

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
где Cmn = Cijkl.
Таким образом матрицу Cijkl можно представить в виде аналогичной ей матрице с двухиндексным обозначением Cmn, каждая из компонент тензора Cmn характеризует связь между определенными компонентами напряжений и деформаций. Физический смысл компонент коэффициентов упругости Cmn определяется характером взаимосвязи между действующим напряжением и деформацией. Это схематически показано на рис. 2, на котором стрелками показано направление приложенного напряжения, а пунктиром – вызванные ими деформации.
Компоненты С11, С22, С33 связывают нормальные (растягивающие или сжимающие) напряжения с параллельными им деформациями продольного удлинения по трем возможным направлениям (рис. 2 а).
Компоненты С12, С13, С23, С21, С31, С32 характеризуют связь между нормальным напряжением и деформацией поперечного сжатия (рис. 2 б).
|
|
|
|
|
|
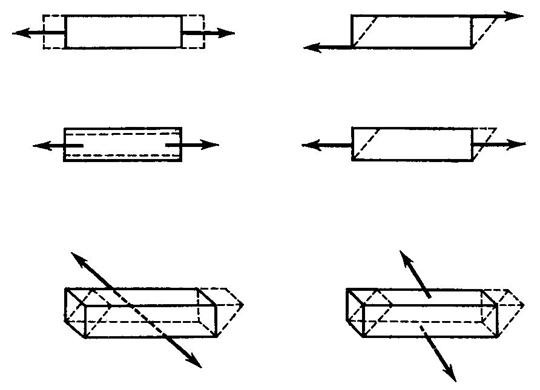
Рис. 2. Взаимосвязь коэффициентов упругости Сijkl
со схемой напряженного состояния.
(Стрелками показаны направления приложенного напряжения,
пунктиром – вызванные ими деформации)
Компоненты С44, С55, С66 связывают напряжение сдвига (касательные) с деформацией сдвига параллельно приложенному напряжению (рис. 2 в).
Компоненты С24, С26, С34, С35, С15, С16 связывают нормальные растягивающие напряжения с деформациями сдвига в плоскости параллельной напряжению (рис. 2 г).
Компоненты С14, С25, С36, С41 связывают нормальные напряжения с деформациями сдвига в плоскостях параллельных приложенному напряжению, при этом направление сдвига перпендикулярно направлению напряжения (рис. 2 д).
Компоненты С45, С46, С56, С54, С64 связывают напряжения сдвига с деформациями сдвига в перпендикулярном направлении (рис. 2 е).
Матрица коэффициентов упругости гексагональной решетки (т. е. сапфира) имеет следующую форму:
С11 | С12 | С13 | С14 | С15 | С16 |
С21 | С22 | С23 | С24 | С25 | С26 |
С31 | С32 | С33 | С34 | С35 | С36 |
С41 | С42 | С43 | С44 | С45 | С46 |
С51 | С52 | С53 | С54 | С55 | С56 |
С61 | С62 | С63 | С64 | С65 | С66 |
Для различных напряженно-деформированных состояний коэффициенты упругости лейкосапфира имеют следующие значения:
С11 = С22 = 496; С12 = 164; С13 = С23 = 115; С3 = 498; С44 = С55 = 148.
В инженерных расчетах используют модуль нормальной упругости (модуль Юнга) Е, модуль сдвига G, модуль объемной упругости k , а также коэффициент Пуассона ν. Эти характеристики имеют простой физический смысл, легко поддаются экспериментальному определению, взаимосвязь между ними представлена в табл. 1.
Экспериментальные методы определения модулей упругости можно разделить на две группы – статические и динамические. В первом случае модуль упругости определяют путем измерения упругой деформации, возникающей в образце при приложении известного постоянного напряжения. Прикладывая растягивающую нагрузку и измеряя удлиннение, находят модуль нормальной упругости I рода или модуль Юнга. Для получения достаточно точных результатов статическими методами измерения необходимо проводить в максимально широком интервале упругих деформаций. Это повышает вероятность выхода из области упругого поведения материалов. Недостатком статических методов является то, что для проведения испытаний требуются специальные образцы, форма и размеры которых регламентируются ГОСТ 1497 – 73. Особые требования предъявляются к чистоте поверхности рабочей части образца.
Динамические методы определения упругих свойств позволяют производить измерения при малых деформациях и отличаются более высокой чувствительностью. Возможность применения динамических методов для измерения модулей упругости определяется высокой скоростью распространения упругой деформации в материалах.
Для динамического определения упругих свойств материалов разработано несколько методов. Наибольшее распространение получили:
- метод изгибных колебаний образца на резонансной и собственной частоте;
- метод крутильных колебаний;
- импульсный метод по измерению скорости распространения упругих волн.
