
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 629.13.05-62 + 528.56
А. Н. ДЗЮБА, А. В. ЛОПАРЕВ[1]
НЕСТАЦИОНАРНЫЙ АЛГОРИТМ ДЕМПФИРОВАНИЯ
ГИРОВЕРТИКАЛИ АВИАЦИОННОГО ГРАВИМЕТРА
Исследуется задача демпфирования возмущений системы гироскопической стабилизации авиационного гравиметра при маневрировании самолета в процессе проведения съемки. Предлагается нестационарный алгоритм демпфирования по скоростным измерениям спутниковой системы. Алгоритм учитывает наличие курсовой ошибки на маневре и основан на решении уравнений типа Риккати. Приводятся результаты моделирования системы стабилизации при различных моделях курсовой ошибки. Отмечается существенное снижение ошибок стабилизации при использовании предложенного подхода по сравнению с традиционным стационарным алгоритмом.
Введение
Возрастающие требования к проведению аэрогравиметрической съемки, выполняемой с борта летательного аппарата (ЛА), подразумевают, в частности, обеспечение надежности и достоверности проводимых измерений на любых участках полета. Известно, что при проведении съемки самолет движется прямолинейными участками траекторий с постоянным курсом и постоянной скоростью. При перелете с одного прямолинейного участка на другой совершается маневрирование – изменение курса на 180°. Как показано в работах [1,2], в условиях маневрирования двухосная гировертикаль гравиметра, демпфированная по скоростным спутниковым измерениям, без применения специальных мер возмущается, что приводит к потере гравиметрических данных на участке возмущения.
Погрешность вертикали на маневре обуславливается рядом факторов, среди которых можно выделить такие, как невыставка измерительных осей чувствительных элементов (гироскопов и акселерометров) относительно строительных осей ЛА; наличие нескомпенсированных дрейфов гироскопов, используемых в контуре стабилизации; наличие погрешностей определения масштабных коэффициентов гироскопов и акселерометров. Указанные погрешности можно отнести к группе технологических. Известно, что уменьшение уровня технологических погрешностей достигается на этапе калибровки. После калибровки остаточные технологические погрешности не приводят к существенным возмущениям вертикали гравиметра на маневре [1].
Однако для пересчета инерциальной скорости в географические оси и формирования разностных измерений в контуре демпфирования двухосной короткопериодной вертикали гравиметра требуется знание истинного курса. Курс может быть получен как с использованием внешних курсоуказателей (гирокомпаса, разнесенных антенн GPS/Глонасс), так и рассчитан аналитически с использованием гироскопа, установленного в плоскости гиростабилизированной платформы. Возмущения гировертикали, обусловленные погрешностью курсоуказания, являются существенными на маневре из-за значительных центростремительных ускорений, характерных для авиационной съемки.
В работе предложен нестационарный алгоритм демпфирования гировертикали, позволяющий подавлять возмущения на маневре либо существенно снижать их уровень. Представлены результаты моделирования погрешностей гировертикали, демонстрирующие эффективность предложенного алгоритма.
Постановка задачи
В работе [1] приведены уравнения погрешностей системы стабилизации при использовании двухосного карданова подвеса и при установке на внутреннее кольцо кардана датчика угловой скорости с вертикальной измерительной осью. При составлении уравнений погрешностей учтены смещения нулей акселерометров и неучтенные скорости ухода гироскопов, ошибки масштабных коэффициентов чувствительных элементов, а также несовпадение измерительных осей гироскопов и акселерометров относительно осей карданова подвеса. Рассмотрение условий функционирования гравиметра проводится без учета колебательных составляющих движений самолета, вызванных его креном, дифферентом и рысканием. Цепь коррекции использует разностный сигнал показаний спутниковой навигационной системы (СНС) и акселерометра (интеграл от соответствующей составляющей кажущегося ускорения).
Для оценки влияния погрешности курсоуказания на точность стабилизации далее рассмотрим упрощенную модель погрешностей для одного из каналов гировертикали (в данном случае – северного), которую можно схематично представить, как показано на рис. 1. Здесь ![]() – погрешность определения северной составляющей ускорения, обусловленная собственными погрешностями акселерометров и погрешностями пересчета в географические оси;
– погрешность определения северной составляющей ускорения, обусловленная собственными погрешностями акселерометров и погрешностями пересчета в географические оси; ![]() – погрешность определения скорости спутниковой системой;
– погрешность определения скорости спутниковой системой; ![]() ,
, ![]() – соответственно входной и выходной сигналы корректирующего фильтра;
– соответственно входной и выходной сигналы корректирующего фильтра; ![]() – угловая скорость ухода гироскопа; g – погрешность горизонтирования; R – радиус Земли; g – ускорение силы тяжести; F(p,t) – искомый алгоритм коррекции (в общем случае нестационарный), записанный в операторной форме. Заметим, что при наличии цепи коррекции гировертикаль становится короткопериодной.
