
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral

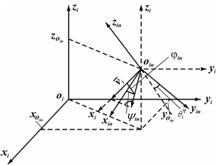
Рисунок 3 – Расчетная схема поезда
Учет неголономности связей в расчетной схеме рельсового экипажа не приближает модель его движения к действительности. На основании этого предполагается, что на опорные тела расчетной схемы системы при их агрегировании наложены только голономные связи и поэтому она является голономной.
Выбранная таким образом расчетная схема системы в зависимости от решаемой задачи и целей исследований без выхода за рамки предлагаемой методики моделирования динамики поезда может быть легко трансформирована как в сторону более подробного рассмотрения отдельных элементов - путем декомпозиции их расчетных схем, так и в сторону усечения - путем объединения тел таких схем в укрупненные. Однако необходимая степень детализации или возможность усечения упомянутой расчетной схемы системы в каждом конкретном случае должна быть обоснована. Указанное значительно повышает универсальность предлагаемой методики моделирования движения поезда, т. е. расширяет круг задач его динамики, эффективно решаемых с ее использованием.
Как известно, вид математической модели движения зависит от выбора координат, в которых оно рассматривается. Сравнительная ограниченность района в отношении скорости движения железнодорожного поезда позволяет рассматривать его происходящим около «плоской неподвижной» Земли. Иными словами, при рассмотрении такого движения геотопическую (жестко связанную с поверхностью Земли) систему отсчета можно приближенно считать инерциальной. Исходя из изложенного движение экипажа поезда по пути рассматривается с использованием следующих правых взаимоподвижных декартовых систем координат:
1 Неподвижной инерциальной базовой геотопической ![]() , плоскость
, плоскость ![]() которой занимает некоторое заданное неизменное положение, а ось
которой занимает некоторое заданное неизменное положение, а ось ![]() направлена вверх. В зависимости от способа введения эта система координат может связываться либо локально с элементом пути (при этом каждый из них имеет свою неподвижную систему), либо глобально со всем его участком, на котором рассматривается движение поезда. При первом способе введения (рисунок 4, а) неподвижная система ориентируется так, что проекции оси элемента пути (к которому она относится) на ее плоскости
направлена вверх. В зависимости от способа введения эта система координат может связываться либо локально с элементом пути (при этом каждый из них имеет свою неподвижную систему), либо глобально со всем его участком, на котором рассматривается движение поезда. При первом способе введения (рисунок 4, а) неподвижная система ориентируется так, что проекции оси элемента пути (к которому она относится) на ее плоскости ![]() и
и ![]() являются дугами окружностей некоторых постоянных (в пределах такого элемента) радиусов. При втором способе введения (рисунок 4, б) плоскость
являются дугами окружностей некоторых постоянных (в пределах такого элемента) радиусов. При втором способе введения (рисунок 4, б) плоскость ![]() такой системы удобно расположить компланарно плоскости местного горизонта на уровне моря (так как при этом аппликата любой точки оси пути есть ее высота над этим уровнем - величина, определяемая строительной документацией по его возведению), а ось
такой системы удобно расположить компланарно плоскости местного горизонта на уровне моря (так как при этом аппликата любой точки оси пути есть ее высота над этим уровнем - величина, определяемая строительной документацией по его возведению), а ось ![]() - так, чтобы она занимала положение, обратное азимутальному (т. е. была направлена с севера на юг).
- так, чтобы она занимала положение, обратное азимутальному (т. е. была направлена с севера на юг).
а б
![]()
![]()
Рисунок 4 – Способы введения неподвижной системы координат
Ось ![]() при этом автоматически занимает положение местной вертикали. Каждый из указанных способов введения неподвижной системы имеет при решении конкретной задачи определенные преимущества и недостатки, так что выбор между ними определяется обеспечением удобства рассмотрения. Для определенности рассуждений далее везде будет предполагаться второй способ введения такой системы координат.
при этом автоматически занимает положение местной вертикали. Каждый из указанных способов введения неподвижной системы имеет при решении конкретной задачи определенные преимущества и недостатки, так что выбор между ними определяется обеспечением удобства рассмотрения. Для определенности рассуждений далее везде будет предполагаться второй способ введения такой системы координат.
