

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
2.2. Неалгоритмические методы
цифрового моделирования.
Скорость решения ряда сложных задач программно-алгоритмическим методом на ЦВМ общего назначения недостаточна и не удовлетворяет потребностям инжененрных систем автоматизированного проектирования (САПР). Одним из таких классов задач, широко применяемых в инженерной практике при исследовании динамики (переходных процессов) сложных систем автоматизации, являются системы нелинейных дифференциальных уравнений высоких порядков в обыкновенных производных. Для ускорения решения названных задач в состав программно-технических комплексов САПР могут включаться в дополнение к главной (ведущей) ЦВМ общего назначения ГВМ, проблемно-ориентированные на решение нелинейных дифференциальных уравнений. Они организуются на основе цифрового математического моделирования неалгоритмическим методом. Последний позволяет повысить производительность САПР за счет присущего ему параллелизма вычислительного процесса, а дискретный (цифровой) способ представления математических величин – достичь точности обработки не хуже, чем в ЦВМ. В этих ГВМ применяются два метода цифрового моделирования:
1. Конечно-разностное моделирование;
2. Разрядное моделирование.
Первый метод, используемый в ГВМ типа цифровых дифференциальных анализаторов (ЦДА) и цифровых интегрирующих машин (ЦИМ), – это известный метод приближенных (пошаговых) вычислений в конечных разностях. Цифровые операционные блоки ГВМ, построенные на цифровой схемотехнике, обрабатывают достаточно малые дискретные приращения математических величин, передаваемые по линиям связи между операционными блоками. Вводимые и выводимые математические величины представляются, хранятся и накапливаются из приращений в цифровых n-разрядных кодах в риверсивных счетчиках или регистрах накапливающих сумматоров.
Приращения всех величин обычно кодируются одной единицей младшего разряда: D:=1мл. р. Это соответствует квантованию по уровню всех обрабатываемых величин с постоянным шагом квантования D=1. Следовательно, ограничивается скорость нарастания всех машинных величин: |dS/dx|£1.
Знаки одноразрядных приращений кодируются методом знакового кодирования на двухпроводных линиях связи между операционными блоками:
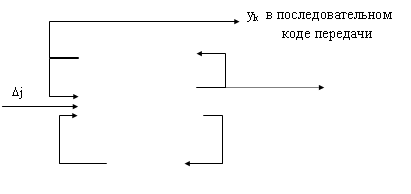
Операционные блоки строятся в основном на одноразрядных цифровых функциональных узлах последовательного действия. n-разрядные величины передаются между функциональными узлами в последовательном коде передачи младшими разрядами вперед.
Основной операционный блок – цифровой интегратор, основан на приближенном вычислении интеграла по методу прямоугольников:
 ,
,
где DSi=yiDx – приращение интеграла в i-м шаге интегрирования, а i-я ордината подинтегральной функции y(x) – yi вычисляется путем накопления её приращений:
Приращение интеграла DSi в i-м шаге интегрирования образуется как единица переполнения накопленной интегральной суммы :
с введением постоянного нормирующего коэффициента кн = 2-n приращения на выходах интеграторов образуются последовательно и обрабатываются в следующих интеграторах также последовательно. Исключением является интегрирование суммы нескольких подинтегральных функций
или в приращениях:
Тогда по нескольким m входным линиям l-е приращения могут поступать синхронно в каком-то j-м шаге. Для последовательного сложения их разносят в пределах шага с помощью линий задержек, увеличивая в m раз тактовую частоту работы входного накапливающего сумматора. Поэтому число суммируемых подинтегральных функций обычно ограничивают до двух.: m=2.
Структурная организация цифрового интегратора-сумматора весьма проста. Он строится в виде последовательного соединения следующих функциональных узлов :
· схема 2ИЛИ с линией задержки tз=0,5t на одном из входов
· входной накапливающий сумматор приращений подинтегральных функций, выполняющий накопление n-разрядных их ординат по входным приращениям :
и хранящий накопленные числа yк в регистре сдвига (туда же загружаются начальные значения ординат : y20 + y20), и построенный, например, по схеме одноразрядного накапливающего сумматора :
0...n-1 РС |
ОСМ |
T |
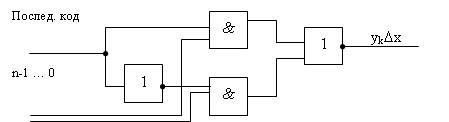
· блок умножения на одноразрядное приращение yk*Dx, который с учетом знака Dх выполняет прямое или обратное преобразование кодов отрицательных чисел yk, например из прямого в обратный, или наоборот :
yк
|
При Dх:=(10) код yk передается без изменений, а при Dх:=(01) на выходе образует код, обратный входному коду yk.
