


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 (40)
(40)
Две полуявные (с неявными предикторами и корректорами) схемы третьего порядка, не L-устойчивые, немонотонные, A-устойчивые:
1) точка B1 (схема Розенброка)
 (41)
(41)
2) точка B2, для которой
 (42)
(42)
Основная гипотеза, принимаемая здесь и в дальнейшем при анализе разностных схем: точкам в пространстве неопределенных коэффициентов {bk1}, которые близки между собой (в смысле расстояния, например, в евклидовой метрике), соответствуют схемы, близкие по своим свойствам (точности, устойчивости и т. п.).
2.4. Линейные многошаговые схемы (методы типа Адамса).
2.4.1. Алгоритм и аппроксимация
Используя, как и в разделе 1.3, метод неопределенных коэффициентов и записывая линейную комбинацию вектор-функций v и правых частей f в некоторой последовательности равноотстоящих точек tn,tn+1,..., tn+k (t = tn+kt – tn+k = const), для линейных многошаговых методов получим следующее разностное выражение:
![]() (43)
(43)
Из-за однородности (43), коэффициент при искомом значении vn+k можно выбрать единичным:
аK=1 (44)
Неопределенные коэффициенты ak, bk (k=0,...,K) из разложения (43) в ряд Тейлора в точке tn+k (или tn) связаны условиями аппроксимации (на решениях (18) ):
![]() ,
, ![]() (45)
(45)
(обеспечивают первый порядок аппроксимации),
![]() (46)
(46)
(обеспечивает второй порядок аппроксимации вместе с (45)),
…
![]() (47)
(47)
(обеспечивает n–ый порядок аппроксимации на решениях (18) вместе с предшествующими условиями).
Схемы первого порядка аппроксимации малоинтересны, поэтому в дальнейшем будем рассматривать схемы второго или более высокого порядка точности. Если с учетом нормировки (44) и условий аппроксимации второго порядка точности (45), (46) исключить, например,
 ,
,
 ,
,
 .
.
то оставшиеся свободными коэффициенты (если позволяет выбранное K>2), можно принять за линейное пространство размерности 2(K–1), например, с евклидовой метрикой, и каждой точке в этом пространстве будет соответствовать некоторая разностная схема второго порядка точности, а условия более высокого порядка аппроксимации ((47) при n=3 и т. д.) после исключения в них ak, ak–1, bk, bk–1, являясь относительно оставшихся свободными коэффициентов ak, bk (k=0,…,K–2) линейными уравнениями

 ,
,
образуют в этом пространстве соответствующую гиперплоскость схем третьего порядка аппроксимации. На пересечении двух таких гиперплоскостей ((47) при n=3 и n=4) будут расположены схемы с четвертым порядком аппроксимации и т. д., пока мы не исчерпаем все возможности для выбранного K, т. е. пока не найдем единственную схему с наиболее высоким (для данного K) порядком аппроксимации (одну из точек в этом пространстве).
В частности, при K=2 имеем:
a2=1, a1=–1–a0,
b2=(1+a0 +2b0) /2, b1=(1–3a0 –4b0) /2, (48)
где a0 и b0 произвольны для схем второго порядка аппроксимации.
Условие третьего порядка аппроксимации дает прямую в плоскости {a0, b0} с уравнением
5a0 + 12b0 + 1=0,
а единственной схемой четвертого порядка аппроксимации будет точка на этой прямой с координатами:
a0=–1, b0=1/3. (49)
2.4.2. Устойчивость
Как уже отмечалось, одной аппроксимации недостаточно для сходимости решений (43) к решениям исходной дифференциальной задачи даже в линейном случае (7). Необходимо еще обеспечить устойчивость разностных схем (43). Для одного линейного уравнения, полагая f=lv из (43) получим
 . (50)
. (50)
Устойчивость разностных схем (50) будем исследовать на специальных решениях вида vn=qn. Тогда для определения q имеем многочлен устойчивости степени K и уравнение
 ,
,
корни которого qj, j=1,2,...,K (действительные или комплексные, в зависимости от s, ak, bk) должны удовлетворять условиям устойчивости
|q (s) | < 1, j=1,...,K. (51)
Если в плоскости {Re s, Im s} область устойчивости, определяемая неравенствами (51), включает всю левую полуплоскость (т. е. (51) выполняется для всех s с Re s<0), имеем A-устойчивую схему. Если эта область включает в себя заштрихованную на рис. 1.11А или 1.11Б часть плоскости {Re s, Im s }, имеем жестко устойчивую схему. Если
![]() |q (s) |=0, j=1,2,...,K, (52)
|q (s) |=0, j=1,2,...,K, (52)
то схема будет L-устойчивой.
