

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Отсюда
![]() . (2.1.30)
. (2.1.30)
дифференциальное уравнение собственных колебаний пружинного маятника:
![]() .(2.1.31)
.(2.1.31)
Поскольку  – собственная циклическая частота колебаний пружинного маятника (2.1.7), то дифференциальное уравнение собственных колебаний можно представить в виде:
– собственная циклическая частота колебаний пружинного маятника (2.1.7), то дифференциальное уравнение собственных колебаний можно представить в виде:
![]() .(2.1.32)
.(2.1.32)
2.1.3.2.Физический маятник
Уравнение основного закона динамики вращательного движения абсолютно твердого тела:
![]() .(2.1.33)
.(2.1.33)
Так как для физического маятника (рис. 2.1.6) ![]() , то
, то
![]() .
.
При малых углах sinq » q (в радианах). Тогда:
![]() .(2.1.34)
.(2.1.34)
дифференциальное уравнение собственных колебаний физического маятника:
![]() .(2.1.35)
.(2.1.35)
Рис. 2.1.6. Динамика физического маятника:
¤![]() – вектор момента силы тяжести относительно точки О;
– вектор момента силы тяжести относительно точки О;
Ä![]() – вектор угла поворота
– вектор угла поворота
Поскольку  (2.1.15)– собственная циклическая частота колебаний, то дифференциальное уравнение собственных колебаний физического маятника:
(2.1.15)– собственная циклическая частота колебаний, то дифференциальное уравнение собственных колебаний физического маятника:
![]() .(2.1.36)
.(2.1.36)
Для математического маятника дифференциальное уравнение собственных колебаний:
![]() ,(2.1.37)
,(2.1.37)
где  – собственная циклическая частота (2.1.18).
– собственная циклическая частота (2.1.18).
Тогда дифференциальное уравнение собственных колебаний математического маятника тоже можно представить в виде:
![]() .(2.1.38)
.(2.1.38)
2.1.4.Графическое представление колебаний. Плоские диаграммы
2.1.4.1.Пружинный и физический (математический) маятники
Для произвольных колебательных систем дифференциальное уравнение собственных колебаний имеет вид:
![]() .(2.1.43)
.(2.1.43)
Зависимость смещения от времени (рис. 2.1.7)
![]() .(2.1.44)
.(2.1.44)
при условии, что начальная фаза j = 0.
Рис. 2.1.7. Графики зависимости смещения x и потенциальной энергии U от времени t
Поскольку потенциальная энергия ЛГО пропорциональна квадрату смещения осциллятора из положения равновесия, то зависимость потенциальной энергии от времени (см. рис. 2.1.7):
![]() .(2.1.45)
.(2.1.45)
Поскольку зависимость скорости колебания от времени (рис. 2.1.8)
![]() ,(2.1.46)
,(2.1.46)
а кинетическая энергия ЛГО пропорциональна квадрату скорости, то зависимость кинетической энергии от времени (см. рис. 2.1.8):
![]() .(2.1.47)
.(2.1.47)
Рис. 2.1.8. Графики зависимости скорости колебания ![]() и кинетической энергии K от времени t
и кинетической энергии K от времени t
Поскольку зависимость ускорения ЛГО от времени (рис. 2.1.9)
 ,(2.1.48)
,(2.1.48)
а возвращающая сила пропорциональна ускорению
![]() ,(2.1.49)
,(2.1.49)
то график зависимости возвращающей силы от времени будет аналогичен графику ускорения (см. рис. 2.1.10).
