
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
24+18,36 42,36 j=0,065

 j
j![]() =275.10-5
=275.10-5
![]()
![]()
![]()
![]() ωn2 =190,7
ωn2 =190,7
0,126+0,065 ![]()
Рис.6, г.
п’ятимасову (рис.6, б) перетворенню підлягає парціальна двомасова система парціальною частотою коливань ωn2=19611. Після її перетворення утворилась вільна пружна ділянка з податливістю 0,348 ![]() . Податливість цієї ділянки не впливає на динаміку системи, тому вона відкинута.
. Податливість цієї ділянки не впливає на динаміку системи, тому вона відкинута.
При подальшому зменшенні числа ступенів свободи знову обчислюють ωnк і повторюють спрощення, якщо ωnк >> ωmax (рис.6, в, г).
Для визначення власних частот тримасової системи можна користуватись рівнянням, наведеним в [7]:
ωо2[j1 j2 j3 ω4о - ![]() [(j1 j2 + j1 j3) C2:3 + (j2 j3 + j1 j3) C1:2 ] ω2о + С1:2 * С1:3 * (j1+j2+j3)]=0
[(j1 j2 + j1 j3) C2:3 + (j2 j3 + j1 j3) C1:2 ] ω2о + С1:2 * С1:3 * (j1+j2+j3)]=0
Один з коренів цього рівняння дорівнює нулю, що відповідає обертанню вала як жорсткого тіла без скручення. Два інших корені знаходять із рівняння у фігурних дужках, підставивши в нього значення параметрів тримасової системи, що зображена на рис.6, г:
0,82 * 0,065*0,126ω4о -[ (0,082*0,065+0,082*0,126)+ +
(0,082*0,065+0,082*0,126)+ +![]() (0,065*0,126+0,082*0,126)] ω2о*
(0,065*0,126+0,082*0,126)] ω2о* * *(0,082+0,065+0,126)=0.
* *(0,082+0,065+0,126)=0.
Звідси ωо1=218 Гц і ωо2= 440,6 Гц.
Розглянутий метод спрощення багатомасових крутильних систем широко застосовують в розрахунковій практиці, однак він вимагає значних витрат часу. Розрахунки можуть бути автоматизовані на основі алгоритму та програми, які наведені в [6]. При використанні малих ЕОМ може бути використаний алгоритм, наведений в [11].
2. Визначають співвідношення амплітуд коливань інерційних мас в спрощених дво - і тримасових моделях приводу.
Для двомасової системи [7] - ![]() = -
= - ![]() , де А1 і А2 - амплітуди коливань першої і другої мас відповідно.
, де А1 і А2 - амплітуди коливань першої і другої мас відповідно.
Амплітуду А1 приймають рівною одиниці і знаходять відносні амплітуди власних коливань системи:
![]() =а1 =1;
=а1 =1; ![]() = а2 ; …..;
= а2 ; …..; ![]() =а1; ….
=а1; ….![]() = аn.
= аn.
Для кожної частоти власних коливань ωо значення амплітуди коливань а зображують графічно по довжині еквівалентної системи у вигляді ординат (рис.7). З’єднують прямі кінці ординат між масами і одержують ламану лінію, яку називають формою коливань. Точки перетину форми коливань з віссю еквівалентного валу утворюють вузли коливань, які при коливаннях системи залишаються нерухомими. Так як в еквівалентній системі відстань між масами пропорційна податливості відповідних ділянок реального валу, то тангенси кутів нахилу лінії, яка зображує форму коливань даної власної частоти, пропорційні пружним обертовим моментам на ділянках валу і дають наочну уяву про порівняльну напруженість цих ділянок.

![]()
![]()
![]() 0,11 0,16
0,11 0,16
 4,36
4,36
![]()
![]()
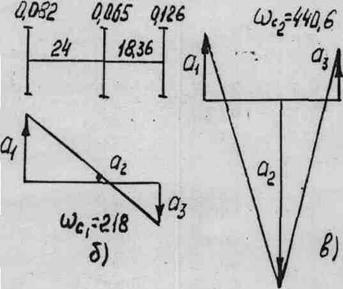
Рис.7. Форми коливань системи приводу при nшп. = 2000 об/хв.
На рис.7 наведені розраховані для прикладу, що розглядається (nшп. = 2000 об/хв), форми коливань системи приводу при двомасовій (а) та тримасовій (б) моделях.
Амплітуди коливань визначені по виразах [7], одержаних із системи диференційних рівнянь руху системи:
А1 = ![]() ; А3 =
; А3 = ![]()
де С1:2 і С2:3 – жорсткості ділянок валопроводу між інерційними масами; ωо - частота власних обертальних коливань пружної системи приводу.
Відносні амплітуди коливань у тримасовій системі дорівнюють:
![]() а2
а2 ![]() ;
;
![]() = а3
= а3 ![]() .
.
де ωоі2 – частота власних крутильних коливань системи, ![]() = 1, … , S; S – кількість частот власних коливань, що дорівнює кількості пружних елементів системи (для нашого випадку S = 2).
= 1, … , S; S – кількість частот власних коливань, що дорівнює кількості пружних елементів системи (для нашого випадку S = 2).
Підставивши параметри системи, що розглядається, у вирази для визначення відносних амплітуд, одержимо:
- для двомасової моделі (рис.7, а)
 а2 =
а2 =  = -0,69
= -0,69
- для тримасової моделі при ωо1 = 218 Гц (рис.7, б)
 а2 =
а2 = = 0,064.
= 0,064.
 а3 =
а3 =  = -0,65.
= -0,65.
- для тримасової моделі при ωо2 = 440,6 Гц
 а2 =
а2 = =2,82.
=2,82.
 а3 =
а3 =  = 0,81.
= 0,81.
Меншому додатньому значенню = 218 Гц відповідає одновузлова форма обертальних коливань, а більшому значенню двовузлова.
3. Визначають максимальні значення моментів, що виникають в приводі при заданих частотах обертання в момент запуску двигуна.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