Для действительных s и qj(s) условия устойчивости схемы будут иметь вид
–1<qj(s)<1.
Если это условие выполняется для всех s: –¥<s<0, то схема A-устойчива, если выполняется (52), то она L-устойчива.
2.4.3. Примеры линейных многошаговых схем
Для случая K=2 с учетом (48),(50) имеем
vn+2=a1vn+1 + a0 vn, q2–a1q–a0=0.
Отсюда
![]() ,
, ![]() ,
,
где
![]() ,
,
![]() .
.
Рис. 1.13. Линейные многошаговые схемы в плоскости неопределённых коэффициентов (K=2) |
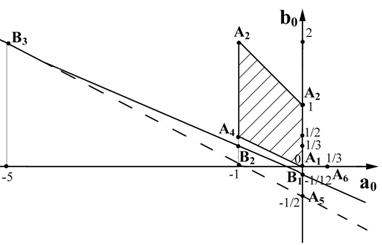
Условия |q1(s, a0, b0)|≤1, |q2(s, a0, b0)|≤1 ограничивают область A-устойчивых схем. На рис. 1.13 эта область в плоскости свободных коэффициентов {a0, b0 } заштрихована (четырехугольник A1, A2, A3, A4). Сплошная прямая B1B2 – множество схем с третьим порядком аппроксимации. Как видно, среди них нет A-устойчивых. Точка B2 на этой прямой – единственная в этом случае схема четвертого порядка аппроксимации (49). И в самом общем случае доказано (теорема Дальквиста), что линейных многошаговых A-устойчивых схем с порядком аппроксимации выше второго не существует.
Точка A6 с координатами a0=1/3, b0=0 (53)
– единственная в этом случае L-устойчивая схема (схема Куртиса–Хиршфельдера). Область жестко устойчивых схем, очевидно, содержит внутри себя множество A-устойчивых схем. В частности, схема, соответствующая точке A, является жестко устойчивой.
Точка A1 с коэффициентами
a0=b0=0, (54)
т. е. одношаговая линейная схема (метод трапеций), из числа A-устойчивых схем является оптимальной в том смысле, что она среди других A-устойчивых схем при K=2 ближе всего расположена и к L-устойчивой схеме (точке A6), и к схемам 3–го порядка точности (наиболее точная из A-устойчивых схем).
Отметим еще схему третьего порядка точности, соответствующую точке B1. Она является жестко устойчивой и наиболее близка к множеству A-устойчивых схем. Для этой схемы
a0=0, b0=– 1/12. (55)
Явным схемам на рис. 1.13 соответствует штриховая прямая. В частности, точка A5 с коэффициентами
a0=0, и=–1/2 (56)
– явная схема Адамса. Все явные схемы, как видно, не являются A-устойчивыми. А в целом, семейство линейных многошаговых схем существенно беднее схем типа Рунге – Кутты.
2.5. Схемы для продолженных систем (схемы Обрешкова).
2.5.1. Алгоритм и аппроксимация
Лучшие черты методов Рунге–Кутты и линейных многошаговых методов сочетают схемы для продолженной системы (19) или линейные многошаговые схемы, использованием 2-й (схемы Обрешкова) и более высоких производных
vtt(t, v) = ft = ¶f/¶t + fv f, (57)
Добавляя в (43) линейную комбинацию вторых производных vtt с дополнительными неопределенными коэффициентами сk, получим для этих схем (aK=1)
или, что то же
(58)
Из начальных условий в (18) и из (57) видно, что vtt(0,v0) фактически можно считать известным.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