– угловая скорость ухода гироскопа; g – погрешность горизонтирования; R – радиус Земли; g – ускорение силы тяжести; F(p,t) – искомый алгоритм коррекции (в общем случае нестационарный), записанный в операторной форме. Заметим, что при наличии цепи коррекции гировертикаль становится короткопериодной.
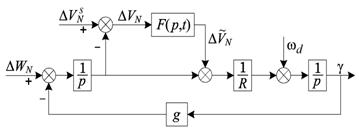
Рис.1. Структура формирования ошибки горизонтирования (северный канал)
Погрешность курсоуказания на маневре приводит к погрешностям пересчета линейного ускорения объекта в географические оси согласно выражениям:
 (1)
(1)
где ![]() ,
,![]() погрешности определения линейных ускорений в географических осях,
погрешности определения линейных ускорений в географических осях, ![]() центростремительное ускорение объекта,
центростремительное ускорение объекта, ![]() погрешность курсоуказания,
погрешность курсоуказания, ![]() истинный курс. Погрешность определения линейных ускорений в географических осях приводит, таким образом, к погрешности определения инерциальных скоростей.
истинный курс. Погрешность определения линейных ускорений в географических осях приводит, таким образом, к погрешности определения инерциальных скоростей.
Погрешность знания инерциальной скорости в географических осях обуславливает рассогласование инерциальной и спутниковой скоростей, которое при малых значениях ![]() (
( ) описывается выражениями
) описывается выражениями
 (2)
(2)
где ![]() ,
, ![]() - рассогласование северной и восточной составляющих скорости;
- рассогласование северной и восточной составляющих скорости; ![]() ,
,![]() - проекции центростремительного ускорения, возникающего при маневрировании, на оси географического сопровождающего трехгранника.
- проекции центростремительного ускорения, возникающего при маневрировании, на оси географического сопровождающего трехгранника.
Это рассогласование при использовании стационарной структуры фильтра F(p,t) = F(p) обуславливает возмущение вертикали при смене курса согласно выражению
 . (3)
. (3)
Следует отметить, что соотношение (2) справедливо только для малых погрешностей курсоуказания (![]() ).
).
При ![]() выражение (2) становится нелинейным. Также следует отметить, что в выражении (2) не учтены погрешности определения линейных скоростей по данным спутниковой навигационной системы (СНС) в силу их малости по сравнению с погрешностями инерциальной системы.
выражение (2) становится нелинейным. Также следует отметить, что в выражении (2) не учтены погрешности определения линейных скоростей по данным спутниковой навигационной системы (СНС) в силу их малости по сравнению с погрешностями инерциальной системы.
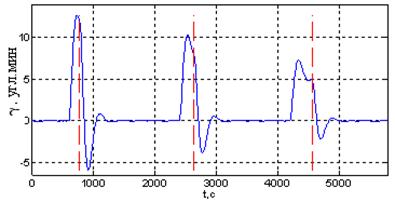
На рис.2.б показан характерный вид погрешности ![]() при движении ЛА со скоростью 100 м/с на участках маневрирования (рис 2.а) с погрешностью курсоуказания
при движении ЛА со скоростью 100 м/с на участках маневрирования (рис 2.а) с погрешностью курсоуказания ![]() при постоянной времени стационарного фильтра
при постоянной времени стационарного фильтра ![]() .
.
а)
б)
Рис. 2. Результаты моделирования: а) истинный курс;
б) погрешность вертикали при использовании стационарного фильтра)
На рис. 2.б штриховой линией показано время окончания маневра. При этом видно, что после окончания маневра переходный процесс вертикали еще не закончен. Длительность разворота на первом участке маневрирования составила  , на втором -
, на втором -  , на третьем -
, на третьем -  . Из рис. 2.б видно, что чем меньше время маневра, тем больше возмущение вертикали.
. Из рис. 2.б видно, что чем меньше время маневра, тем больше возмущение вертикали.
Характер переходного процесса вертикали на маневре определяется постоянной времени фильтра F(p). При увеличении постоянной времени уменьшаются ошибки стабилизации, но возрастает время переходного процесса. Характер возмущения вертикали, показанный на рис.2.б, аналогичен представленному в работе [1]. Это обуславливает актуальность задачи построения алгоритма стабилизации, малочувствительного к маневрированию при аэрогравиметрической съемке. При этом понятно, что разрабатываемый алгоритм должен иметь нестационарную структуру, так как любое изменение параметров стационарного фильтра при ненулевых начальных условиях приводит к возникновению переходного процесса гировертикали.
