
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Исследование колебаний механической системы с одной степенью свободы
Под динамическим поведением конструкции следует понимать реакцию (отклик) ее на внешние кинематические или динамиче ские возмущения, обусловленные условиями эксплуатации. Прогнозировать динамическое поведение - это значит предвидеть последствия эксплуатацион ных возмущений, проанализировать поведение задуманной машины на основе математических моде лей, устранить заблаговременно нежелательные эффекты, добиваясь оптимальных свойств б удущей машины. Важнейшим этапом исследования динамического поведен ия конструкций яв ляется решение двух основных задач динамики м атериальных объектов : материальной точки и м атериальной си стемы.
Эти задачи следующие:
1. По заданному закону движения объекта и распределению масс его элемент ов определить харак теристики сило вых полей, в которых функционирует объект.
2. При задан ных характеристиках силовых полей и распределе нию масс элементов объекта определить закон его движения.
Решение названных двух задач требуе т уме ния производить их постановку. Процедура постанов ки задач динамики включает в себя три эт апа:
1. Формулиров ку задачи.
2. Построение расчетной схемы.
3. Постро ение математической мо дели .
Формулировка задачи - это условие ( текст) задачи. Она осу ществляется руководите лем работ сов местно с испо лнител ем.
Ра счетная схема - это рисунок, на к ото ром изображены:
а) р ационал ьно выбранная система координат ;
б) упрощенная с хема механической системы в произвольном положении;
в) действующие силы, кинематические характеристики и т. п. (в зависимости от применяемого метода) .
Математическая мод ел ь - это система ди ффер енциальных ура внений, алгебраических уравнений и на чальных условий, описывающих динамическое поведение механической системы.
Дано: m1, m2, m3 - массы тел механической системы, с - жесткость упр угого элемента, r1 - радиу с од нород ного катка 1, r2, R2 - радиусы с тупеней блока 2, i2 - радиус инерции блока 2, ![]() - коэффициент сопрот ивления среды,
- коэффициент сопрот ивления среды, ![]() - угол наклона пло скости, по которой катится каток 1.
- угол наклона пло скости, по которой катится каток 1.
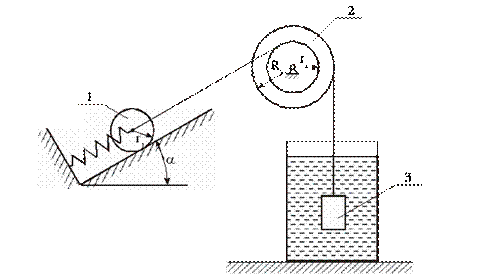
Рис.1
Определить: применяя основные теоремы динамики системы и аналитические методы теоретической механики, определить закон движения первого тела и реакции внешних и внутренних связей.
Порядок выполнения работы :
1) Построить ра счетну ю схему.
2) Используя теорему об изменении кинетической энергии механической системы, составить ди фференциальное уравне ние движения механизма.
3) Сформулировать начальны е условия движения.
4) Найти решение дифференциального уравнения движения.
5) Используя нач альны е ус лов ия, опред елить произвольные пос тоянные , которые возникают в процессе интегрирования дифференциаль ного уравнения дв ижения .
6) П одставив н айденные постоянн ые интегрировани я в решение дифференциального уравнения, записать закон дви же ния объе кт а.
7) Составить систему уравнений для определения реакций связей с помощью т еоремы об изменении количества движения механической си стемы и теоремы об изменении кинетического момента механиче ско й системы.
8) Построить алгоритм вычи слен ий для реализации на ЭВМ.
9) Прои зве сти вычисления в дисплейном классе.
10) Прои зве сти графическую обработ ку результатов вычи слений.
Решение.