а б
![]()
![]()
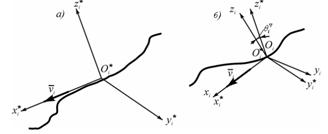
Рисунок 5 – Пространственная ориентация скоростной (а) и поточной (б) систем координат
2 Скоростной естественной ![]() (рисунок 5, а), начало которой скользит вдоль кривой оси пути со скоростью
(рисунок 5, а), начало которой скользит вдоль кривой оси пути со скоростью ![]() движения экипажа, а оси вместе с соединяющими их координатными плоскостями образуют сопровождающий трехгранник этой кривой. Ось
движения экипажа, а оси вместе с соединяющими их координатными плоскостями образуют сопровождающий трехгранник этой кривой. Ось ![]() при этом имеет направление
при этом имеет направление ![]() . С каждым экипажем связывается одна такая система, характеризующая его невозмущенное движение вдоль оси пути.
. С каждым экипажем связывается одна такая система, характеризующая его невозмущенное движение вдоль оси пути.
3 Поточной ![]() (рисунок 5, б), отличающейся от скоростной лишь тем, что ее плоскость
(рисунок 5, б), отличающейся от скоростной лишь тем, что ее плоскость ![]() повернута относительно плоскости
повернута относительно плоскости  на угол скоростного крена
на угол скоростного крена ![]() . У этих систем, естественно, совпадают начала (точки
. У этих систем, естественно, совпадают начала (точки ![]() и
и ![]() ) и оси
) и оси ![]() и
и ![]() . Ось же
. Ось же ![]() поточной системы скользит по головкам рельсовых нитей. С экипажем связывается одна поточная система, отслеживающая пространственную конфигурацию поверхности пути, по которому он движется.
поточной системы скользит по головкам рельсовых нитей. С экипажем связывается одна поточная система, отслеживающая пространственную конфигурацию поверхности пути, по которому он движется.
4 Связанной ![]() (рисунок 6), каждая из которых относится к одному из тел расчетной схемы экипажа. Начало такой системы совпадает с центром масс упомянутого (n-го) тела, а оси являются его главными центральными осями инерции. Для экипажа вводится столько связанных систем, сколько опорных тел в его расчетной схеме.
(рисунок 6), каждая из которых относится к одному из тел расчетной схемы экипажа. Начало такой системы совпадает с центром масс упомянутого (n-го) тела, а оси являются его главными центральными осями инерции. Для экипажа вводится столько связанных систем, сколько опорных тел в его расчетной схеме.
Рисунок 6 – Расположение связанной системы координат одного из тел расчетной схемы экипажа
Попарное пространственное взаиморасположение введенных координатных систем определяется линейными и угловыми координатами (последние из которых составляют одну из полных систем самолетных углов) следующим образом:
- каждой из связанных систем координат относительно поточной того же экипажа (рисунок 7) - линейными координатами ![]() ,
, ![]() ,
, ![]() (характеризующими колебания подергивания, бокового относа и подпры-гивания п-го тела расчетной схемы экипажа) и угловыми: углом атаки
(характеризующими колебания подергивания, бокового относа и подпры-гивания п-го тела расчетной схемы экипажа) и угловыми: углом атаки ![]() (галопирования) между вектором скорости экипажа
(галопирования) между вектором скорости экипажа ![]() (осью
(осью ![]()
![]() ) и плоскостью
) и плоскостью ![]() ; углом скольжения
; углом скольжения ![]() (виляния) между проекцией
(виляния) между проекцией ![]() на плоскость
на плоскость ![]() и осью
и осью ![]() , углом поперечной (боковой) качки
, углом поперечной (боковой) качки ![]() , между осью
, между осью ![]() и плоскостью
и плоскостью ![]() ;
;
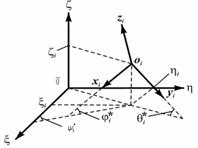
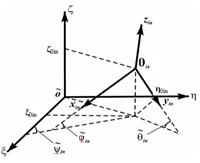
- поточной системы координат относительно неподвижной (рисунок 8) - линейными координатами ![]() (определяющими пространственное положение точки оси пути) и угловыми: углом наклона оси пути
(определяющими пространственное положение точки оси пути) и угловыми: углом наклона оси пути ![]() - между осью
- между осью ![]() и плоскостью
и плоскостью ![]() , углом ее отклонения
, углом ее отклонения ![]() между проекцией
между проекцией ![]() на плоскость
на плоскость ![]() и осью
и осью ![]() , углом боковой подуклонки
, углом боковой подуклонки ![]() между осью
между осью ![]() и плоскостью
и плоскостью ![]() - в совокупности с линейными координатами, определяющими пространственное положение элемента поверхности пути;
- в совокупности с линейными координатами, определяющими пространственное положение элемента поверхности пути;
|
|
Рисунок 7 – Пространственное взаиморасположение связанной и поточной систем координат | Рисунок 8 – Пространственное взаиморасположение поточной и неподвижной систем координат |
- каждой из связанных систем координат относительно неподвижной (рисунок 9) - линейными координатами ![]() (определяющими пространственное положение центра масс п-го тела расчетной схемы экипажа) и угловыми: углом тангажа
(определяющими пространственное положение центра масс п-го тела расчетной схемы экипажа) и угловыми: углом тангажа ![]() между осью
между осью ![]() и плоскостью
и плоскостью ![]() ; углом курса
; углом курса ![]() между проекцией оси
между проекцией оси  на плоскость
на плоскость ![]() и осью
и осью ![]() , углом крена
, углом крена ![]() между осью
между осью ![]() и плоскостью
и плоскостью ![]() (определяющими пространственное положение главных центральных осей инерции соответствующего тела).
