пути.
![]() ;
;
![]() ;
;
1.6.5. Связь между потенциальной энергией и силой.
![]()
1.7. Законы сохранения и превращения энергии.
Лекция 7.
Законы сохранения и превращения энергии.
1.7.1. Кинематическая, потенциальная и полная энергия механической системы.
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Кинетическая энергия есть количественная мера поступательного движения тела.
Потенциальная энергия – способность тела совершать работу за счет изменения своего положения относительно тел, взаимодействующих с ним.
Работа консервативных сил при перемещении материальной точки (тела) равна убыли потенциальной энергии.
![]() - полная механическая энергия.
- полная механическая энергия.
1.7.2. Закон сохранения и превращения энергии.
![]()
В замкнутой системе, или в системе, в которой действуют только консервативные силы, полная механическая энергия сохраняется.
1.7.3. Абсолютно упругий и неупругий удары.
Удар называется абсолютно упругим, если нет изменения энергии после удара системы двух тел.
При абсолютно упругом ударе выполняются законы сохранения импульса и энергии.
При абсолютно неупругом ударе, тела после удара движутся с одинаковой скоростью и перемещаются как одно целое.
При абсолютно неупругом ударе имеет место потеря энергии.
1.7.4. Работа и энергия при вращательном движении
![]() ;
;
I – момент инерции тела;
w – угловая скорость;
![]() ;
;
Mz – момент силы относительно оси;
![]() - угловое перемещение;
- угловое перемещение;
1.7.5. Плоское движение. Кинетическая энергия при плоском движении.
Плоское движение – это такое движение, при котором все точки твердого тела движется в плоскостях, параллельных некоторой плоскости неподвижной в данной системе отсчета.
![]() ;
;
vc – скорость центра масс; Ic – момент инерции относительно центра масс;
Раздел 2. Механические колебания /1а, 1б, 2б, 3б/
2.1. Свободные механические колебания.
Введение. Виды колебаний
Колебательное движение (колебание) – это изменение состояния вещества или поля, характеризуемое повторяемостью во времени определенной физической величины x.
Виды колебаний:
§ Периодические (гармонические и негармонические) и непериодические.
§ собственные, затухающие, вынужденные, параметрические и автоколебания.
§ Механические, электромагнитные и др.
2.1.1.Линейный гармонический осциллятор
Колебательная система, совершающая собственные колебания по гармоническому закону
![]() (2.1.1)
(2.1.1)
называется линейным гармоническим осциллятором (ЛГО).
Примеры ЛГО
1. Пружинный маятник – материальная точка массой m, подвешенная на пружине жесткостью k.
2. Физический маятник – абсолютно твердое тело, способное совершать колебания вокруг неподвижной точки, не совпадающей с его центром инерции.
3. Математический маятник – материальная точка, подвешенная на невесомой и нерастяжимой нити длиной ![]() .
.
2.1.2.Энергетика ЛГО
Движение в любой потенциальной яме ![]() есть колебательное движение (рис. 2.1.1).
есть колебательное движение (рис. 2.1.1).
Рис. 2.1.1. Колебательное движение в потенциальной яме
Если на механическую систему (например, пружинный маятник), находящуюся в состоянии устойчивого равновесия, действует внешняя сила ![]() , то возникает градиент потенциальной энергии и, как следствие, – внутренняя сила
, то возникает градиент потенциальной энергии и, как следствие, – внутренняя сила ![]() :
:
![]() , (2.1.2)
, (2.1.2)
которая возвращает систему в положение устойчивого равновесия. Таким образом, в системе возникают колебания.
Движение в любой потенциальной яме может быть аппроксимировано движением в параболической потенциальной яме, если рассматривать лишь малые отклонения (смещения) от положения равновесия.
движение в параболической потенциальной яме (ЕР ~ x2) приводит к гармоническим колебаниям.
2.1.2.1.Пружинный маятник
Закон сохранения и превращения энергии колебаний пружинного маятника (рис. 2.1.2):
ЕРmax = ЕР + EK = EKmax, (2.1.3)
где ЕРmax и EKmax – амплитудные значения потенциальной и кинетической энергий, соответственно.
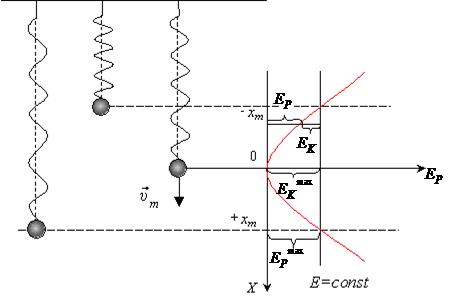
Рис. 2.1.2. Энергетика колебаний пружинного маятника
При малых отклонениях от положения равновесия изменением потенциальной энергии материальной точки в однородном поле тяготения можно пренебречь.
Рассмотрим превращение энергии за половину периода колебания:
 ,(2.1.4)
,(2.1.4)
где ![]() , x – мгновенное значение отклонение маятника от положения равновесия, а xm – максимальное значение этого отклонения.