Предлагаемый нестационарный алгоритм демпфирования
В работах [3, 4] предложено использовать для демпфирования вертикали нестационарный фильтр, структура которого приведена на рис. 3. Такая структура получена в предположении о марковском характере процессов, описывающих скорости ухода гироскопов и погрешности СНС с привлечением идей метода локальных аппроксимаций (МЛА). Фактически при этом решается задача выделения сигнала u(t) с условной спектральной плотностью  на фоне помехи n(t) с условной спектральной плотностью
на фоне помехи n(t) с условной спектральной плотностью  , где
, где ![]() – среднеквадратическое значение скорости ухода гироскопа, a – величина, обратная постоянной времени корреляции ухода,
– среднеквадратическое значение скорости ухода гироскопа, a – величина, обратная постоянной времени корреляции ухода, ![]() – среднеквадратическая погрешность измерения скорости СНС, m – величина, обратная постоянной времени корреляции погрешности СНС. Такая задача может быть решена с использованием алгоритмов калмановской фильтрации при настройке фильтра на модель вида
– среднеквадратическая погрешность измерения скорости СНС, m – величина, обратная постоянной времени корреляции погрешности СНС. Такая задача может быть решена с использованием алгоритмов калмановской фильтрации при настройке фильтра на модель вида
![]() (4)
(4)
Здесь w и v – некоррелированные между собой белые шумы с интенсивностями ![]() и
и ![]() соответственно. Псевдоизмерения y представляют собой интеграл от суммарного сигнала (u + n). На рис. 3 также введено обозначение
соответственно. Псевдоизмерения y представляют собой интеграл от суммарного сигнала (u + n). На рис. 3 также введено обозначение ![]() – круговая частота шулеровских колебаний. При этом коэффициенты корректирующего фильтра Ki(t), показанного на рис. 3, представляют собой коэффициенты фильтра Калмана, настроенного на модель (4), и могут быть получены решением уравнений Рикатти
– круговая частота шулеровских колебаний. При этом коэффициенты корректирующего фильтра Ki(t), показанного на рис. 3, представляют собой коэффициенты фильтра Калмана, настроенного на модель (4), и могут быть получены решением уравнений Рикатти
 (5)
(5)
в соответствии с соотношением
 , (6)
, (6)
где  ,
,  ,
,  ,
,  .
.
Заметим, что в установившемся режиме вид передаточной функция корректирующего фильтра с точностью до пренебрежимо малых слагаемых совпадает с указанным в статье [1].
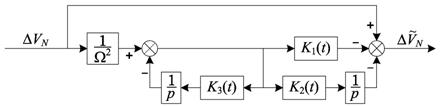
Рис.3. Структура нестационарного корректирующего фильтра
Анализ работы представленного алгоритма коррекции показывает, что, как и в случае использования стационарного фильтра, имеет место возмущение системы при смене курса.
Для эффективной работы алгоритма необходим учет погрешностей пересчета составляющих инерциальной скорости в географические оси, что обусловлено погрешностью курсоуказания. Поскольку настройки фильтра Калмана обеспечивают при горизонтировании подавление низкочастотной составляющей скоростной ошибки, при описании курсовой ошибки существенным будет ее поведение в области верхних частот. В связи с этим, следуя идеям МЛА, при описании курсовой ошибки может быть принята в рассмотрение винеровская модель [5] с интенсивностью порождающего шума ![]() , где
, где ![]() – среднеквадратическая погрешность измерения курса, b – величина, обратная постоянной времени корреляции погрешности курсоуказания. С учетом того, что наличие курсовой ошибки DK порождает скоростную ошибку
– среднеквадратическая погрешность измерения курса, b – величина, обратная постоянной времени корреляции погрешности курсоуказания. С учетом того, что наличие курсовой ошибки DK порождает скоростную ошибку  , где VE – восточная составляющая скорости, а также принимая во внимание размерности переменных состояния, вместо модели (4) на маневре будем использовать модель вида
, где VE – восточная составляющая скорости, а также принимая во внимание размерности переменных состояния, вместо модели (4) на маневре будем использовать модель вида
![]() (7)
(7)
где белый шум w1 имеет интенсивность Q1, а шум w2, не коррелированный с w1 и v, будет иметь интенсивность  .
.