Рис. 2.1.9. Графики зависимости ускорения ![]() и
и
возвращающей силы F от времени t
Так же будет выглядеть и график зависимости от времени момента возвращающей силы, действующей на физический (математический) маятник
2.1.5.Векторное представление колебаний (векторная диаграмма)
Сложение нескольких гармонических функций становится наглядным, если изображать колебания графически в виде амплитудных векторов на плоскости. Проекция конца вектора ![]() на ось Оx (рис. 2.1.10)
на ось Оx (рис. 2.1.10)
![]() , (2.1.56)
, (2.1.56)
где ![]() - - амплитуда колебаний, будет совершать гармоническое колебание с амплитудой А, равной длине амплитудного вектора
- - амплитуда колебаний, будет совершать гармоническое колебание с амплитудой А, равной длине амплитудного вектора ![]() , с циклической частотой, равной угловой скорости w0 вращения вектора
, с циклической частотой, равной угловой скорости w0 вращения вектора ![]() , и с начальной фазой j, равной углу, образуемому вектором
, и с начальной фазой j, равной углу, образуемому вектором ![]() с осью ОХ в начальный момент времени.
с осью ОХ в начальный момент времени.
Рис. 2.1.10. Векторная диаграмма гармонического колебания
Полученная таким способом схема называется векторной диаграммой.
2.1.6.Сложение колебаний
2.1.6.1. Сложение колебаний одинакового направления
Рассмотрим сложение двух гармонических колебаний и одинаковой частоты. Смещение х колеблющегося тела будет суммой смещений xl и х2, которые запишутся следующим образом:
 (2.1.57)
(2.1.57)
Представим оба колебания с помощью векторов ![]() и
и ![]() (рис. 2.1.11). Построим пo правилам сложения векторов результирующий вектор
(рис. 2.1.11). Построим пo правилам сложения векторов результирующий вектор![]() . Легко видеть, что проекция этого вектора на ось Х равна сумме проекций слагаемых векторов:
. Легко видеть, что проекция этого вектора на ось Х равна сумме проекций слагаемых векторов:
![]()
Следовательно, вектор ![]() представляет собой результирующее колебание. Этот вектор вращается с той же угловой скоростью
представляет собой результирующее колебание. Этот вектор вращается с той же угловой скоростью ![]() , как и так что результирующее движение будет гармоническим колебанием с частотой
, как и так что результирующее движение будет гармоническим колебанием с частотой![]() , амплитудой А и начальной фазой α. Из построения видно, что
, амплитудой А и начальной фазой α. Из построения видно, что
 (2.1.58)
(2.1.58)
Итак, представление гармонических колебаний посредством векторов дает возможность свести сложение нескольких колебаний к операции сложения векторов.
Этот прием бывает особенно полезен, например, в оптике, где световые колебания в некоторой точке определяются как результат наложения многих колебаний, приходящих в данную точку от различных участков волнового фронта.
Проанализируем выражение (2.1.58) для амплитуды. Если разность фаз обоих колебаний ![]() равна нулю, амплитуда результирующего колебания равна сумме
равна нулю, амплитуда результирующего колебания равна сумме  . Если разность фаз
. Если разность фаз![]() равна +л или - π, т. е. оба колебания находятся в противо-фазе, то амплитуда результирующего колебания равна разности .
равна +л или - π, т. е. оба колебания находятся в противо-фазе, то амплитуда результирующего колебания равна разности .
Рис.2.1.11.Сложение колебаний одинакового направления
Если частоты колебаний х1 и х2 неодинаковы, векторы![]() и
и![]() будут вращаться с различной скоростью. В этом случае результирующий вектор
будут вращаться с различной скоростью. В этом случае результирующий вектор![]() пульсирует по величине и вращается с непостоянной скоростью. Следовательно, результирующим движением будет в этом случае не гармоническое колебание, а некоторый сложный колебательный процесс - биения.
пульсирует по величине и вращается с непостоянной скоростью. Следовательно, результирующим движением будет в этом случае не гармоническое колебание, а некоторый сложный колебательный процесс - биения.
2.1.6.2.Сложение взаимно перпендикулярных колебаний
Допустим, что материальная точка может совершать колебания как вдоль оси Х, так и вдоль перпендикулярной к ней оси у. Если возбудить оба колебания, материальная точка будет двигаться по некоторой, вообще говоря, криволинейной траектории, форма которой зависит от разности фаз обоих колебаний.