Для определения модуля нормальной упругости Е по измерению частоты резонансных изгибных колебаний свободно подвешенного образца используются следующие формулы:
- для образца с круглым поперечным сечением
 ; (7)
; (7)
- для образца с квадратным, прямоугольным сечением
 , (8)
, (8)
где ρ = m/V – плотность материала, кг/м3;
l – длина образца, м;
d – диаметр цилиндрического образца, м;
b – размер квадратного сечения, м;
fр – резонансная частота изгибных колебаний, Гц.
Оценка достоверности результатов измерений модулей нормальной упругости материалов динамическим методом может быть выполнена по методическим указаниям МИ 668 – 84 (издательство стандартов 1985 г.).
Методика определения упругих свойств материала по измерению резонансной частоты свободно подвешенного образца позволяет одновременно определить релаксационные свойства материала, т. е. характеристики внутреннего трения.
Внутреннее трение – свойство металлов и сплавов необратимо рассеивать энергию механических колебаний. Рассеяние энергии колебаний обусловлено релаксационными процессами тепловой, атомной или магнитной перестройки в структуре материала, которые вызывают дополнительную деформацию упругого последействия. В зависимости от метода измерения внутреннее трение характеризуется различными показателями.
1) Относительное рассеяние энергии за цикл –
![]() , (9)
, (9)
где ΔW – потеря энергии за цикл;
W – упругая энергия системы.
Анализ петли гистерезиса (рис. 3 а) показывает, что энергия деформации при нагружении Wн, соответствующая площади под кривой ABCD, больше энергии деформации при разгружении Wp – площадь под кривой DEFA. Таким образом, потеря энергии за один цикл составляет:
ΔW = Wн – Wр = Пл(ABCDOA) – Пл(DEFAOD)
и равна площади петли гистерезиса.
На практике при непосредственном построении (записи) петли гистерезиса в координатах σ – ε потеря энергии ΔW рассчитывается по следующему выражению:
![]() , (10)
, (10)
где Kф – коэффициент формы петли гистерезиса, Kф = 1,33…1,57;
a, b – большая и матая полуоси петли гистерезиса.
Полная упругая энергия за один цикл равна:
![]() , (11)
, (11)
где ![]() – амплитуда напряжений,
– амплитуда напряжений,
![]() – амплитуда деформаций.
– амплитуда деформаций.
Принимая форму петли гистерезиса в виде элипса, получаем следующие выражения для полуосей (рис. 3 б):
![]() ; (12)
; (12)
 . (13)
. (13)
Учитывая синусоидальный характер изменения величины деформации Δε:
![]() (14)
(14)
после соответствующих подстановок и преобразований получаем соотношение между относительным рассеянием энергии за цикл и углом сдвига фаз:
![]() . (15)
. (15)
Вследствие малости угла φ принимаем sinφ = tgφ, тогда
![]() . (16)
. (16)
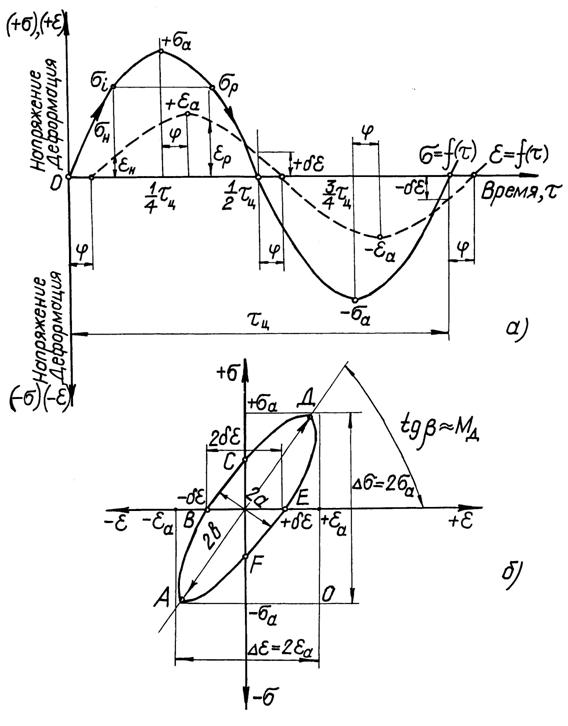
Рис. 3. Изменение напряжения и деформации
при циклическом нагружении упруго-пластичного тела:
а) диаграмма σ = f(τ); ε = f(τ);
б) гистерезисная петля σ – ε.
2) Внутреннее трение – Q-1, по физическому смыслу обратнопропорционально механической добротности колебательной системы. Внутреннее трение с относительным рассеянием энергии взаимосвязано следующим образом:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
