

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Лабораторная работа № 4
Изучение движения математического маятника
Цель: изучение законов колебательного движения; компьютерное моделирование колебаний математического маятника; освоение основных приемов работы с ранжированными переменными и массивами в MathCAD; получение анимированных графиков.
Краткие сведения, необходимые для выполнения работы
Математическим маятником называется идеальная система, состоящая из нерастяжимой и невесомой нити и тела, рассматриваемого как материальная точка. Отклонение маятника от положения равновесия характеризуется углом б. При отклонении маятника от положения равновесия возникает вращательный момент, стремящийся вернуть его в положение равновесия (рис. 4.1). Прежде чем описывать движение маятника, напомним некоторые определения и законы.

Рис. 4.1
Моментом силы ![]() относительно точки называют псевдовектор
относительно точки называют псевдовектор ![]() , равный векторному произведению
, равный векторному произведению
![]() , (4.1)
, (4.1)
где ![]() – радиус-вектор, проведенный из точки, относительно которой находится момент, в точку приложения силы (рис. 4.2 а). Направление псевдовектора совпадает с направлением поступательного движения правого винта при его вращении от
– радиус-вектор, проведенный из точки, относительно которой находится момент, в точку приложения силы (рис. 4.2 а). Направление псевдовектора совпадает с направлением поступательного движения правого винта при его вращении от ![]() к
к ![]() . Модуль момента силы определится следующим образом:
. Модуль момента силы определится следующим образом:
![]() , (4.2)
, (4.2)
где величину ![]() называют плечом силы,
называют плечом силы, ![]() – угол между векторами
– угол между векторами ![]() и
и ![]() .
.
Моментом импульса ![]() частицы относительно точки О называется псевдовектор
частицы относительно точки О называется псевдовектор ![]() , равный векторному произведению:
, равный векторному произведению:
![]() , (4.3)
, (4.3)
где ![]() – радиус-вектор тела, проведенный из точки О,
– радиус-вектор тела, проведенный из точки О, ![]() – импульс частицы,
– импульс частицы, ![]() – скорость (рис 4.2 б).
– скорость (рис 4.2 б).
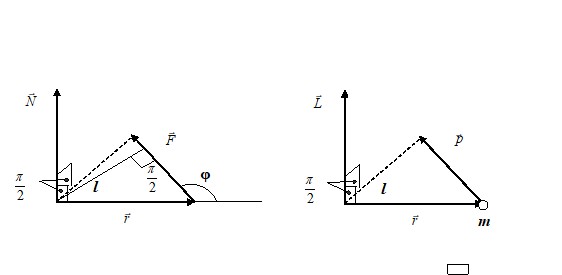
а) б)
Рис. 4.2
Величины ![]() и
и ![]() связаны между собой уравнением движения:
связаны между собой уравнением движения:
![]() . (4.4)
. (4.4)
Моментом инерции материальной точки называется физическая величина J, равная произведению массы материальной точки на квадрат ее расстояния до оси вращения:
J=mr2. (4.5)
Момент инерции является величиной аддитивной, поэтому момент инерции системы материальных точек можно представить следующим образом:
![]() . (4.6)
. (4.6)
В (4.6) суммирование соответствует дискретным системам, а интегрирование – непрерывным. При этом интегрирование выполняется по всем точкам системы.
Момент импульса однородного твердого тела, вращающегося с угловой скоростью ![]() вокруг своей оси симметрии, связан с моментом его инерции относительно той же оси соотношением:
вокруг своей оси симметрии, связан с моментом его инерции относительно той же оси соотношением:
![]() . (4.7)
. (4.7)
Уравнение (4.4) выражает основное уравнение динамики вращательного движения твердого тела вокруг неподвижной оси. Применим его к математическому маятнику:
![]() , (4.8)
, (4.8)
где ![]() , момент инерции маятника длиной l и массой m, g – ускорение свободного падения,
, момент инерции маятника длиной l и массой m, g – ускорение свободного падения, ![]() – угловое ускорение. В случае малых колебаний
– угловое ускорение. В случае малых колебаний ![]() , тогда уравнение движения можно записать в виде:
, тогда уравнение движения можно записать в виде:
![]() , (4.9)
, (4.9)
где проведены следующие замены:  и
и ![]() . Уравнение (4.9) является дифференциальным уравнением гармонических колебаний (см. формулу 3.9). Его решение имеет вид:
. Уравнение (4.9) является дифференциальным уравнением гармонических колебаний (см. формулу 3.9). Его решение имеет вид:
![]() . (4.10)
. (4.10)
В уравнении (4.10) величина А имеет смысл максимального угла отклонения, так как максимальное значение, которое может принимать ![]() равно единице.
равно единице.
