


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 629.113.001 (075.8)
Уральский государственный лесотехнический университет,
г. Екатеринбург
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ДВИЖЕНИЯ
СОЧЛЕНЕННЫХ ТРАНСПОРТНЫХ СИСТЕМ
Статья посвящена математическому описанию процесса движения сочленённой транспортной системы, обладающей бесконечному числу степеней свободы. Движение рассматривается как обособленное перемещение отдельно каждой секции системы, связанных силовым взаимодействием в сцепном устройстве.
Ключевые слова: сочленённая транспортная система; теория движения колёсных машин; углы Крылова-Эйлера; математическая модель
Bazhenov, E. E.
Ural state forest engineering University
Ekaterinburg
MATHEMATICAL MODELING OF MOVEMENT
AN ARTICULATED VEHICLE SYSTEMS
The article is devoted to the mathematical description of the process of movement co-cleenol transport system with infinite number of degree-penalties freedom. The movement is considered as a separate move separately of each section of the system of power interactions in the coupling device.
Key words: articulated vehicle system; theory of motion of wheeled vehicles; Krylov's –Euler’s; mathematical model
Сочлененная транспортная система имеет бесконечное число степеней свободы. Для математического описания процесса движения такой системы необходимо рассматривать обособленное движение первой и второй секций, заменив узел сочленения (УС) между ними силой взаимодействия. При этом проекции реакций связи одного и того же УС для разных секций будут равны по модулю и противоположны по направлению. В общем случае взаимодействие между секциями заменяется равнодействующей силой и равнодействующим моментом, спроектированными на соответствующие оси координат. Составим модель криволинейного движения сочлененного транспортного средства, представленного на рис. 1. Усилие на цапфах орудия учитывать не будем, поэтому силу Pц принимаем равной нулю.
Рассмотрим движение каждой секции как свободное движение твердого тела (рис.1). Перемещение рассматривается относительно неподвижной системы координат (НСК) О1X1Y1Z1, связанной с землей. В ней моделируются внешние условия движения СТС, а точка О1 является точкой начала отсчета траектории движения. В качестве полюса выберем точку О, которая является центром масс (ЦМ) тела и проведем через нее оси двух прямоугольных систем координат – OX¢Y¢Z¢ и OXYZ. Подвижная система координат (ПСК) OXYZ жестко связана с твердым телом. Оси X, Y, Z проходят через ЦМ, совпадают с осями симметрии и являются главными осями.
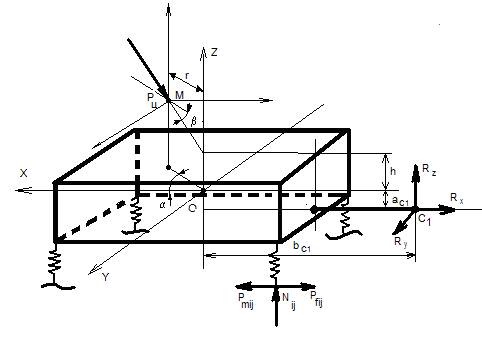

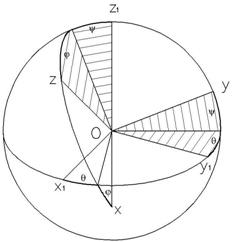
Оси OX¢Y¢Z¢ при движении тела будут перемещаться вместе с полюсом поступательно. Тогда положение тела в системе отсчета О1X1Y1Z1 будет известно, если будут известны координаты полюса, т. е. ЦМ и положение тела по отношению к осям OX¢Y¢Z¢, определяемое углами Крылова q, y, j (рис. 2).
![]()
Следовательно, уравнения движения свободного твердого тела, позволяющие найти его положение по отношению к системе отсчета О1X1Y1Z1 в любой момент времени, имеют вид:
 (1)
(1)
Для описания движения полюса воспользуемся теоремой об изменении количества движения системы.
 (2)
(2)
Запишем теорему в проекциях на ПСК.
![]() , (3)
, (3)
где `i, `j, `k – единичные орт – векторы ПСК;
`vO – скорость полюса O (ЦМ).
Продифференцируем уравнение (3).
 , (4)
, (4)
где
 , (5)
, (5)
Тогда уравнение (4) примет вид
 . (6)
. (6)
Поскольку  , то движение полюса, в качестве которого взят ЦМ будет описываться следующими уравнениями:
, то движение полюса, в качестве которого взят ЦМ будет описываться следующими уравнениями:
 (7)
(7)
Составим дифференциальные уравнения движения тела во вращательном движении вокруг центра масс, используя теорему об изменении кинетического момента системы. Поскольку оси ПСК являются главными, то уравнения принимают вид динамических уравнений Эйлера.
 (8)
(8)
Для нахождения закона вращательного движения тела, т. е. для нахождения углов Крылова q, y, j как функций времени необходимо присоединить к системе кинематические уравнения Эйлера (9).
 (9)
(9)
Тогда система дифференциальных уравнений в проекции на ПСК, описывающая движение секции будет иметь вид:
 (10)
(10)
где:
- Pfij – сила сопротивления движению i-го колеса j-й секции;
- Pmij – сила взаимодействия между опорной поверхностью и i-м колесом j-й секции;
- Nij – нормальная реакция опорной поверхности под i-м колесом j-й секции;
- R – равнодействующая сил в узле сочленения;
Для того чтобы найти уравнения движения свободного твердого тела, позволяющие найти его положение по отношению к неподвижной системе координат О1X1Y1Z1 в любой момент времени, необходимо ввести уравнения перехода из ПСК (ОXYZ) в НСК (О1X1Y1Z1). Этими уравнениями являются элементы матрицы направляющих косинусов, которая получена путем последовательного поворота ПСК относительно НСК на углы q, y, j соответственно.
 (11)
(11)
где:
-  - координаты вектора в НСК;
- координаты вектора в НСК;
-  - координаты вектора в ПСК;
- координаты вектора в ПСК;
-  - матрица направляющих косинусов.
- матрица направляющих косинусов.
Уравнения направляющих косинусов имеют вид
 (12)
(12)
Переход из НСК в ПСК осуществляется следующим образом:
 (13)
(13)
Аналогично составляется система уравнений для второй и последующих секций сочлененной транспортной системы. Полученная система уравнений является неопределенной. Для раскрытия неопределенности в систему необходимо ввести уравнения состояния, в качестве которых могут выступать уравнения, описывающие буксование колес относительно опорной поверхности и уравнения увода колес.
Список литературы
1. Баженов транспортные и технологические системы/. - Екатеринбург: УГТУ – УПИ, 2009. – 174 с.
2. Баженов теории сочленённых транспортных систем/, , – Екатеринбург. УрФУ, 2010. – 257 с.
