

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 621.865.8÷236.58
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
ПРИВОДАМИ ЗВЕНЬЕВ РОБОТА ПРИ РАЗГОНЕ
Оптимальное управление процессом разгона приводом звеньев робота является задачей вариационного исчисления, для ее решения следует определить критерий оптимальности, то есть некоторый функционал.
Следовательно, задача оптимального управления процессом разгона приводов звеньев робота является актуальной.
Для роботов критерий необходимо определить с учетом следующих исходных положений: возникающая в момент пуска звеньев робота их динамическая составляющая сопротивления перемещению, определяющаяся не только абсолютной величиной ускорения разгона звеньев, но и законом изменения его времени, является составляющей динамического момента (динамического тока) электродвигателя от разгона звеньев робота. А тепловые потери, возникающие в электродвигателе в то же время, т. е. в переходный период, пропорциональны квадрату суммарного тока якоря и могут быть представлены в виде функционала [1, 2], поэтому их следует принимать за критерий оптимальности.
Методы классического вариационного исчисления для электроприводов постоянного тока с постоянными потоками возбуждения двигателя и моментом сопротивления на валу были применены для получения оптимальных диаграмм изменения скорости (с учетом нагрева двигателя), а затем , , и (без учета нагрева двигателя). Исследования с использованием вариационного исчисления получили дальнейшее развитие в работах , который вывел формулы оптимальных процессов для электроприводов постоянного тока с переменным магнитным потоком возбуждения и для электроприводов постоянного тока с моментом сопротивления, зависящим от пути, скорости перемещения и времени [1, 2].
Задачу оптимального управления приводами пластинчатого конвейера с цепным тяговым органом и конвейеров с канатным тяговым органом рассматривали ряд исследователей в своих работах [3, 4], при этом вначале определялась оптимальная диаграмма тока, а через нее – диаграмма ускорения разгона грузонесущего органа, обеспечивающая минимум тепловых потерь в двигателе. Следует отметить, что задача оптимального управления привода конвейера в работе [3] сводилась к изотермической задаче вариационного исследования.
Решение задачи с применением уравнения Эйлера в работе [3], позволило получить сепарабольные функции, не позволяющие прямое аналитическое решение поставленной задачи, т. е. определение оптимального закона ускорения. Следовательно, решение задачи производилось косвенным методом, что является недостатком их подхода.
Для роботов задачу оптимального управления следует сформулировать следующим образом: установить закон изменения тока электродвигателя (оптимальную диаграмму тока), а через него – закон изменения ускорения разгона привода (диаграмму ускорения разгона звеньев робота), обеспечивающего минимум тепловых потерь в электродвигателях приводов робота.
Основное уравнение электропривода звеньев робота можно записать следующим образом, то есть:
 , (1)
, (1)
где Мст – статический момент, приведенный к валу электродвигателя, Н·м; ![]() – динамический момент, создаваемый вращающимися массами привода, приведенный к валу электродвигателя, Н·м;
– динамический момент, создаваемый вращающимися массами привода, приведенный к валу электродвигателя, Н·м;![]() – динамический момент на валу электродвигателя, создаваемый поступательно движущимися массами робота (в основном схвата с грузом),
– динамический момент на валу электродвигателя, создаваемый поступательно движущимися массами робота (в основном схвата с грузом), ![]() – динамический момент на валу электродвигателя, создаваемый вращающимися массами робота, Н·м.
– динамический момент на валу электродвигателя, создаваемый вращающимися массами робота, Н·м.
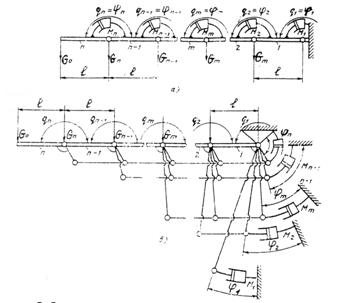
Для определения статических моментов рассмотрим упрощенную модель робота с приводами на звеньях и на основании (рисунок 1). Модель представляет собой плоскую цепочку несущих звеньев, образующих механизм руки и соединенных шарнирами, оси которых параллельны, и отражают основные особенности схем с силовыми двигателями на подвижных звеньях (рисунок 1, а) и на основании (рисунок 2, б).