Выберем начало отсчета времени так; чтобы начальная фаза первого колебания была равна нулю. Тогда уравнения колебаний запишутся следующим образом:
 (2.1.59)
(2.1.59)
где α— разность фаз обоих колебаний.
Выражения (2.1.59) представляют собой заданное в параметрической форме уравнение траектории, по которой движется тело, участвующее в обоих колебаниях. Чтобы получить уравнение траектории в обычном виде, нужно исключить из уравнений (2.1.59) параметр t. Из первого уравнения следует, что
![]() (2.1.60)
(2.1.60)
Следовательно,
 (2.1.61)
(2.1.61)
Теперь развернем косинус во втором из уравнений (2.1.59) по формуле для косинуса суммы, подставляя при этом вместо![]() и
и ![]() их значения (2.1.60)и (2.1.61). В результате получим
их значения (2.1.60)и (2.1.61). В результате получим
 (2.1.62)
(2.1.62)
Последнее уравнение после несложных преобразований можноv ч привести к виду
 (2.1.63)
(2.1.63)
Из аналитической геометрии известно, что уравнение (2.1.63) есть уравнение эллипса, оси которого ориентированы относительно координатных осей х и у произвольно. Ориентация эллипса и величина его полуосей зависят довольно сложным образом от амплитуд А и В и разности фаз α.
Исследуем форму траектории в некоторых частных случаях.
1. Разность фаз α равна нулю. В этом случае из уравнения (2.1.63) получается уравнение прямой линии
![]() (2.1.64)
(2.1.64)
Колеблющаяся точка перемещается по этой прямой, причем расстояние ее от начала координат равно
![]()
Подставляя сюда выражения (2.1.59) для х и у и учитывая, что α = 0, получим закон, по которому r изменяется cо временем:
![]() (2.1.65)
(2.1.65)
Из (2.1.65)следует, что результирующее движение является гармоническим колебанием вдоль прямой с частотой ![]() и амплитудой, равной
и амплитудой, равной  (рис. 2.1.12 а ).
(рис. 2.1.12 а ).
2. Разность фаз α равна. Уравнение (2.1.63) будет иметь вид
![]() (2.1.66)
(2.1.66)
откуда получается, что результирующее движение представляет собой гармоническое колебание вдоль прямой (рис. 2.1.12 б)
 |
а б
Рис 2.1.12. Сложение взаимно-перпендикулярных колебаний с разностью фаз![]()
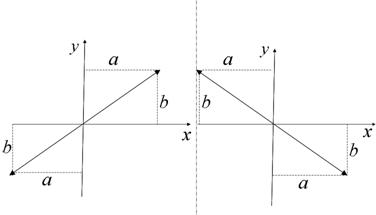
3. Разность фаз α равна![]() . При
. При ![]() уравнение (2.1.63) переходит в
уравнение (2.1.63) переходит в
 (2.1.67)
(2.1.67)
т. е. в уравнение эллипса, приведенного к координатным осям, причем полуоси эллипса равны соответствующим амплитудам колебаний (рис.2.1.13 слева). При равенстве амплитуд А и В эллипс вырождается в окружность.
Из сказанного следует, что равномерное движение по окружности радиуса R с угловой скоростью ω может быть представлено как сумма двух взаимно перпендикулярных колебаний:
![]() (2.1.68)
(2.1.68)
(знак «+» в выражении для «у» соответствует движению против часовой стрелки, знак «—» — движению по часовой стрелке).
В случае, когда частоты взаимно перпендикулярных колебаний отличаются на очень малую величину Δω, их можно рассматривать как колебания одинаковой частоты, но с медленно изменяющейся разностью фаз. В самом деле, уравнения колебаний можно представить следующим образом:
![]() (2.1.69)
(2.1.69)
и выражение (Δω+α) рассматривать как разность фаз, медленно изменяющуюся со временем по линейному закону.
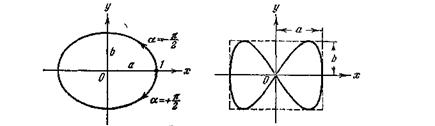
Рис.2.1.13. Сложение взаимно перпендикулярных колебаний
с разностью фаз ![]() .