(определяющими пространственное положение главных центральных осей инерции соответствующего тела).
На основании описанной системы линейных и угловых координат принимаются следующие опорные координаты экипажа (под опорными понимаются координаты, полностью определяющие пространственное положение опорных тел системы):
![]() перемещения вдоль оси пути, центров масс обрес-соренных (
перемещения вдоль оси пути, центров масс обрес-соренных (![]() опускается) и необрессоренных (передней при
опускается) и необрессоренных (передней при ![]() и задней при
и задней при ![]() тележек) частей экипажа;
тележек) частей экипажа;
![]() боковые относы и подпрыгивания тех же частей;
боковые относы и подпрыгивания тех же частей;
![]() углы поворотов частей вокруг продольно-горизонтальных, поперечно-горизонтальных и поперечно-вертикальных их главных центральных осей инерции;
углы поворотов частей вокруг продольно-горизонтальных, поперечно-горизонтальных и поперечно-вертикальных их главных центральных осей инерции;
![]() углы поворотов колесных пар экипажа вокруг их осей вращения.
углы поворотов колесных пар экипажа вокруг их осей вращения.
В принятой системе опорных координат уравнения связей наложенных на агрегат тел, имитирующих экипаж вытекающие из допущений, принятых при выборе его расчетной схемы, могут быть записаны в виде
 (1)
(1)
где ![]() средний радиус катания (без проскальзывании) колесных пар экипажа.
средний радиус катания (без проскальзывании) колесных пар экипажа.
Итак, на систему трех опорных тел (пространственное положение каждого из которых, естественно, определяется шестью координатами) с присоединенными к двум из них четырьмя колесными парами (имеющими возможность лишь вращаться вокруг своих осей и не имеющими никаких иных степеней свободы относительно тел ![]() , в состав которых они включены) наложено 12 связей, определяемых соотношениями (1).
, в состав которых они включены) наложено 12 связей, определяемых соотношениями (1).
Следовательно, агрегат имеет 10 степеней свободы, т. е. его пространственная конфигурация может быть полностью определена 10-ю обобщенными координатами. Под обобщенными координатами агрегата опорных тел понимаются независимые величины, вполне определяющие все их опорные координаты, количественно устанавливаемые числом степеней свободы указанного агрегата, любые значения которых совместны с наложенными на него связями. В качестве обобщенных для упомянутого агрегата принимаются следующие координаты:
 (2)
(2)
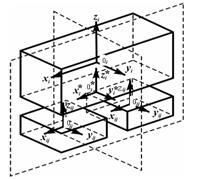
Вместе со своими первыми производными, т. е. обобщенными скоростями, принятые обобщенные координаты, как известно, полностью определяют динамическое состояние системы, имитирующей i-й экипаж поезда (рисунок 10). При описании движения поезда учитываются следующие возмущения системы: силы основного сопротивления движению экипажей ![]() ; силы дополнительного сопротивления их движению
; силы дополнительного сопротивления их движению ![]() , возникновение которых обусловлено кривизной пути в плане; силы дополнительного сопротивления тому же движению, вызванные иными причинами (например, низкой температурой окружающей среды, ветром и т. д. - они задаются в долях от
, возникновение которых обусловлено кривизной пути в плане; силы дополнительного сопротивления тому же движению, вызванные иными причинами (например, низкой температурой окружающей среды, ветром и т. д. - они задаются в долях от ![]() с помощью коэффициента
с помощью коэффициента ![]() ); тяговые
); тяговые ![]() и тормозные
и тормозные ![]() силы, развиваемые экипажами; составляющие весов их обрессоренных
силы, развиваемые экипажами; составляющие весов их обрессоренных ![]() и необрессоренных
и необрессоренных ![]() (
(![]() номер тележки) частей, действующие коллинеарно касательным к оси пути (в точках, соответствующих началам скоростных систем координат экипажей) и обусловленные наличием его продольного уклона (угла
номер тележки) частей, действующие коллинеарно касательным к оси пути (в точках, соответствующих началам скоростных систем координат экипажей) и обусловленные наличием его продольного уклона (угла ![]() ); центростремительные силы, действующие на обрессоренные (
