

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Частота управляющих импульсов fy однозначно определяет частоту вращения ротора ШД ![]() рад/с. Статические механические характеристики ШД представлены на рис. 10.
рад/с. Статические механические характеристики ШД представлены на рис. 10.
Ограничение рабочей зоны механических характеристик с увеличением частоты следования управляющих импульсов обусловлено следующим. С увеличением частоты происходит уменьшение вращающего момента ШД, что объясняется в основном двумя факторами: действием демпфирующего момента от ЭДС вращения и тем, что ЭДС самоиндукции в обмотках управления становится соизмеримой с напряжением источника питания и ток обмоток управления за время такта не успевает нарасти до установившегося значения, что снижает результирующий поток фаз обмотки статора. Снижение синхронизирующего момента тем больше, чем выше значение электромагнитной постоянной времени обмоток управления.
Максимальную частоту импульсов, при которой еще возможен режим без выпадения ротора из синхронизма (потери шагов), называют частотой приемистости fnp. Предельные динамические характеристики ШД представляют собой зависимости частоты приемистости от момента сопротивления и момента инерции на валу двигателя, рис. 11.
Рис. 11. а) характеристики ШД 2-3, б) характеристики ШДА 3-3 |

Если цель состоит в том, чтобы обеспечить работу ротора в возможно более широком диапазоне скоростей и частот, то следует выбирать меньшие значения момента нагрузки. При средних значениях параметров можно рекомендовать для нагрузки типа сухого трения момент (0,2…0,4)∙Мm. При работе на активную нагрузку момент нагрузки не следует принимать более 0,2∙Мm.
При работе в установившемся режиме ШД может иметь достаточно высокий КПД, достигающий 50%.
Пуск. При пуске ШД в ход наиболее легкие условия разгона имеют место при  , то есть при положительном динамическом моменте.
, то есть при положительном динамическом моменте.
Торможение. Чтобы затормозить ротор нужно прекратить подачу управляющих импульсов, оставив одну фазу под током. Ротор колеблется около точки устойчивого равновесия. Процесс торможения может сопровождаться выбегом ротора, то есть потерей информации, так как ротор отрабатывает избыточное количество шагов. Для торможения без колебаний нужно плавно снижать fy, поддерживая М<0. Предельная частота импульсов при торможении и реверсе на 30…40% ниже, чем при пуске ШД.
Реверс. При реверсировании шаговый электродвигатель может потерять несколько шагов. Реверс с потерей шагов имеет место в тех случаях, когда запасенная ротором энергия не успевает израсходоваться на преодоление внешних и внутренних сил сопротивления за время первых одного - двух тактов после подачи команды на реверс, когда ротор вращается против поля статора. Последнее зависит от положения ротора в момент начала реверса.
Частота управляющих импульсов, при которой ШД после изменения направления движения магнитного поля на обратное реверсируется с сохранением устойчивости и без потери информации, называется частотой реверса.
Силовые схемы ШД с форсированием переходных процессов
Различие силовых схем для управления ШД определяется способом формирования процессов нарастания и спада тока в фазе. Возможны три способа форсирования переходных процессов. В первом способе на обмотки ШД подают повышенное напряжение, а для ограничения тока на допустимом уровне последовательно с обмоткой включают резистор. Этот способ применяется редко из-за низкого КПД.
Рис. 12 |

