
тело 2:
![]() , (3.6)
, (3.6)
![]() , (3.7)
, (3.7)
![]() ; (3.8)
; (3.8)
тело 3:
![]() . (3.9)
. (3.9)
С учетом кинема тиче ских соотно шений (1.7) систему уравн ений (3.3) - (3.9) преобразуем к виду:
![]() ,
,
![]() ,
,
![]() , (3.10)
, (3.10)
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Уравнения (3.10) составляют систему алгебраических уравнений относительно функц ий
![]() , N1, Fсц, T12, T23, X2, Y2.
, N1, Fсц, T12, T23, X2, Y2.
Решая эту систему, получаем и дифференциальное уравнение движения системы, и выражения для определения реак ций.
2. Применение принципа Даламбера-Лагранжа и уравнений Лагранж а второго рода.
2.1. Составление дифференциального уравнения движения механизма с помощью принципа Даламбера-Лагранжа.
Общ ее урав не ние динамики системы е сть математическое выражение пр инципа Даламбера-Лагранжа
![]() . (4.1)
. (4.1)
Здесь ![]() - сумма элементарных работ всех акти вны х сил на возможном перемещении системы;
- сумма элементарных работ всех акти вны х сил на возможном перемещении системы;
![]() - сумма элементарных работ всех сил и нерции на возможном перемещении системы.
- сумма элементарных работ всех сил и нерции на возможном перемещении системы.
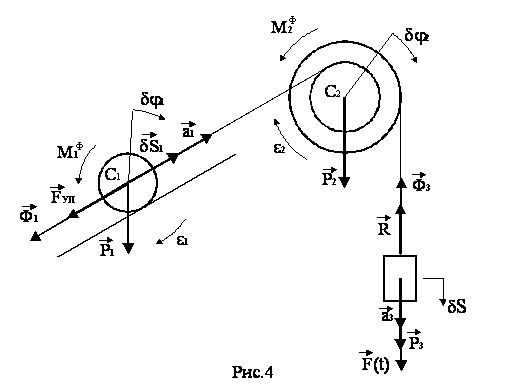
Изобразим на рисунке акти вные силы и силы инерции (рис.4). Реакции идеальных связей ![]() не учитывают и не отображают на расчетной схеме, поскольку по определению работа их реакций на любом возможном перемещении системы равна нулю. Пружина является неидеальной связью. Введем реакцию этой связи в число активных сил.
не учитывают и не отображают на расчетной схеме, поскольку по определению работа их реакций на любом возможном перемещении системы равна нулю. Пружина является неидеальной связью. Введем реакцию этой связи в число активных сил.
Соо бщим системе возможное перемещение . Возможная работа активных сил определяется ка к сумма следующих элементарных работ:
![]() . (4.2)
. (4.2)
Вычисляя последовательно элементарные работы активных сил и суммируя их, получаем после несложных преобразований
 . (4.3)
. (4.3)
Аналогичное выражение для приведенной силы Fпр получено ранее [см. (1.23)].
Найдем возможную работу сил инерции:
![]() . (4.4)
. (4.4)
Для величин главных векторов и главных моментов сил инерции имеем следующие выражения :
![]() ;
; ![]() ;
;
![]() ;
; ![]() . (4.5)
. (4.5)
Используя кинемати ческие соотношения (1.7), можно записать
![]() ;
; ![]() ;
;
![]() ;
; ![]() ; (4.6)
; (4.6)
![]() ;
; ![]() .
.
Тогда возможную работу сил инерции можно преобразовать к виду
 (4.7)
(4.7)
или
![]() , (4.8)
, (4.8)
где
 . (4.9)
. (4.9)
Аналогичное выраже ние для приведенной массы системы был о получено ран ее [см.(1.10)]. Под ставляя выра жения (4.3) и (4.8) в об щее уравн ение д инамики (4.1), получаем
 . (4.10)
. (4.10)
Поделив (4.10) на ![]() , получим диффере нц иальное уравне ние вынужденных колебаний системы:
, получим диффере нц иальное уравне ние вынужденных колебаний системы:
![]() , (4.11)
, (4.11)
где
 ;
;
![]() . (4.12)
. (4.12)
Д ифференциальное уравнение (4.11) полностью совпадае т с полученны м ране е уравнением (1 .25).
2.2. Составление дифференциального уравнения движения механизма с помощью уравнений Лагранжа 2-го рода.
Составим теперь уравне ния Лагранжа 2-го рода. Для механической систе мы с одной степенью св ободы диффе ренц иальное ура внение дви же ния в обобщенных координатах имеет вид:
![]() , (4.13)
, (4.13)
где Т - кин етич еская энерги я системы;
Q - обобщенная сила;
S - обобщенная координата;
![]() - обобщенная скорость.
- обобщенная скорость.
Выражение для кинетической энергии системы было найдено ран ее (1. 8):
![]() ,
,
где
 .
.
Учи тывая, ч то ![]() , пол учаем
, пол учаем
![]() . (4.14)
. (4.14)
Производные от кинетической энергии
![]() ;
; ![]() ;
; ![]() . (4.15)
. (4.15)
Для определения обобщенной силы Q сообщим системе возможное перемещение ![]() (рис. 4) и вычислим сумму элементарных рабо т всех активных сил на возможных перемещениях точек их приложения [см. (4.3)]:
(рис. 4) и вычислим сумму элементарных рабо т всех активных сил на возможных перемещениях точек их приложения [см. (4.3)]:
 .
.
С другой стороны для системы с одной степенью свободы
![]() . (4.16)
. (4.16)
Сравнивая два последних соотношения, получаем
 . (4.17)
. (4.17)
Подставляя производные от кинетической энергии (4.1 5) и обобщенную силу (4.16) в уравнение Лагранжа, пол учаем
или
![]() . (4.18)
. (4.18)
Полученное уравнение (4.18) совпадает с уравнениями (1.25) и (4.11).
3. Анализ колебаний механической системы с одной степенью свободы
3.1. Колебания механической системы при отсутствии сил сопротивления среды
В дифференциальном уравнении движения системы, полученном ранее (1.25), полагаем ![]() , тогда уравнение движения примет вид:
, тогда уравнение движения примет вид:
![]() (5.1)
(5.1)
Начальные условия: при ![]() заданы
заданы ![]() и
и ![]() .
.
3.1.1. Свободные колебания
Если внешнее возмущение отсутствует (т. е. ![]() ), то дифференциальное уравнение движения становится однородным:
), то дифференциальное уравнение движения становится однородным:
![]() (5.2)
(5.2)
и называется дифференциальным уравнением свободных колебаний, т. е. таких движений системы, которые происходят под действием так называемых восстанавливающих сил. Восстанавливающие силы – это такие силы, каждая из которых стремится вернуть систему в состояние статического равновесия (силы тяжести, упругие силы).
Решение уравнения (5.2) с учетом начальных условий имеет вид:
![]() (5.3)
(5.3)
где  ;
; ![]() ;
;  . (5.4)
. (5.4)

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
