

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Лекция №4
ШАГОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ
Дискретный разомкнутый электропривод с шаговым электродвигателем является синхронно-импульсным следящим электроприводом, сочетающим в себе возможности глубокого частотного, регулирования скорости с возможностями числового задания пути и надежной фиксации конечных координат. Шаговые электродвигатели (ШД) работают в комплекте с электронными коммутаторами, коммутатора состоит в переключении обмоток управления ШД с последовательностью и частотой, соответствующими заданной команде. При этом результирующий угол поворота ротора ШД строго соответствует числу переключений обмоток управления, направление вращения - порядку переключений, а частота вращения - частоте переключений. Дискретный шаговый привод очень хорошо сочетается с цифровыми управляющими машинами и программными устройствами. ШД находят применение там, где исполнительные органы устройств должны совершать строго дозированные перемет с фиксацией своего положения в конце движения.
Развитие систем ЧПУ создало широкие возможности да применения ШД для преобразования унитарного кода (последовательность импульсов) в пропорциональное перемещение механизма. Системы автоматического управления с ШД можно разделить на две группы:
- системы, в которых ШД преобразует унитарный код в фазомодулированный сигнал, например, устройства, в которых ШД вращает задающие сельсины, поворотные трансформаторы и т. д.;
- системы, в которых ШД использованы для привода исполнительного механизма непосредственно или через усилитель момента. К этим системам относятся приводы подач станков, индексирующие устройства счетчиков.
Ряд исследователей считают, что применение шаговых электродвигателей в электроприводах роботов ограничено трудностью обеспечения плавности движения схвата манипулятора и требуемых динамических характеристик. Однако, освоение методов старт-стопного управления, электрического дробления шага и новых алгоритмов точного формирования движения изменили взгляды на возможности ШД. Современные шаговые двигатели являются по сути синхронными двигателями без пусковой обмотки на роторе, что объясняется не асинхронным а частотным пуском шагового двигателя.
Преимущества шагового двигателя:
угол поворота ротора определяется числом импульсов, которые поданы на двигатель; двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны); прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу; возможность быстрого старта/остановки/реверсирования; высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников; однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи; возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора; может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов.
Недостатки шагового двигателя:
шаговым двигателем присуще явление резонанса - возможна потеря контроля положения ввиду работы без обратной связи; потребление энергии не уменьшается даже без нагрузки; затруднена работа на высоких скоростях; невысокая удельная мощность; относительно сложная схема управления.
Шаговые электродвигатели используются для приводов подачи фрезерных станков, токарных станков, в лентопротяжных механизмах, в электрогидравлических приводах роботов для вращения распределителя гидродвигателя, для управления положением штоков, затворов, сервоклапанов, дозаторов, вентилей, клапанов, заслонок, для дистанционного управления переключателями, телеметрическими и индикаторными приборами. Все специфические особенности ШД обусловлены исключительно импульсным характером сигнала, а не его конструктивной схемой.
Шаговые электродвигатели различаются по числу фаз, типу магнитной системы, способу возбуждения (управления), числу полюсов ротора. ШД обычно являются многофазными, многополюсными. Наибольшее распространение получили трех - и четырехфазные машины с числом пар полюсов р = 4…6. В зависимости от типа источника и устройства электронного коммутатора могут применяться следующие виды управления:
- потенциальное или импульсное;
- однополярное или разнополярное;
- симметричное или несимметричное.
При потенциальном управлении обмотки находятся под напряжением и по фазе течет ток до ее переключения, положение ротора фиксируется полем возбуждения обмоток. При импульсном управлении фаза включается на некоторое время, а затем отключается автоматически и двигатель часть каждого такта обесточен. Ротор ШД удерживается в заданном положении реактивным моментом или внешним фиксирующим устройством.
Шаговые электродвигатели могут быть с активным или пассивным ротором. Активный ротор - это ротор с постоянными магнитами.
Рис. 1 |
Простейшим является однофазный ШД с клювообразными полюсами и фиксацией ротора постоянными магнитами, рис. 1.
Пока обмотка ОВ обесточена, ротор ориентирован по оси полюсов из постоянных магнитов. При подаче на обмотку ОВ постоянного напряжения она создает магнитный поток примерно в два раза превышающий поток постоянных магнитов и ротор, имеющий полюсные выступы, поворачивается против часовой стрелки на угол 90°. При снятии напряжения управления с обмотки ОВ ротор утягивается постоянными магнитами и поворачивается еще на один шаг (90°). Двигатели указанного типа могут отрабатывать сигналы с частотой до 300Гц.
Недостаток таких ШД - невозможность реверса.
Простейшим реверсивным ШД является двухфазный двухполюсный двигатель, рис. 2.
Пусть в исходном положении напряжение подано на фазу В и ротор ориентирован по оси этой фазы. Если снять напряжение с фазы В и подать напряжение на фазу А рис. 2,б, то ротор повернется на угол 90° и будет ориентирован по оси фазы А. Однако, остается неопределенным направление вращения ротора: ротор может повернуться как по часовой стрелке, так и против. Этого недостатка лишены трехфазные ШД.