Во втором способе к обмотке в первые моменты времени прикладывается повышенное напряжение для форсировки нарастания тока. Особенностью большинства ШД является питание однополярными импульсами тока. Силовая схема для данного исполнения представлена на рис. 12. Регулирование напряжения на фазах ШД обеспечивается формированием процессов нарастания и спада тока в моменты коммутации фаз. Управляющий сигнал поступает на вход распределителя импульсов и на одновибратор ОВ. Одновибратор формирует импульс длительностью tф отпирающий на это время ключ К4.
Распределитель импульсов в соответствии с алгоритмом управления открывает один из транзисторов К1…КЗ. На фазу ШД, подключаемую к источнику питания, для форсированного нарастания тока фазы подается повышенное напряжение U1. Ток фазы нарастает до номинального значения. По окончании времени форсировки tф транзистор К4 закрывается и к обмотке ШД прикладывается напряжение U2, величина которого обеспечивает протекание номинального тока фазы. Диод VD1 предотвращает короткое замыкание источника U1 при включении К4. После снятия с ключа (К1…КЗ) управляющего напряжения соответствующая фаза отключается от источника питания. Запас электромагнитной энергии фазы рекуперируется через диоды и РЭ в источник питания. Для ускорения процесса отключения обмотки к ней может быть приложено обратное форсирующее напряжение. Временные диаграммы, иллюстрирующие процессы импульсного форсирования, представлены на рис. 12,б.
Третий способ форсирования связан с подачей на обмотку форсированного напряжения постоянно и поддержанием заданного значения тока с помощью датчика тока. Наибольшее распространение получила стабилизация тока на заданном уровне с использованием широтно-импульсного регулятора (ШИР). Схема питания фазы и диаграмма тока и напряжения представлена на рис. 13. При получении сигнала, разрешающего включение фазы, открываются транзисторы VI и V4 и ток фазы нарастает до imax. Время нарастания Тн зависит от индуктивности фазы и напряжения источника питания. После того, как ток фазы достигает значения imax, ключ VI размыкается и ток фазы спадает по цепи VI - V4 - R до значения imin, после чего VI открывается и вновь ток фазы растет. Таким образом, в ШИР тока возникает автоколебательный процесс, в результате которого ток поддерживается постоянным.
Рис. 13 |
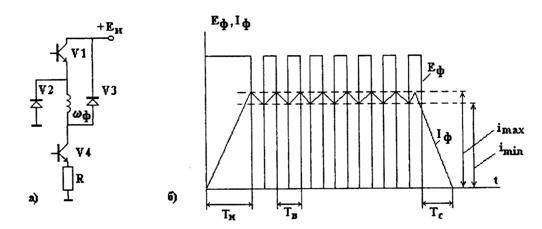
Период переключения Тв зависит от постоянной времени фазы ШД и напряжения на фазе. Отключение фазы осуществляется размыканием ключей V1, V4. Разряд запасенной в индуктивности фазы энергии осуществляется за время Тс по цепи через вентили V2, V3 и источник энергии.
Коэффициент полезного действия ШД при импульсном форсировании напряжения достигает 0,8.
Электрическое дробление шага.
Заложенная в конструкцию ШД дискретность перемещений сдерживала применение этих двигателей при реализации равномерных медленных движений. Принцип электрического дробления шага, при сохранении основной структуры импульсного управления дискретным электроприводом, позволяет увеличить до любого требуемого значения число электрических состояний системы и обеспечить глубокое электрическое редуцирование шага и скорости движения, при этом устраняются вынужденные колебания ротора. Принцип электрического дробления шага осуществляется путем одновременного питания двух фаз, при этом ротор ШД устанавливается по оси суммарного потока двух фаз. В принципе число одновременно возбуждаемых смежных фаз не должно превышать m/2 при четном и (m+1)/2 при нечетном числе фаз. Метод электрического дробления шага сочетает шаговый принцип перемещения поля статора и фиксацию его в требуемом положении с плавным переходом ротора из одного пространственного положения в другое. Метод основан на введении дополнительной модуляции фазных токов внутри основного периода коммутации. При построении схем управления ШД с дроблением шага получили распространение два основных принципа:
- двухчастотное управление, при котором в качестве импульсного модулятора используется распределитель импульсов;
- управление с промежуточным преобразованием кода, вырабатываемого распределителем импульсов, в аналоговый управляющий сигнал, подаваемый на вход регуляторов напряжения.
Рис. 14 |
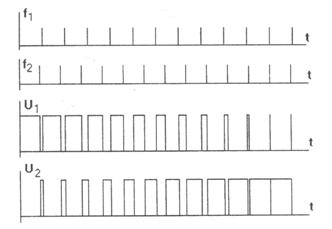
На рис. 14 приведена диаграмма формирования напряжений двух фаз ШД при двухчастотном управлении.
От высокочастотного генератора напряжение подается на делители частоты, которые в соответствие с заданием вырабатывают управляющие сигналы с частотой f1 и f2. Формирование фазных напряжений U1 и U2 осуществляется воздействием этих сигналов на входы электронного коммутатора, выполняющего функции электрического дифференциала и суммирующего эти два информационных потока. Меняя соотношение частот - регулируем скорость прохождения ротором двигателя единичного шага. При равенстве частот ротор неподвижен и фиксируется в любой точке в пределах выполняемого шага, положение которой зависит от фазового сдвига сигналов f1 и f2.
Передаточная функция шагового электродвигателя
Шаговый электродвигатель при движении на единичном шаге описывается как звено системы автоматического управления передаточной функцией
 , (12.3)
, (12.3)
где U(p)- напряжение, подаваемое на фазу ШД;
α(р) - угол поворота ротора;
Тэ, Твт, Тм - постоянные времени: электромагнитная, демпфирования вязким трением, механическая;
kшд - коэффициент передачи ШД по напряжению.
 Готовые шаговые модули
Готовые шаговые модули
Предлагаются шаговые модули так называемой MDrive серии. С помощью данных устройств Вы можете покрыть диапазон моментов начиная от 0,1 Нм и заканчивая 10,34 Нм.
Шаговый модуль MDrive объединяет в одном корпусе и шаговый двигатель, и силовой привод. Подобная интеграция дает несколько преимуществ: отпадает необходимость в дополнительных кабелях, решается проблема наводок, резко сокращается место для монтажа. Все это приводит к снижению размер и стоимость Вашей системы позиционирования.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