.
Результирующее движение в этом случае происходит по медленно видоизменяющейся кривой, которая будет последовательно принимать форму, отвечающую всем значениям разности фаз от –π до +л. Если частоты взаимно перпендикулярных колебаний не одинаковы, то траектория результирующего движения имеет вид довольно сложных кривых, называемых фигурами Лиссажу. На рис. 2.1.13 (справа) показана одна из простейших траекторий, получающаяся при отношении частот 1 : 2 и разности фаз π/2.
2.2. Затухающие колебания. Вынужденные колебания.
2.2.1.Затухающие колебания
2.2.1.1.Пружинный маятник
Второй закон Ньютона для пружинного маятника в вязкой среде:
![]() , (2.2.1.)
, (2.2.1.)
где ![]() – сила вязкого трения;
– сила вязкого трения;
r – коэффициент трения.
Тогда дифференциальное уравнение затухающих колебаний пружинного маятника:
![]() (2.2.2)
(2.2.2)
или
![]() .(2.2.3)
.(2.2.3)
Здесь
![]() (2.2.4)
(2.2.4)
– коэффициент затухания.
Для произвольных колебательных систем дифференциальное уравнение затухающих колебаний имеет вид:
![]() ,(2.2.5)
,(2.2.5)
а его решение
![]() ,(2.2.6)
,(2.2.6)
где
![]() (2.2.7)
(2.2.7)
– частота затухающих колебаний;
T ¢ – период затухающих колебаний.
Затухающие колебания – это пример квазипериодического процесса, так как в каждом периоде амплитуда уменьшается по закону (рис. 2.2.1):
![]() .(2.2.8)
.(2.2.8)
Рис. 2.2.1. График зависимости амплитуды A затухающих колебаний от времени t
2.2.1.2.Режимы затухания
β < ω0 – квазипериодический колебательный режим (рис. 2.2.2).
Рис. 2.2.2. График затухающих колебаний
β = ω0 – критический режим: период колебаний обращается в бесконечность, то–есть движение перестает быть периодическим.
Условие критического режима:
для пружинного маятника:
![]() ;(2.2.9)
;(2.2.9)
для электрического колебательного контура:
![]() .(2.2.9)
.(2.2.9)
β > ω0 ![]() – апериодический режим (рис. 2.2.3): колебательная система, выведенная из положения равновесия, возвращается в положение равновесия, не совершая колебаний:
– апериодический режим (рис. 2.2.3): колебательная система, выведенная из положения равновесия, возвращается в положение равновесия, не совершая колебаний:
а) если при t = 0 скорость колебаний υ0 = 0, то движение изображается кривой 1;
б) если при t = 0 скорость колебаний отлична от нуля, то движение изображается кривой 2.
Рис. 2.2.3. Графики апериодического режима затухающих колебаний
2.2.1.3.Параметры затухающих колебаний
коэффициент затухания b
Если за некоторое время te амплитуда колебаний уменьшается в e раз
 ,
,
то
 .
.
тогда  , а, следовательно,
, а, следовательно,
![]() ,(2.2.10)
,(2.2.10)
где te – время релаксации.
Логарифмический декремент затухания l
Логарифмический декремент равен натуральному логарифму отношения амплитуд соседних колебаний, то есть отличающихся на один период T ¢:
 .(2.2.11)
.(2.2.11)
Физический смысл логарифмического декремента l – величина, обратная числу колебаний, в течение которых амплитуда убывает в e раз:
![]() .(2.2.12)
.(2.2.12)
Добротность Q
Добротность определяется как величина, обратно пропорциональная логарифмическому декременту затухания:
![]() .(2.2.13)
.(2.2.13)
При слабом затухании:
а) для пружинного маятника
 .(2.2.14)
.(2.2.14)
б)для электрического колебательного контура
 .(2.2.15)
.(2.2.15)
При слабом затухании добротность можно представить как
![]() ,(2.2.16)
,(2.2.16)
где Е0 – запасенная энергия;
DE – потери энергии за один период.
