

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рис 6 |
Отработка единичного шага
Рассмотрим процесс отработки ШД единичного шага. Пусть в исходном состоянии ротор ЩД находится в положении, показанном на рис.6.
Снимаем напряжение управления с фазы 1 и подаем напряжение на фазу 2. Возникает вращающий момент (момент синхронизации), под действием которого ротор начинает вращаться в положительном направлении к фазе 2. Величина момента синхронизации определяется углом рассогласования θ между продольной осью ротора и осью поля (фазных выступов) статора
Рис. 7 |
![]() . (1)
. (1)
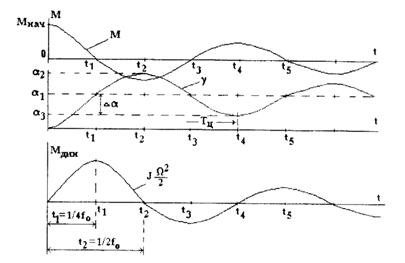
Угол α, отсчитываемый от оси фазного выступа 1 до оси ротора, начинает расти, рис 7.
Появляется динамический момент
 . (2)
. (2)
По мере приближения оси ротора к оси фазы 2 величина момента вращения уменьшается и в момент совпадения осей (момент времени t1) становится равной нулю. Угол поворота ротора равен α1
Однако в этот момент времени (t1) динамический момент достигает максимума и под его действием ротор проходит равновесное состояние и угол α становится больше α1. Появляется тормозной момент, стремящийся повернуть ротор в сторону фазного выступа 2. Ротор тормозится, динамический момент падает до нуля, угол достигает значения α2 (момент времени t2). Начинается движение ротора в обратную сторону. В момент времени t3 ротор находится в соосном положении с выступом фазы 2, однако, под действием динамического момента он по инерции проходит это положение и движется к фазному выступу 1. Если бы не было сил демпфирующих колебания и трения, то ротор вернулся бы в исходное положение. При наличии сил трения и электромагнитного демпфирования ротор отклоняется только до угла α3 (момент времени t4). Первый цикл колебаний ротора закончился.
В исходном состоянии для второго цикла ротор неподвижен, динамический момент равен нулю, на ротор действует вращающий момент по направлению к фазе 2, но величина его меньше, чем в начале первого цикла. Таким образом, процесс колебаний ротора продолжается до полного преобразования кинетической энергии ротора в потери. Внутреннее электромагнитное демпфирование колебаний ротора происходит за счет демпфирующего момента возникающего при протекании по обмоткам управления токов, вызванных ЭДС вращения. ЭДС вращения наводится переменной составляющей потока возбуждения, возникающей в результате изменения магнитного сопротивления при вращении ротора. Демпфирующий момент препятствует нарастанию угловой скорости ротора. Расчет демпфирующего момента:
 ,
,
где  - коэффициент внутреннего демпфирования, ψm - амплитуда изменения потокосцепления ротора с фазой статора в функции углового положения ротора, r- активное сопротивление фазы статора.
- коэффициент внутреннего демпфирования, ψm - амплитуда изменения потокосцепления ротора с фазой статора в функции углового положения ротора, r- активное сопротивление фазы статора.
Таким образом, уравнение движения ротора можно представить в виде
![]() . (4)
. (4)
Этим уравнением можно пользоваться при рассмотрении механических переходных процессов, когда электромагнитными процессами в обмотках статора пренебрегают.
Из диаграммы колебаний ротора (рис. 7) можно определить ряд параметров переходного режима:
. Т0 - период собственных колебаний. Собственная угловая частота колебаний ротора ШД: Ω0 = 2π/Т0, собственная частота колебаний: f0=1/Т0;
- N - число колебаний ротора;
- tp - время окончания переходного процесса.
Колебания ротора - основной недостаток шагового привода, ограничивающий его применение или существенно удорожающий привод из за борьбы с ними. В тех случаях, когда качания ротора недопустимы, применяют старт-стопный режим управления при отработке единичных шагов.
Рис. 8,а Рис. 8,6 |
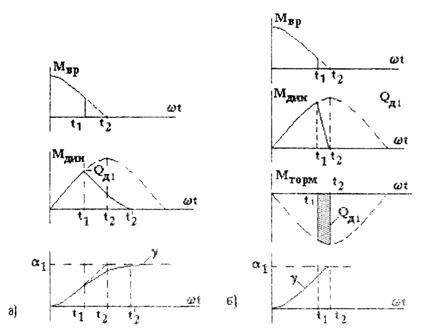
Старт-стопное управление. Старт-стопным называется такое управление ШД, при котором обеспечивается минимальная динамическая ошибка за счет использования избытка кинетической энергии ротора. Необходимо, чтобы энергия, запасенная ротором при разгоне, была полностью израсходована в процессе торможения. Торможение может быть естественным или принудительным. Рассмотрим старт-стопное управление с естественным торможением, см. диаграммы рис. 8,а.