При малых отклонениях период колебаний зависит от длины маятника и может быть вычислен по формуле:
 . (4.11)
. (4.11)
Применение ранжированных переменных
До сих пор мы рассматривали переменные, которые имеют единственное значение. Однако в математике и физике часто возникает необходимость в задании некоторого ряда значений переменной, чаще всего упорядоченного. Например, для вычисления факториала N!=1·2·3... ·(N–1)·N нужно сформировать ряд целых чисел от единицы до N с шагом 1. Часто ряд значений какой-либо переменной, например абсциссы х, нужен для построения графика функций. MathCAD строит графики функций по точкам, обычно соединяя их отрезками прямых.
Для создания таких рядов в MathCAD используются так называемые ранжированные переменные. Иногда они заменяют управляющие структуры – циклы, но полноценной такая замена не является. Это обусловлено, в частности, тем что для ранжированных переменных не предусмотрена возможность выбора произвольных значений (это возможно у векторов).
В самом простом случае для создания ранжированной переменной используется выражение:
Name:= Nbegin. . Nend,
где Name – имя переменной, Nbegin – ее начальное значение, Nend – конечное значение, .. – символ, указывающий на изменение переменной в заданных пределах (он вводится знаком точки с запятой “;”). Если Nbegin < Nend, то шаг изменения переменной будет равен +1, в противном случае – -1.
Для создания ранжированной переменной общего вида используется выражение:
Name:= Nbegin, (Nbegin + Step)..Nend.
Здесь Step – заданный шаг изменения переменной (он может быть положительным, если Nbegin < Nend, или отрицательным в противном случае).
Ранжированные переменные широко применяются для представления численных значений функций в виде таблиц, а также для построения их графиков. Знак равенства после любого выражения с ранжированными переменными инициирует таблицу вывода.
Создание динамических графиков
Создание динамических графиков рассмотрим на примере построения окружности в полярной системе координат. Уравнение окружности радиусом 2 имеет вид ![]() . Под переменной х понимается угол. Этот угол будет изменяться со временем, поэтому его лучше задать в виде ранжированной переменной:
. Под переменной х понимается угол. Этот угол будет изменяться со временем, поэтому его лучше задать в виде ранжированной переменной:
![]()
Величина FRAME определяет время анимации. Сначала необходимо вставить в документ шаблон построения графика в полярной системе координат, ввести имена аргумента x и функции r(x), а также границы изменения значений функции. В рассматриваемом примере в качестве границ целесообразно выбрать 0 и 3. Затем вызвать окно диалога анимации (пункт View в строке меню), выбрать подпункт Animate и определить величину изменения параметра FRAME (в данном примере от 0 до 8). Прежде чем изображение станет динамическим, следует выделить область графика и затем нажать кнопку Animate. В этом же окне диалога можно выполнить сохранение полученного клипа в виде отдельного файла.
Порядок выполнения работы
В документ MathCAD введите исходные данные в соответствии с номером варианта. Введите максимальный угол отклонения, указав размерность (градусы). Введите формулу, определяющую зависимость угла отклонения от времени. Обратите внимание, что в полярной системе координат угол отсчитывается против часовой стрелки. Представьте, что точка закрепления нити подвеса математического маятника находится в начале координат. Тогда в состоянии покоя тело находится на расстоянии l от начала координат, а значение угла следует выбрать таким, чтобы маятник отклонялся от вертикального положения. Кроме (или вместо) угла можно задать угловую скорость для начального момента времени. В физике эта процедура называется заданием начальных условий. Для построения графика следует задать максимальное время, в течение которого будут происходить колебания. В данном случае его можно выбрать равным двум периодам. Эта же величина будет являться временем анимации. Способ его задания аналогичен тому, как это описано в примере. В данном случае для этого рекомендуется использовать выражениеТаблица вариантов
Вариант | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
Угол максимального отклонения, о | 60 | 45 | 50 | 40 | 65 | 30 | 35 | 60 | 70 | 75 |
Длина нити, м | 1,2 | 1,3 | 1,5 | 1,0 | 1,6 | 1,1 | 1,7 | 1,5 | 2,0 | 1,9 |
Контрольные вопросы
Дайте определения момента силы и момента импульса (относительно точки и относительно оси). Объясните на примерах и рисунках, как определить направления перечисленных в предыдущем пункте векторных величин. Какую величину называют плечом силы? Изобразите ее графически. Дайте определение момента инерции материальной точки. Запишите выражения для определения моментов инерции диска, полого и сплошного цилиндра, шара и стержня относительно осей их симметрии. Сформулируйте теорему Штейнера и приведите примеры ее использования. Дайте определение математического маятника. Как вычислить период колебаний математического маятника? Одинаковыми ли будут основные характеристики колебаний одного и того же маятника на Земле и Луне?