·
Выходной накапливающий сумматор, который в каждом к-ом шаге интенрирования прибавляет к своему старому содержимому содержание регистра сдвига РС входного НСМ (в последовательном коде передачи этот шаг выполняется за n тактов):
· формирователь выходного приращения интеграла : DSi := единица переполнения Si, преобразующий признак переполнения в биполярный код приращения (наиболее просто он реализуется, если отрицательные накопленные числа Si представить в модифицированном коде: прямом, обратном или дополнительном). Соответствующая структурная схема цифрового интегратора приведена на рис. 9.14 (с.260) учебника [4]. В схемах цифровых моделей применяется следующее условное обозначение цифрового сумматора-интегратора :
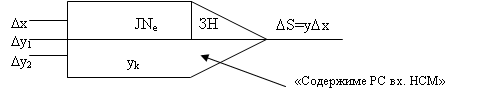
«Зн.» указывает признак инверсии (-), если она требуется. Важным преимуществом данного метода конечно-разностного цифрового моделирования является то, что один и тот же цифровой интегратор без изменения его схем используется для выполнения линейных и нелинейных операций, необходимых для решения обыкновенных дифференциальных уравнений. Это объясняется тем, что при программировании ЦДА и ЦИМ исходные уравнения в производных преобразуются к уравнениям в дифференциалах. Рассмотрим простейшие программы цифровых моделей :
1. умножение переменной х на константу к:
S = кх
Перейдя к дифференциалам dS=кdx, убедимся в том, что эта операция выполняется одним интегратором при соответствующей его начальной установке :
 |
Значения коэффициента к загружается в качестве начального значения y0 в регистр РС входного НСМ цифрового интегратора;
2. возведение в квадрат S=x2, или в дифференциалах dS=2xdx
 |
3. Умножение S=xy, или в дифференциалах dS=xdy+ydx.
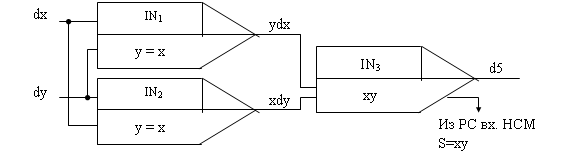 |
4. Генерация аналитических функций как решений, соответствующих им дифференциальных уравнений;
4.1. экспоненциальная функция S=e-х, которая является решением простейшего дифференциального уравнения 1-го порядка. dS/dx = - S при начальных условиях : S(0)=1, или в дифференциалах dS = - Sdx
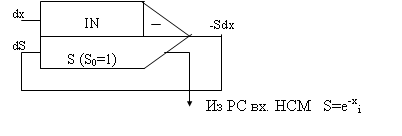 |
4.2. тригонометрические функции, например y=sinx, которая является решением дифференциального уравнения второго порядка ![]() (так как
(так как  ), или в дифференциалах
), или в дифференциалах
 |

Интересно, что могут быть генерированы функции как от любой входной зависимой переменной х(t), где хi(ti) – её дискретные ординаты, так и от независимой, например по времени : Si = e-ti, yi = sinti. В последнем случае достаточно в качестве приращений Dx » Dt:=1,1,1,…,1,1, т. е. последовательность тактовых синхроимпульсов.
Таким образом, принцип составления и функционирования неалгоритмических цифровых моделей совпадает с принципами аналогового моделирования с тем лишь отличием, что за счет цифровой реализации операционных блоков достигается более высокая точность, но при этом примерно в n раз при n-разрядной сетке снижается скорость решения задач. Правда, это снижение скорости частично компенсируется за счет параллелизма. НПВ. в итоге скорость получения результатов решения дифференциальных уравнений у ЦДА в 10 раз выше, чем у ЦВМ общего назначения.
Дальнейшее повышение производительности ГВМ связано с существенным увеличением аппаратной сложности. Например, разрядное моделирование путем установления поразрядного соответствия между математическими описаниями сложной многослойной структурной схемы модели. Число слов равно разрядности n цифрового представления обрабатываемых математических величин. Каждый слой – это неалгоритмическая аналоговая или цифровая модели уравнений одного разряда решаемой задачи. Слои объединяются между собой цепями межразрядных переносов. В каждом разряде выполняются вычисления по рассмотренным выше неалгоритмическим принципам, а точность решения задач повышается благодаря многоразрядному принципу построения схемы модели. Скорость решения задач – максимально возможная из-за высокой степени распараллеливания вычислительного процесса : в каждом разряде параллельные неалгоритмические вычисления и в n разрядных слоях вычисления выполняются также параллельно. Однако аппаратная сложность таких ГВМ очень велика. Поэтому они не применяются в составе технических средств САПР, а используются в некоторых системах автоматизации, когда предъявляются очень высокие требования к производительности в реальном масштабе времени, например, в авиационных тренажерах и в системах обработки выходных данных аэродинамической трубы. В учебнике [4] с.253-258 рассмотрен один из видов таких ГВМ, так называемых разрядно-аналоговых вычислительных устройств, в разрядных слоях которых применяется аналоговое моделирование (выдвигается на самостоятельную проработку).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