2.2.2. Вынужденные колебания
Вынужденными колебаниями называются колебания, происходящие под действием внешней переменной (периодической) силы, работа которой компенсирует потери энергии на преодоление трения (в механических колебательных системах) и на преодоление электрического сопротивления (в электрических колебательных системах).
2.2.2.1.Пружинный маятник
В соответствии со вторым законом Ньютона:
![]() ,
, , (2.2.17)
, (2.2.17)
где
 (2.2.18)
(2.2.18)
– внешняя периодическая сила, действующая на пружинный маятник.
В скалярном виде:
![]() .(2.2.19)
.(2.2.19)
Дифференциальное уравнение вынужденных колебаний пружинного маятника:
![]()
можно представить в виде
![]() ,(2.2.20)
,(2.2.20)
где
![]() (2.2.21)
(2.2.21)
– приведенная сила.
2.2.2.2.Решение дифференциального уравнения вынужденных колебаний (на примере пружинного маятника)
В колебательной системе одновременно происходят два процесса:
1. Затухающие колебания x1(t);
2. Незатухающие вынужденные колебания x2(t) с частотой вынуждающей силы.
Решение дифференциального уравнения вынужденных колебаний (2.2.20)
представим в виде суммы двух решений
x = x1 + x2:
1. Общее решение однородного уравнения затухающих колебаний:
![]() ,(2.2.21)
,(2.2.21)
где ![]() – циклическая частота затухающих колебаний.
– циклическая частота затухающих колебаний.
2. Частное решение неоднородного уравнения вынужденных колебаний:
![]() ,(2.2.22)
,(2.2.22)
где y(w) – начальная фаза вынужденных колебаний.
Подставим x2 в исходное дифференциальное уравнение и получим:
 .(2.2.23)
.(2.2.23)
Для использования метода векторной диаграммы представим это уравнение в виде:

 .(2.2.24)
.(2.2.24)
Из этого уравнения следует, что постоянные А и ![]() должны иметь такие значения, чтобы гармоническая функция f0 cos wt была равна сумме трех гармонических функций, стоящих в левой части этого уравнения.
должны иметь такие значения, чтобы гармоническая функция f0 cos wt была равна сумме трех гармонических функций, стоящих в левой части этого уравнения.
Представим (рис. 2.2.4 а, б):
– функцию ![]() вектором
вектором ![]() ;
;
– функцию ![]() вектором
вектором ![]() , повернутым относительно вектора
, повернутым относительно вектора ![]() на угол (–y);
на угол (–y);
– функцию ![]() вектором
вектором ![]() , повернутым на угол
, повернутым на угол ![]() относительно вектора
относительно вектора ![]() ;
;
– функцию ![]() вектором
вектором ![]() , повернутым относительно вектора
, повернутым относительно вектора ![]() на угол p.
на угол p.
Рис. 2.2.4. Векторные диаграммы для решения дифференциального уравнения вынужденных колебаний: а) w < w0 и б) w > w0
Чтобы рассматриваемое уравнение было удовлетворено, должно выполняться следующее векторное равенство
![]() .(2.2.25)
.(2.2.25)
Векторные диаграммы, соответствующие случаям w < w0 и w > w0, представлены на рис. 2.2.4, а, б.![]()
Из этих диаграмм следует, что уравнение справедливо, если
 и
и ![]() при w < w0 (2.2.26)
при w < w0 (2.2.26)
и
 и
и ![]() при w > w0. (2.2.27)
при w > w0. (2.2.27)
Резонансом называют явление резкого увеличения амплитуды вынужденных колебаний при приближении частоты вынуждающей силы к частоте собственных колебаний (w ® w0).
При w ® w0 tgy ® ¥ и начальная фаза y стремится к ![]() , то есть вектор внешней силы становится параллельным вектору скорости маятника.
, то есть вектор внешней силы становится параллельным вектору скорости маятника.
