


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Менять шаг интегрирования ![]() в процессе счета можно, но далеко не всегда нас интересует детальное поведение решения в пределах пограничного слоя. В таких случаях можно брать
в процессе счета можно, но далеко не всегда нас интересует детальное поведение решения в пределах пограничного слоя. В таких случаях можно брать ![]() и по неявной схеме проходить пограничный слой за один шаг по времени.
и по неявной схеме проходить пограничный слой за один шаг по времени.
Посмотрим еще, что будет происходить в неявной схеме вблизи точки B (или С) на примере уравнения Ван дер Поля (14), (16). Имеем:
![]()
 ,
,
![]() .
.
Вблизи точки B с координатами {xn, yn} имеем
 , т. е. кубическое относительно искомого xn+1 уравнение, решения которого изображены на рис. 1.8.
, т. е. кубическое относительно искомого xn+1 уравнение, решения которого изображены на рис. 1.8.
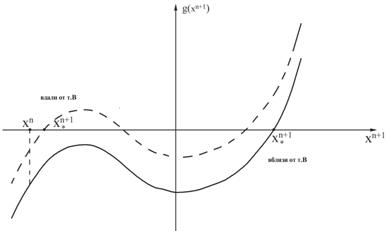
Рис. 1.8. К алгоритму расчёта уравнения Ван дер Поля по неявной схеме Эйлера
Выбор в итерационном методе в качестве начального приближения {xn, yn} при решении этого кубического уравнения может не дать сходимости. Это следствие вырождения исходной системы (14), и за этим надо следить (варьируя ![]() и т. п.). Например, задается некоторая точность сходимости итерационного процесса и минимально (m) и максимально (M) допустимые числа итераций. Если за M итераций процесс не сходится,
и т. п.). Например, задается некоторая точность сходимости итерационного процесса и минимально (m) и максимально (M) допустимые числа итераций. Если за M итераций процесс не сходится, ![]() уменьшают, если сходится за меньшее, чем m число итераций, то
уменьшают, если сходится за меньшее, чем m число итераций, то ![]() увеличивают и т. д.
увеличивают и т. д.
2.3. Одношаговые методы типа Рунге–Кутты
2.3.1. Алгоритм
Перейдем к общему случаю системы (18). Одношаговые методы типа Рунге–Кутты имеют вид
 (21)
(21)
В дальнейшем для описания конкретных вариантов метода будем пользоваться таблицей Бутчера
Для явных схем Рунге–Кутты L<k, и таблица Бутчера выглядит следующим образом:
В этом случае для расчёта vn+1 по vn в соответствии с (21) имеем простые рекуррентные соотношения:
![]()
– предиктор,
![]() (22)
(22)
– первый корректор и т. д.
“Полуявные” или “диагонально неявные” схемы Рунге–Кутты отличаются от явных наличием ненулевых элементов на главной диагонали таблицы Бутчера (L≤k):
В этом случае на каждом шаге по времени последовательно решаются нелинейные системы
![]() ,
,
![]() и т. д., например, методом Ньютона
и т. д., например, методом Ньютона
![]()
![]()
с неким начальным значением ![]() , например,
, например, ![]() .
.
В общем случае (L=K), обозначая r = { r1,…,rk} = {r11,…,r1j, r21,…,r2j, rk1,…,rkj}, имеем еще более громоздкую нелинейную систему
R(r) = 0 , где R = { R1 , R2 , ...,Rk}
и итерационный процесс для ее решения
2.3.2. Аппроксимация
Параметры схемы (неопределенные пока коэффициенты a1,…,ak, c1,…,ck, b11,…,b1k,…,bk1,…,bkk), конечно, не произвольны. Прежде всего, их (все или только часть) находят из условий аппроксимации, получаемых из разложения (21) в точке t=tn или t=tn+1 в ряд Тейлора с учетом (18) и его следствий
vt=f(t,v), ![]()
(т. е. рассматривая аппроксимацию на решениях (18)).
Поскольку в (21) при к стоит множитель ![]() , то в разложении правой части (21) нужно удерживать на один член ряда Тейлора меньше, чем в левой. Индекс n будем опускать. Итак, левая часть (21):
, то в разложении правой части (21) нужно удерживать на один член ряда Тейлора меньше, чем в левой. Индекс n будем опускать. Итак, левая часть (21):
![]() Далее:
Далее:
 Если коэффициенты ak выбирать таким образом, чтобы
Если коэффициенты ak выбирать таким образом, чтобы
![]() , (23)
, (23)
то  . Подставляя эти разложения в (21) и группируя члены при одинаковых степенях
. Подставляя эти разложения в (21) и группируя члены при одинаковых степенях ![]() , получим (после деления на
, получим (после деления на ![]() )
)