); центростремительные силы, действующие на обрессоренные (![]() ) и необрессоренные (
) и необрессоренные (![]() ) части экипажей коллинеарно осям
) части экипажей коллинеарно осям ![]() и
и ![]() их поточных систем, определенные кривизной пути в плане и профиле; силы
их поточных систем, определенные кривизной пути в плане и профиле; силы  и крутящие моменты
и крутящие моменты ![]() взаимодействий экипажей (с передними - 1 и задними - 2 через (
взаимодействий экипажей (с передними - 1 и задними - 2 через (![]() )-е и
)-е и ![]() -е межэкипажные соединения); моменты трения
-е межэкипажные соединения); моменты трения ![]() , возникающие в пятниковых опорах кузовов экипажей; тангенциальные
, возникающие в пятниковых опорах кузовов экипажей; тангенциальные ![]() и нормальные
и нормальные ![]() составляющие сил взаимодействия их колес с рельсами.
составляющие сил взаимодействия их колес с рельсами.
|
|
Рисунок 9 – Пространственное взаиморасположение связанной и неподвижной систем координат | Рисунок 10 – Симметрия агрегата тел, имитирующего экипаж |
Предполагается, что ![]() и
и ![]() для каждого экипажа лежат на поверхности, определяемой точками контакта бандажей его колес с головками рельсов, и направлены коллинеарно-касательно к оси пути.
для каждого экипажа лежат на поверхности, определяемой точками контакта бандажей его колес с головками рельсов, и направлены коллинеарно-касательно к оси пути.
К внешним воздействиям на поезд относятся все перечисленные выше возмущения системы, за исключением сил и крутящих моментов взаимодействий экипажей, а также моментов трения в их подпятниках. Аналитические выражения для этих воздействий таковы:
![]() (3)
(3)
где ![]() полная масса экипажа;
полная масса экипажа; ![]() удельные основное и дополнительное (возникающее вследствие кривизны пути в плане) сопротивления его движению.
удельные основное и дополнительное (возникающее вследствие кривизны пути в плане) сопротивления его движению.
Аналитические выражения обобщенных сил системы ![]() определяются как коэффициенты при вариациях соответствующих обобщенных координат в выражениях виртуальных работ.
определяются как коэффициенты при вариациях соответствующих обобщенных координат в выражениях виртуальных работ.
В случае необходимости используется правило параллельного переноса векторов сил: те из них, точки приложения которых получают вариации, без изменения направлений их векторов приводятся к центру масс тела, к которому относится варьируемая координата, с одновременным учетом вращающих моментов этих сил относительно упомянутых центров масс. Возмущения, учитываемые при описании движения поезда, распределяются между телами расчетной схемы каждого из его экипажей следующим образом: к телу ![]() приложены силы
приложены силы ![]() и крутящие моменты
и крутящие моменты ![]() , а к телам
, а к телам ![]() – силы
– силы ![]() .
.
Как было принято, векторы перечисленных выше сил, за исключением ![]() , параллельны осям поточной системы координат экипажа:
, параллельны осям поточной системы координат экипажа: ![]() и
и ![]() оси
оси ![]() оси
оси ![]() оси
оси ![]() . Пространственная ориентация векторов
. Пространственная ориентация векторов ![]() и
и ![]() определяется углами
определяется углами ![]() и
и ![]() . Кроме того, при влияниях тел
. Кроме того, при влияниях тел ![]() и
и ![]() на поверхностях контакта пятников и подпятников, как отмечалось, возникают моменты трения
на поверхностях контакта пятников и подпятников, как отмечалось, возникают моменты трения ![]() . Исходя из описанной схемы нагружения тел агрегата аналитические выражения таких сил могут быть записаны в виде
. Исходя из описанной схемы нагружения тел агрегата аналитические выражения таких сил могут быть записаны в виде
![]()











 (4)
(4) ![]()



![]()
![]()


Таким образом, на примере построения математической модели движения железнодорожного поезда по пути произвольного очертания изложена предлагаемая методика моделирования такого движения. Продемонстрируем ее использование на примерах решения некоторых задач.