Анализ проводим для самого неблагоприятного случая распределения нагрузок, т. е. когда рука находится в вытянутом положении. Считаем, что все несущие звенья имеют одинаковый вес Gзв. о и длину lзв, при этом с целью упрощения выкладок вес Gm каждого звена с установленным на нем силовым двигателем принимается сосредоточенным в левом шарнире.
При компоновке с электродвигателями на звеньях, принимается, что вес каждого электродвигателя линейно зависит от развиваемого им момента, т. е. Gдв = KMдв.
Веса звеньев руки робота определяем по следующим зависимостям:
![]() Gn = KG0l + G0; Gn-1 = K(KG0l2 + 3G0l) + G0;
Gn = KG0l + G0; Gn-1 = K(KG0l2 + 3G0l) + G0;
Gn-2 = K(K2G0l3 + 5KG0l2 + 6G0l) + G0; (2)
Gm = G0[1 + ] ,
где С – число сочетаний; m = 1, 2, …, n.
Учитывая (2) определим необходимый момент m-го электродвигателя.
Mm =  (3)
(3)
|
Сумма МΣ моментов всех n электродвигателей
MΣ = ![]() (4)
(4)
в сущности, представляет собой потребляемую механизмом энергию.
Для второй модели (рисунок 1, б) каждое несущее звено руки весом G0 соединено с электродвигателем кинематической цепью, имитируемой стержнями. Принимаем, что вес каждого звена (стержнвого элемента) линейно зависит от передаваемого им момента, т. е. Gi = Ki/Mj(j = 1, 2,…, n-1). В этом случае вес несущего звена вместе со всеми элементами на участке между m-м и (m+1)-м шарнирами составит Gm = G0 + K· и может быть определен по выражению (2).
![]() Рассматривая условия равновесия разветвленных кинематических цепей, включающих из стержневых элементов, получим:
Рассматривая условия равновесия разветвленных кинематических цепей, включающих из стержневых элементов, получим:
Mn = G0·l; Mn-1 = 2G0l + KG0l2; Mn-2=3G0l + 4KG0l2 + K2G0l3 ,
…………………., Mm = G0l (5)
Выражение для определения суммы моментов МΣ всех n электродвигателей в рассматриваемом случае имеет вид:
MΣ = ![]() (6)
(6)
Зависимость МΣ от числа n степеней подвижности руки при использовании силовых двигателей различного типа представлена на рис. 2.
|
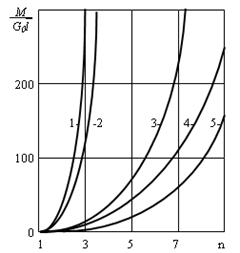
Из рис. 2 видно, что использование электрического привода возможно при n ≤ 3 (кривые 1 и 2).
Повышенное число степеней подвижности необходимо реализовать при использовании пневмо - или гидродвигателей (кривые 3 и 4). Как подтверждает практика, доля роботов с пневмо - и гидродвигателями составляет 70% общего количества моделей [5]. При уменьшении Kl до нуля, получим предельную зависимость (кривая 5) для компоновки с силовыми двигателями на звеньях.
Энергозатраты на изменение конфигурации руки в обеих схемах определяются одним и тем же выражением, то есть
AΣ = G0·lΔq· , (7)
которое для схемы с двигателями на основании определяется из выражения:
AΣ =![]() при Δqm = Δq (8)
при Δqm = Δq (8)
Следовательно, с целью минимизации энергозатрат перспективной необходимо признать компоновочную схему робота с силовыми двигателями, расположенными на основании робота (в силу малости К). Преимущества этой схемы состоят также в возможности использования электродвигателей, уменьшении размеров и массы руки, улучшении ее маневренности и динамических характеристик движения.
Вследствие постоянства величин суммарной линейной нагрузки и коэффициента основного сопротивления движению в процессе пуска звеньев робота, устанавливаем, что статический момент в первый период разгона приводов звеньев линейно зависит от времени и в дальнейшем остается величиной постоянной [4].
Динамический момент привода необходимо определять как
![]() =
= ![]() пр
пр ![]() , (9)
, (9)
где ![]() пр – момент инерции привода, для всех моделей роботов приведенный к валу двигателя; ω – угловая скорость вращения вала электродвигателя.