Очевидно, что при выполнении условия ![]() будем иметь первый порядок аппроксимации, при
будем иметь первый порядок аппроксимации, при  – второй порядок аппроксимации и т. д. До четвертого порядка аппроксимации включительно эти условия имеют вид:
– второй порядок аппроксимации и т. д. До четвертого порядка аппроксимации включительно эти условия имеют вид:
![]() (24)
(24)
(вместе с (23) обеспечивает первый порядок аппроксимации),
![]() (25)
(25)
(вместе с (23),(24) обеспечивает 2-й порядок аппроксимации),
![]() (26)
(26)
(условия третьего порядка аппроксимации вместе с (23)-(25)),
![]()
![]() (27)
(27)
 .
.
(условия четвертого порядка аппроксимации вместе с (23)-(26)). Уравнения (23)-(27) составляют относительно неопределенных коэффициентов некоторую нелинейную систему. Очевидно, что привлекаемое число условий аппроксимации (т. е. порядок точности схемы р при выполнении соответствующих условий гладкости) должно быть меньше числа отличных от нуля коэффициентов в (21), и соответствующая система должна быть разрешима. В частности, для явных схем ![]() , а для общих неявных схем
, а для общих неявных схем ![]() .
.
2.3.3. Устойчивость
Конечно из того, что (21) при ![]() стремится к (18) еще не следует, что их решения будут сближаться. Как известно, для сходимости, по крайней мере, в линейном случае (
стремится к (18) еще не следует, что их решения будут сближаться. Как известно, для сходимости, по крайней мере, в линейном случае (![]() ), необходима еще устойчивость разностной схемы. А поскольку в линейном случае система (18) переходит в совокупность простейших уравнений типа (1) (только
), необходима еще устойчивость разностной схемы. А поскольку в линейном случае система (18) переходит в совокупность простейших уравнений типа (1) (только ![]() может быть и комплексным, т. е.
может быть и комплексным, т. е. ![]() ), при анализе устойчивости можно ограничиться изучением (1). Чтобы не погрязнуть в громоздких выкладках и иметь возможность графического представления некоторых результатов ограничимся также случаем K=2 в (21). Существа дела это не меняет, а для учебных целей вполне достаточно.
), при анализе устойчивости можно ограничиться изучением (1). Чтобы не погрязнуть в громоздких выкладках и иметь возможность графического представления некоторых результатов ограничимся также случаем K=2 в (21). Существа дела это не меняет, а для учебных целей вполне достаточно.
Итак, в случае модельного уравнения ![]() для обеспечения 2-го порядка аппроксимации из (23)-(25) имеем:
для обеспечения 2-го порядка аппроксимации из (23)-(25) имеем:
 (28)
(28)
Откуда
 , (29) т. е. четыре коэффициента
, (29) т. е. четыре коэффициента ![]() произвольны, а остальные четыре коэффициента определяются соотношениями (28),(29) (при условии не равенства нулю знаменателя в (29)).
произвольны, а остальные четыре коэффициента определяются соотношениями (28),(29) (при условии не равенства нулю знаменателя в (29)).
Из (26) с учетом (23),(29) имеем для схем 3-го порядка
3 (b11+ b22) – 1 – 6 (b11b22 – b12b21) = 0,
3[(b11+b11)+(b21 +b21)]–6(b22 +b21)(b11 +b12)–2 = 0. (30)
Для полуявных схем (b12=0) (30) определяет однопараметрическое семейство схем третьего порядка аппроксимации с коэффициентами
b21 =1/[3(1– 2b11)], b22 =(1–3b11)/[(1 –2b11)], b11![]() 1/2, (31)
1/2, (31)
а на четвертый порядок не хватает свободных коэффициентов.
Полагая далее ![]() ,
,  , получим из (22):
, получим из (22):

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