, x – мгновенное значение отклонение маятника от положения равновесия, а xm – максимальное значение этого отклонения.
Отсюда
![]() .
.
После разделения переменных и интегрирования получаем:
 ,
,
откуда
![]() .(2.1.5)
.(2.1.5)
Если в начальный момент времени t = 0 смещение x0 = ![]() , то
, то ![]() и решение интегрального уравнения имеет вид:
и решение интегрального уравнения имеет вид:
![]() .(2.1.6)
.(2.1.6)
Амплитуда ![]() определяется начальным запасом энергии и не зависит от параметров колебательной системы.
определяется начальным запасом энергии и не зависит от параметров колебательной системы.
Собственная циклическая (круговая) частота ![]() зависит от параметров колебательной системы:
зависит от параметров колебательной системы:
![]() .(2.1.7)
.(2.1.7)
Период собственных колебаний: T0.
Линейная частота: n0.
Фаза колебания: Ф = w0t определяет значение смещения х в данный момент времени.
Если в момент времени t = 0 смещение ![]() , то фаза колебания
, то фаза колебания
Ф = w0t + j,(2.1.8)
где j – начальная фаза колебания.
уравнение гармонических колебаний пружинного маятника:
 .(2.1.9)
.(2.1.9)
2.1.2.2.Физический маятник
Закон сохранения и превращения энергии колебаний физического маятника (рис. 2.1.3):
 |
Рис. 2.1.3. Физический маятник: О – точка подвеса, С – центр инерции
Рассмотрим превращение энергии за половину периода колебания:
ЕР m = ЕР + EK = EK m.
![]() ,(2.1.10)
,(2.1.10)
где ![]() – угловая скорость,
– угловая скорость,
Á – момент инерции маятника относительно т. О,
h – высота, на которую поднимается центр инерции (т.С), определяется по формуле:
![]() ,(2.1.11)
,(2.1.11)
здесь  – длина физического маятника, а
– длина физического маятника, а ![]() - максимальная высота подъема центра инерции..
- максимальная высота подъема центра инерции..
При малых q sinq » q (в радианах) и тогда
![]() .
.
Поэтому
![]() и
и ![]() ,(2.1.12)
,(2.1.12)
где ![]() - мгновенное значение угла отклонения маятника от положения равновесия, а
- мгновенное значение угла отклонения маятника от положения равновесия, а ![]() - максимальное значение этого угла..
- максимальное значение этого угла..
Тогда закон сохранения и превращения энергии может быть записан в виде:
 .(2.1.13)
.(2.1.13)
После разделения переменных и интегрирования (по аналогии с выводом для пружинного маятника) получим уравнение гармонических колебаний физического маятника:
![]() .(2.1.14)
.(2.1.14)
Амплитуда ![]() определяется начальным запасом энергии и не зависит от параметров колебательной системы.
определяется начальным запасом энергии и не зависит от параметров колебательной системы.
Собственная циклическая (круговая) частота ![]() зависит от параметров колебательной системы:
зависит от параметров колебательной системы:
![]() (2.1.15)
(2.1.15)
Период собственных колебаний: T0.
Линейная частота: n0.
Фаза колебания: Ф = w0t определяет значение смещения ![]() в данный момент времени.
в данный момент времени.
Если в момент времени t = 0 смещение ![]() , то фаза колебания
, то фаза колебания
Ф = w0t + j,
где j – начальная фаза колебания.
уравнение гармонических колебаний физического маятника:
 .(2.1.16)
.(2.1.16)
2.1.2.3.Математический маятник
Математический маятник – это частный случай физического маятника: размерами тела массой m пренебрегаем по сравнению с длиной подвеса ![]() (рис. 2.1.4).
(рис. 2.1.4).
Рис. 2.1.4. Математический маятник
Так как момент инерции материальной точки относительно т. О равен:
![]() ,(2.1.17)
,(2.1.17)
то собственная частота колебаний математического маятника:
![]() .(2.1.18)
.(2.1.18)
2.1.3.Динамика ЛГО
При динамическом рассмотрении ЛГО условие возникновения гармонических колебаний можно представить так:
вторая производная от смещения по времени должна быть прямо пропорциональна величине смещения из положения равновесия
![]() (2.1.27)
(2.1.27)
2.1.3.1.Пружинный маятник
Уравнение основного закона динамики поступательного движения материальной точки (второй закон Ньютона):
![]() .(2.1.28)
.(2.1.28)
Пружинный маятник в положении равновесия (рис. 2.1.5):
![]() или mg – kx0 = 0.
или mg – kx0 = 0.
Отсюда
![]() Þ
Þ ![]() .(2.1.29)
.(2.1.29)
Рис. 2.1.5. Динамика пружинного маятника
При смещении маятника из положения равновесия возникает возвращающая упругая сила
![]() .
.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