пр – момент инерции привода, для всех моделей роботов приведенный к валу двигателя; ω – угловая скорость вращения вала электродвигателя.
Динамический момент поступательно движущихся масс робота определяем следующим образом:
![]() =
= ![]() (10)
(10)
Динамический момент вращающихся масс робота определяем из выражения:
 , (11)
, (11)
Подставив значение  в выражение для всех типов роботов, получим следующую зависимость:
в выражение для всех типов роботов, получим следующую зависимость:
Мдв=Сф·Фэл. дв·Iэл. дв=G0·lзвi +Iпр +  , (12)
, (12)
где Сф – постоянный коэффициент, Фдв – магнитный поток электродвигателя.
Тепловые потери в якоре электродвигателя необходимо рассматривать в относительных единицах [4]
 , (13)
, (13)
а перемещение, производимое за время разгона Т [4],
 , (14)
, (14)
где i =  – ток электродвигателя в относительных единицах; ν=
– ток электродвигателя в относительных единицах; ν=![]() - скорость вращения электродвигателя в относительных единицах; r=
- скорость вращения электродвигателя в относительных единицах; r=![]() – текущее время в относительных единицах.
– текущее время в относительных единицах.
Для нахождения закона изменения тока электродвигателя в относительных единицах необходимо разделить правые и левые части выражения (12) на минимальный момент электродвигателя (номинальный статический момент сопротивления), который равен электромагнитному моменту электродвигателей всех звеньев робота.
 , (15)
, (15)
где ![]() - приведенный момент инерции привода и звеньев робота при установившемся режиме работы;
- приведенный момент инерции привода и звеньев робота при установившемся режиме работы; ![]() – электромеханическая постоянная времени. Обозначим
– электромеханическая постоянная времени. Обозначим  , получим значения тока электродвигателя в относительных единицах по фазам разгона:
, получим значения тока электродвигателя в относительных единицах по фазам разгона:
![]()
 0 ≤ t ≤ tпр
0 ≤ t ≤ tпр
 tпр ≤ t < tp (16)
tпр ≤ t < tp (16)
 tр ≤ t ≤ tр + tпp ,
tр ≤ t ≤ tр + tпp ,
где индексы 1, 2, 3 соответствуют периоду разгона.
Следовательно, необходимо установить закон изменения тока двигателя, а через него – закон изменения ускорения разгона привода, при котором тепловые потери, определяемые выражением (13) будут минимальными.
Выводы.
Для роботов сформулирована задача оптимального управления, которая формулируется следующим образом: установить закон изменения тока электродвигателя (оптимальную диаграмму тока), а через него – закон изменения ускорения разгона привода (диаграмму ускорения разгона звеньев робота), обеспечивающего минимум тепловых потерь в электродвигателях приводов робота. Приведено уравнение электропривода звена робота.
ЛИТЕРАТУРА
1. Теория оптимального управления. – М.: Физматгиз, 1970-270 с.
2. , Задачи и методы оптимального управления. – М.: Наука, 1973-446 с.
3. , , Основы проектирования и расчета карьерных пластинчатых конвейеров. – Алматы: Наука, 1984-328 с.
4. , Динамика конвейеров с канатным тяговым органом. – Алматы: Изд. КазГАСА, 2002-141 с.
5. De Grigorio G. M. Technological Forecasting on Industrial Robotcs // Proceedings of 10-th International Symposium on Industrial Robots/ 5-th Int Conference on  R Technology. Italy. Milan. 1985. P. 120-124.
R Technology. Italy. Milan. 1985. P. 120-124.
Резюме
Робот буындарының электр жетектерін ұтымды басқаруды келтірілген. Робот буындары электр жетектерінің математикалық үлгiсі жасалған. Робот буындарының ерiксiз келтiрулерінің динамикалық моменттiн анықтау үшiн аналитикалық тәуелдiлiктер алынған.
Summary
The problem of optimum control is formulated by electric drives of links of the robot. The mathematical model of the electric drive of links of the robot is developed. The analytical are received
КазНТУ им. К.И. Сатпаева Поступила 7.04.11