В уравнении (5) матрица G принимает вид  , а вместо Q1 используется матрица интенсивностей порождающих шумов, которая при отсутствии маневра имеет вид
, а вместо Q1 используется матрица интенсивностей порождающих шумов, которая при отсутствии маневра имеет вид ![]() , а на маневре
, а на маневре  .
.
Аналогичные соотношения могут быть получены и при построении фильтра в восточном канале СГС. Переход от модели (4) к модели (7) осуществляется по условию превышения боковой составляющей ускорения выбранного порогового значения. При этом структура фильтра по-прежнему соответствует представленной на рис. 3, а переключение с одной модели на другую и обратно приводит лишь к пересчету значений коэффициентов Ki(t) путем решения соответствующего уравнения Риккати без обнуления выходов интеграторов.
Результаты моделирования предложенного алгоритма
При моделировании погрешности вертикали на маневре была использована модель движения самолета с постоянной скоростью (V = 100 м/c). Изменение истинного курса происходило, как показано на рис. 2 а, а погрешность курсоуказания моделировалась как постоянной величиной (рис.4), так и винеровским процессом с заданной интенсивностью порождающего шума.
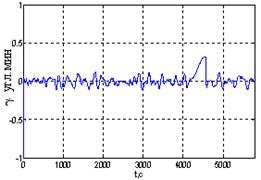
На рис. 4 представлены результаты моделирования погрешности вертикали при постоянстве погрешности курсоуказания.
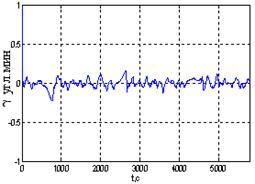
На рис. 5.в, 5.г представлены результаты моделирования погрешности вертикали при различных значениях интенсивности порождающего белого шума винеровского процесса ![]() , характеризующего погрешность курсоуказания (5.а, 5.б).
, характеризующего погрешность курсоуказания (5.а, 5.б).
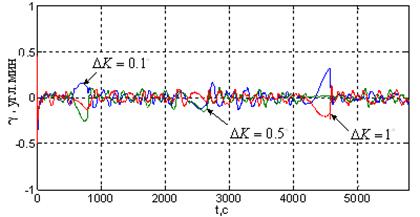
Рис. 4. Погрешность вертикали при постоянной погрешности курсоуказания
а) б)
в) г)
Рис. 5. Погрешности вертикали при случайной погрешности курсоуказания (винеровская модель):
а), в) погрешность курсоуказания и погрешность вертикали, ![]()
![]() ;
;
б), г) погрешность курсоуказания и погрешность вертикали при,![]()
![]() ;
;
Как показывают результаты моделирования (рис. 4, 5), предложенный нестационарный алгоритм коррекции позволяет исключить либо существенно снизить (по сравнению со стационарным алгоритмом) уровень возмущений СГС при маневрировании самолета. Уровень составляющих ошибок стабилизации, обусловленных выполнением маневра, находится в пределах ![]() 0,2¢.
0,2¢.
Заключение
В статье представлен новый нестационарный алгоритм коррекции системы гироскопической стабилизации авиационного гравиметра, эффективно демпфирующий возмущения системы на маневре. При этом используется традиционная структура построения гировертикали с коррекцией по скоростным измерениям спутниковой системы. Результаты исследований позволяют расширить функциональные возможности гравиметра «Чекан-АМ» при проведении съемки на борту самолета.
Работа проводилась при поддержке гранта Российского научного фонда (проект №14-29-00160).
Литература
1. Краснов, гироскопической стабилизации гравиметра / , , // Гироскопия и навигация№4. - С. 54-69.
2. Лопарев, коррекции системы гироскопической стабилизации авиационного гравиметра/ , // Сборник материалов XXII Санкт-Петербургской международной конференции по интегрированным навигационным системам. – 2015. – C. 207-210.
3. Лопарев, частотного подхода при синтезе нестационарных алгоритмов обработки навигационной информации / , , // Гироскопия и навигация. – 2011. - №3. - С. 115-132.
4. Степанов, частотно-временного подхода при решении нестационарных навигационных задач / , , // Материалы пленарного заседания 5-й Российской мультиконференции по проблемам управления. - СПб.: «ЦНИИ «Электроприбор», 2012. - С. 64-80.
5. Степанов, -временной подход к решению задач обработки навигационной информации / , , // Автоматика и телемеханика. – 2014. - №6. - С. 141-163.
(1991). Аспирант НИУ ИТМО, инженер АО «Концерн «ЦНИИ «Электроприбор» (С.-Петербург).
(1974). Кандидат технических наук, начальник сектора АО «Концерн «ЦНИИ «Электроприбор», доцент НИУ ИТМО (С.-Петербург).