A = A(w) – амплитудно-частотная характеристика (резонансная кривая) представлена на рис. 2.2.5.
Рис. 2.2.5. Амплитудно-частотная характеристика вынужденных колебаний: Aрез– резонансная амплитуда, Aстат – статическая амплитуда
Функция A(w) достигает экстремума при частоте вынуждающей силы w, равной
![]() , (2.2.28)
, (2.2.28)
здесь wрез – резонансная частота.
Если w ® 0, то
 , (2.2.29)
, (2.2.29)
здесь Aстат – статическая амплитуда.
при w ® ¥ амплитуда вынужденных колебаний A ® 0.
При достижении резонансной частоты
w ® wрез
амплитуда стремится к резонансной величине
![]() ,(2.2.30)
,(2.2.30)
здесь Aрез – резонансная амплитуда.
Семейство резонансных кривых при различных коэффициентах затухания представлено на рис. 2.2.6.

Рис. 2.2.6. Амплитудно-частотные характеристики при различных коэффициентах затухания
При критическом затухании
![]() (2.2.31)
(2.2.31)
резонанс не наступает – резонансная частота wрез стремится к нулю.
Добротность колебательной системы, находящейся в режиме вынужденных колебаний, можно найти как
![]() ,(2.2.32)
,(2.2.32)
где Dw0,7 – ширина резонансной кривой (рис. 2.2.7) на уровне половинной мощности внешнего источника вынуждающей силы
![]() .
.
Рис. 2.2.7. Определение величины добротности
Добротность можно представить и как отношение резонансной амплитуды к статической, т. е. как коэффициент усиления:
![]() .(2.2.33)
.(2.2.33)
При слабом затухании добротность равна
![]() .(2.2.34)
.(2.2.34)
2.2.2.3.Процесс установления вынужденных незатухающих колебаний
Процесс установления вынужденных незатухающих колебаний можно представить как процесс сложения двух колебаний:
1. затухающих колебаний (рис. 2.2.8);
![]() ;
;
Рис. 2.2.8. Затухающие колебания
2. вынужденных колебаний (рис. 2.2.9)
![]() ,
,
где y = (p – j) – начальная фаза;
w – частота вынуждающей силы.
Рис. 2.2.9. Вынужденные колебания
Суммирование двух процессов
![]()
для случая A = A0 и приводит к процессу установления незатухающих вынужденных колебаний (рис. 2.2.10).
Рис. 2.2.10. Процесс установления незатухающих вынужденных колебаний
Вынужденные колебания считают установившимися, если
![]() .(2.2.35)
.(2.2.35)
Тогда время установления незатухающих вынужденных колебаний равно:
![]() ,(2.2.36)
,(2.2.36)
т. е. чем больше затухание в системе, тем быстрее устанавливаются незатухающие вынужденные колебания.
Раздел 3. Основы специальной теории относительности /1а, 1б, 3б/
(2 часа)
3.1. Основы специальной теории относительности.
Лекция 10.
Основы специальной теории относительности.
Постулаты Специальной Теории Относительности Эйнштейна
• Принцип относительности: ВСЕ ЗАКОНЫ ПРИРОДЫ ОДИНАКОВЫ ВО ВСЕХ ИНЕРЦИАЛЬНЫХ СИСТЕМАХ ОТСЧЕТА
• Принцип постоянства скорости света: СКОРОСТЬ СВЕТА В ВАКУУМЕ ОДИНАКОВА ВО ВСЕХ ИНЕРЦИАЛЬНЫХ СИСТЕМАХ ОТСЧЕТА И НЕ ЗАВИСИТ ОТ ДВИЖЕНИЯ ИСТОЧНИКОВ И ПРИЕМНИКОВ СВЕТА
c = 2,9979246·108 м/с ≈ 3·108 м/с
Преобразования координат и времени
 |
(1) При t = t’ = 0 начала координат обеих систем совпадают: x0 = x’0’ = x0’ = x’0 = 0
(2) x0’ = v0·t (2’) x’0 = – v0·t’
Чтобы выполнялись (1) и (2), для любой точки должно быть:
(3) x = γ·(x’ + v0·t’) (3’) x’ = γ·(x – v0·t)
Пусть при t = t’ = 0 в начале координат произойдет вспышка света.