Рис. 2 |
Для однозначности направления вращения используется предварительное включение очередной фазы до момента отключения отработавшей фазы, рис. 2,в (симметричное управление) и рис. 2,г (несимметричное управление). Управление называют симметричным, если возбуждается одинаковое число обмоток, т. е. обмотки включаются парами. Если в последовательных тактах коммутации возбуждено разное число обмоток (например, две - одна - две …), то управление называется несимметричным. На рис. 2 показаны диаграммы при потенциальном управлении напряжением обмоток ШД, когда напряжение изменяется только при поступлении управляющих импульсов на переключение фаз. При импульсном управлении напряжением обмоток длительность импульсов напряжения меньше длительности периода поступления управляющих импульсов, то есть ШД часть времени каждого такта обесточен. В этом случае для исключения потерь информации в период пауз между импульсами тока фаз необходимо фиксировать ротор ШД внутренним реактивным моментом либо внешними фиксирующими устройствами. Диаграммы рис. 2 соответствуют разнополярному управлению напряжением на каждой фазе. Однополярное управление напряжением применяется при параллельном включении фаз, рис. 4.
Угол поворота вала ШД определяется по следующей формуле
 ,
,
где рп - число пар полюсов, m - число фаз ШД (число обмоток управления, пространственно смещенных одна относительно другой), n - число тактов в цикле, причем, n=m для симметричной коммутации и n=2m для несимметричной коммутации. Для симметричной разнополярной коммутации n = 2m.
Связь между необходимым числом тактов коммутации ШД и допустимой величиной момента нагрузки
![]() ,
,
где Мсин. макс - максимальное значение момента синхронизации (вращающего момента).
Магнитоэлектрические ШД выполняют с шагом порядка 9…15°. Для повышения точности отработки заданного перемещения применяется электрическое дробление шага.
Параметрический шаговый электродвигатель. Электродвигатели на меньший шаг (1…3°) выполняют параметрическими с электрической редукцией шага. Эскиз конструкции параметрического ШД представлен на рис. 3.
Рис. 3 |
Статор и ротор ШД набирают из листов электротехнической стали. Статор представленного ШД имеет восемь фазных выступов (m=4), в которых по расточке статора выштампованы пазы с общим числом зубцовых делений по окружности Nc=28. Ротор из магнитомягкого материала имеет равномерно по окружности зубцы, число которых отличается от Nc на два: Zp=30. При поочередном включении фаз статора поле статора каждый раз поворачивается на угол 45°, а ротор на угол 3°. Коэффициент электрической редукции kэр = Zp/2. При равномерном вращении поля статора в этом же отношении снижается частота вращения ротора ШД.
Рис. 4. |
Силовые схемы шагового электропривода. Силовая схема питания фаз ШД при однополярном управлении и параллельном включении фаз с транзисторными ключами представлена на рис. 4.
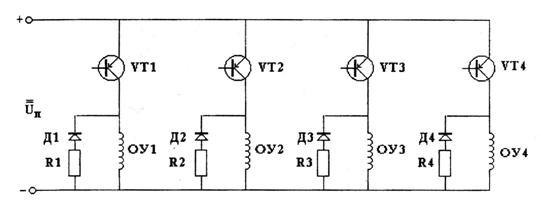
Схема питания фаз с помощью тиристорного коммутатора с искусственной коммутацией представлена на рис. 5.
Рис. 5 |
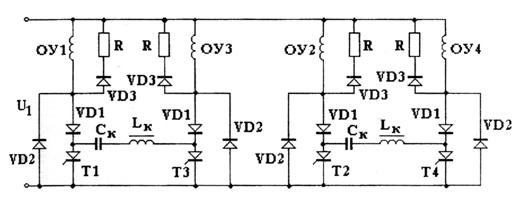
Тиристоры Т1…Т4 обеспечивают парную коммутацию обмоток ЩД, при которой в каждый момент времени включены две фазы из четырех. Тиристоры Т1 и ТЗ, а также, Т2 и Т4 образуют схемы двух триггеров, в которых переключение тиристоров производится с помощью колебательных контуров Lк Ск и диодов VD1 - VDЗ. Предположим, что тиристор Т1 открыт и запитана обмотка управления ОУ1.Конденсатор Ск заряжен до напряжения источника питания с плюсом на правой обкладке. Когда поступит управляющий импульс на тиристор ТЗ, он откроется и по обмотке управления ОУЗ начнет протекать ток. В то же время по цепи + Ск - Lк - ТЗ - Т1 - - Ск происходит быстрый перезаряд конденсатора и при смене знака тока через тиристор Т1 последний закроется. К концу перезаряда конденсатора плюсовой станет его левая обкладка. Схема готова к новому шагу управления - отключению ОУЗ и включению ОУ1. Аналогично работает второй триггер на тиристорах Т2 - Т4.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