Kaк отмечено во введении, решение ряда частных задач динамики поезда во многих случаях на практике сводится к независимому исследованию отдельных видов его колебаний. Например, продольно-вертикальные и боковые движения довольно часто исследуют без учета их взаимосвязи или, по крайней мере, в предположении, что они слабо связаны между собой. Для исследования некоторых процессов такое предположение может быть приемлемо, поскольку экспериментами показано, что в зависимости от состояния пути, соотношения величин его неровностей в профиле и плане, а также скорости движения поезда определяющими могут быть колебания экипажей либо в вертикальной, либо в горизонтальной плоскости.
Однако из-за наличия существенных нелинейностей для системы поезд-путь принцип суперпозиции, как правило, неприемлем. В связи с этим независимое исследование колебаний ее элементов в различных плоскостях, весьма вероятно, может привести к неверным результатам, и решение задач динамики такой системы с нелинейными пространственными, кинематическими и силовыми связями в общем случае должно вестись с использованием нелинейных пространственных моделей.
О допустимости же изолированного рассмотрения движений системы по отдельным группам координат, в частности в плоскостях симметрии ее элементов, следует судить лишь на основе анализа полной модели пространственных движений, т. е. сопоставления по критериям, представляющим наибольший интерес в данном конкретном случае исследования, результатов реализации усеченных моделей с результатами, полученными при использовании полной модели или в процессе натурного эксперимента. Использование для исследований указанных полных моделей движения системы поезд-путь необходимо еще и потому, что упрощенные постановки делают принципиально невозможным корректное решение ряда практически важных задач ее динамики.
С математической точки зрения решение задачи о движении поезда сводится к интегрированию системы обыкновенных дифференциальных уравнений при ![]() начальных условиях
начальных условиях
![]() (5)
(5)
и из-за неоднозначности функции ![]() при дополнительных условиях
при дополнительных условиях
![]() . (6)
. (6)
Высокая размерность и существенная нелинейность упомянутых уравнений делают одним из наиболее эффективных методов их решения численную машинную реализацию (на ЭВМ), что, естественно, требует разработки ее алгоритма в качестве первого этапа. Результат такого приведения может быть представлен в виде
 (7)
(7)
где  ;
;  ;
;  обобщенные координаты, скорости и ускорения системы.
обобщенные координаты, скорости и ускорения системы.
Центральным в упомянутом алгоритме машинной реализации модели движения поезда, несомненно, должен быть блок интегрирования уравнений (7). Все иные блоки должны осуществлять соответствующее информационное обеспечение этого центрального процесса. Правые части уравнений типа (7) удовлетворяют условию Липшица, поэтому, как известно, их интегрирование может вестись с применением численных методов. Результаты анализа двух основных классов численных методов решения задачи Коши – одно - и многоступенчатых - приводят к заключению, что их сравнительные достоинства и недостатки взаимодополняющие (таблица 1).
Таблица 1 – Свойства численных методов решения задачи Коши
Свойства | Типы методов | |
Одноступенчатые | Многоступенчатые | |
Возможность начать интегрирование Экономичность в смысле затрат машинного времени для получения заданной точности решения Легкость изменения шага интегрирования Легкость получения оценки ошибки ограничена | Имеются, с использованием информации только об одной предыдущей точке решения Менее экономичны, так как для получения решения в последующей точке необходимы многократные вычисления в предыдущей Шаг может быть легко изменен, так как использована информация только об одной предыдущей точке решения Получение такой оценки весьма затруднительно | Отсутствуют, так как для продолжения решения нужна информация о нескольких предыдущих его точках Более экономичны, так как используется информация о предыдущих точках решения Для изменения шага решения оно должно быть начато обычно разгоном по одношаговому методу, от предыдущей точки Ошибка ограничения получается как побочный продукт вычислений |
Это делает целесообразным комбинированное использование указанных методов:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