При движении ротора ШД от фазы 1 к фазе 2 в момент времени t1; когда ротор находится в положении близком к углу α1, снимается напряжение управления с фазы 2 и ротор ШД далее движется по инерции. Момент времени t1 подбирается так, чтобы запаса кинетической энергии (величины динамического момента) хватило для окончания движения ротора ШД в соосное с фазой 2 положение. В момент времени t2,когда угол α=α1, вновь подается питание на фазу 2 для удержания ротора в равновесном относительно оси этой фазы положении.
Для сокращения времени регулирования, а также в случаях, когда естественное торможение не может ликвидировать качания ротора, применяют принудительное торможение. В момент времени t1, когда ротор находится в положении близком к углу α1, снимается напряжение управления с фазы 2 и вновь подается на фазу 1, создающую тормозной момент, рис. 8,6. Ротор резко тормозится. Когда ротор достигает симметричного положения относительно фазы 2, отключают тормозящую фазу 1 и вновь подключают фазу 2 для удержания ротора в положении равновесия.
Режимы работы шагового электродвигателя
В зависимости от частоты подачи импульсов управления различают следующие режимы работы ШД:
- статический - по одной из фаз протекает постоянный ток, создающий неподвижное в пространстве магнитное поле. Ротор ШД ориентирован по оси этой фазы и неподвижен;
- квазистатический - на фазы последовательно подаются импульсы напряжения управления, причем ротор успевает повернуться и остановиться к моменту подачи следующего импульса;
- установившийся - ротор ШД непрерывно вращается со скоростью, соответствующей частоте подачи импульсов управления;
- переходный - имеет место при пуске ШД, реверсе, торможении, переходе с одной частоты вращения на другую. Переходные режимы ШД сложны и определяются величинами электромагнитной и механической постоянных времени.
Рис 9 |
Картина движения ротора ШД в квазистатическом режиме представлена на рис. 9.
Основными показателями квазистатического режима являются: перерегулирование ∆θп, то есть максимальное отклонение от нового положения устойчивого равновесия ротора при переходном процессе, tзат - время затухания свободных колебаний ротора на одном шаге, Ω0 - собственная частота колебаний ротора.
Переходные процессы в шаговом электродвигателе описываются системой дифференциальных уравнений:
 ,
,
…………………………… (5)
 ,
,
 ,
,
где Uk - напряжения последовательно включаемых фаз; rk. омические сопротивления фаз; Ik - токи фаз; ψk - потокосцепления само - и взаимоиндукции фаз; Мmax максимальное значение момента вращения; θ - угол рассогласования осей ротора и поля фазы статора ШД; m1 - число фаз, Mст - статический момент сопротивления, ψmk - амплитуда изменения потокосцепления ротора с фазой статора в функции углового положения ротора.
В отличие от (4) момент внутреннего демпфирования не вводится непосредственно в уравнение равновесия моментов, а его действие учитывается через влияние ЭДС вращения на токи фаз.
Установившийся режим работы ЩД. При работе в установившемся режиме переключение напряжения фаз осуществляется при вращающемся роторе. При работе в установившемся режиме желательно, чтобы момент переключения фаз соответствовал достижению ротором оси включенной фазы (момент времени t1), когда момент вращения равен нулю, а динамический момент максимален, рис. 7. В этом случае наиболее полно используется энергия источника питания. Частота переключения фаз при этом f=T0/4=4∙f0. Максимальное рассогласование магнитных осей статора и ротора не превосходит одного полюсного деления. Движение ротора становится синхронным, без колебаний ротора. При частоте управляющих импульсов f=2∙f0 каждая последующая команда не вносит дополнительной энергии в систему, так как к моменту поступления очередной команды ротор ШД, находится в состоянии устойчивого равновесия. Такой режим работы ШД обеспечивает наименьшую динамическую погрешность привода. Поэтому эту частоту можно назвать оптимальной частотой для слабо нагруженных ШД.
Устойчивость работы ШД во многом зависит от соотношения между частотой управляющих импульсов fy и частотой свободных колебаний ротора f0. При fy=4∙f0 наблюдается синхронное вращение ротора, при f0<fy<4∙f0 вращение ротора сопровождается вынужденными колебаниями с частотой fy, амплитуда которых снижается с увеличением частоты управления.
Рис. 10 |
При резонансной частоте управляющих импульсов fy=f0 возникает резонанс и наблюдается быстрое возрастание амплитуды качаний ротора, которое может привести к нарушению периодичности движения ротора - выпадению из синхронизма. При fy<f0 каждый шаг ротора сопровождается свободными колебаниями.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