После этого будет двигаться «фронт световой волны» - граница светлой и темной зон пространства
 |
Поскольку системы координат равноправны, а скорость света одинакова в обеих системах координат, то координата «фронта»:
(4) x = c·t; (4’) x’ = c·t’
(3) x = γ·(x’ + v0·t’) (3’) x’ = γ·(x – v0·t)
(4) x = c·t; (4’) x’ = c·t’
(5) c·t = γ·(c·t’ + v0·t’) (5’) c·t’ = γ·(c·t – v0·t)
Вынесем за скобки время и перемножим (5) и (5’)
c2 = γ2·(c2 – v02)
Преобразования Лоренца
Относительность одновременности
Два события в нештрихованной системе отсчета происходят одновременно, но в точках с разными координатами x.
 |
В штрихованной системе отсчета они произойдут в разное время t’.
Относительность длины
Рассмотрим стержень, неподвижный в нештрихованной системе отсчета. Его длина Δx = xконца - xначала
 |
Если в штрихованной системе отсчета (где стержень движется) одновременно (t’=const) замерить x’конца и x'начала, то с учетом, что![]()
![]()
Относительность промежутка времени

Интервал
Что не меняется при переходе из одной системы отсчета в другую?
Из преобразований Лоренца можно получить
c2·t2-x2-y2-z2=c2·t’2-x’2-y’2-z’2
Величина  называется интервал
называется интервал
s2 > 0 Þ s – действительное число Þ интервал времениподобный, может разделять события, имеющие причинно-следственную связь
s2 = 0 Þ s = 0 Þ интервал светоподобный: движение луча света
s2 < 0 Þ s – мнимое число Þ интервал пространственноподобный, не может разделять события, имеющие причинно-следственную связь
Преобразование скоростей


Аналогично
Релятивистское выражение для импульса
![]()
Релятивистское выражение для массы
![]()
Релятивистское выражение для энергии
Сила 


E=mc2 – полная энергия
Взаимосвязь энергии и импульса
E=mc2 ; p=mv Þ 


![]()
![]()
 - эта разность не меняется при переходе от одной системы координат к другой – она инвариантна относительно преобразования системы координат.
- эта разность не меняется при переходе от одной системы координат к другой – она инвариантна относительно преобразования системы координат.
Рекомендуемая литература (основная и дополнительная).
а) Основная литература:
1а. Савельев общей физики. Кн. 1. АСТ – Москва. 2006
2а. Сивухин курс физики. Молекулярная физика. М. Наука с.
3а. Иродов по общей физике. М. Лань. с.
4а. Волькенштейн задач по общему курсу физики. М. Наука 1990-67с.
5а. Физика. Раздел механика. Лабораторный практикум. М. МИСиС 1998-67с.
6а. , , Ушакова . Сборник задач для домашних заданий. Задания и методические указания. М. МИСиС 1998-95с.
7а. Физика. Раздел молекулярная физика и термодинамика. Лабораторный практикум. М. МИСиС 1997-83с.
8а. , , Ушакова . Механика. Молекулярная физика. Термодинамика. Учебное пособие для самостоятельной работы по решению задач. Под редакцией М. МИСиС с.
9а. Сборник контрольных вопросов и задач для самостоятельной работы студентов. Под редакцией М. МИСиС 2001-31с.
б) Дополнительная литература:
1б. , , Милковская физики. Том 1. М. Высшая школа. – 1977 – 375 с.
2б. Ч. Киттель, У. Найт, М. Рудерман Механика. Берклиевский курс физики. М. Лань с.
3б. , Физика. Физические основы механики. Учебное пособие М. МИСиС с.
[1] Еще она является наукой нового времени.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