1. Применение основных теорем динамики механической системы
1.1. Постановка второй основной задачи динамики механической системы
Расчетная схема представлена на рис.2
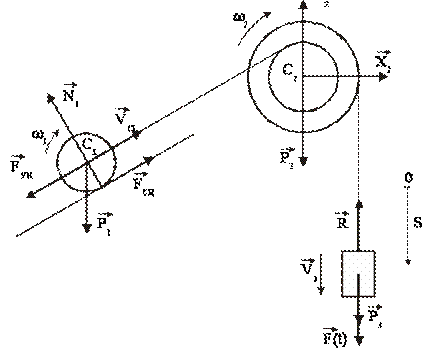
Рис.2
На ри с. 2 обо значено:
![]() - силы тяжести,
- силы тяжести,
![]() - нормальная реакция опорной плос кости ,
- нормальная реакция опорной плос кости ,
![]() - с ила сцепления,
- с ила сцепления,
![]() - упругая реакция пружины,
- упругая реакция пружины,
![]() - реакции подшипника блока 2,
- реакции подшипника блока 2,
![]() - сила вязкого сопротивления,
- сила вязкого сопротивления,
![]() - возмущающая с ила.
- возмущающая с ила.
Рассматриваемая механическая система имеет одну степень свободы (нити нерастяжимые, качение катка 1 происходит без скольжения). Будем определять ее положение с помощью координаты S. Начало отсчета координаты совместим с положением статического равновесия центра масс груза 3.
Для пос троения диффере нциального уравнения движ ения системы используем теорему об изменении кинетической энергии механической системы в форме:
![]() , (1.1)
, (1.1)
где Т - кинетическая энергия системы,
![]() - сумма мощностей вне шн их сил,
- сумма мощностей вне шн их сил,
![]() - сумма мощно стей внутренних сил.
- сумма мощно стей внутренних сил.
Теорема (1.1) формулируется так : "Производная по времени от кинетической энергии механической системы равна алгебраической сумме мощностей вне шних и внутренни х сил, дей ствующих на точки механической системы".
Вычислим к инетическую энергию системы как сумму кинетических энергий :
![]() . (1.2)
. (1.2)
Каток 1 совершает плоскопараллельное движение, поэт ому его кинетическая энергия опр еделяется по теореме Кенига:
![]() , (1.3)
, (1.3)
где VC1 – скорость центра масс катка;
JC1 – момент инерции относительно центральной оси катка;
![]() – угловая скорость катка.
– угловая скорость катка.
Блок 2 совершает вра щательное движение около неподвижной оси. Его кинетическая энергия
![]() , (1.4)
, (1.4)
где JC2 – момент инерции относительно центральной оси блока;
![]() – угловая скорость блока.
– угловая скорость блока.
Гру з 3 совершает поступательное движение. Его кинетическая энергия равна:
![]() . (1.5)
. (1.5)
Кинетическая энергия всего механи зма будет равна:
![]() . (1.6)
. (1.6)
Выразим VC1, ![]() и
и ![]() через скорость груза 3. Положив V3 = V, получим
через скорость груза 3. Положив V3 = V, получим
![]() (1.7)
(1.7)
Подставляя (1.3), (1.4), (1.5) в (1. 6) с учето м (1.7), по луча ем:
 (1.8)
(1.8)
и ли
![]() , (1.9)
, (1.9)
гд е
 . (1.10)
. (1.10)
Величину ![]() будем называть приведенной массой.
будем называть приведенной массой.
Найдем производную от кинетической энергии по времени
![]() . (1.11)
. (1.11)
Теперь вычи слим правую часть ура внения (1 .1 ) - сумму мощ ностей вне шни х и внутренни х сил .
Мощность с илы равна скалярному произведению вектора силы на скорость точки ее приложения
![]() . (1.12)
. (1.12)
Рассматриваемая нами механическая система является неизменяемой, т. е. тел а, входящие в систему, недеформируемы и скоро сти их точ ек относительно друг друга равны нулю. Поэтому сумма мощностей всех внутренних сил будет равняться нулю:
![]() . (1.13)
. (1.13)
Будут равняться нулю и мощности некотор ых внешних сил, прило женных в то чках, скоро сти которых равны нулю. Как в ид но из ра счетной схемы, таковыми являются силы
![]() .
.
Сумма мощностей остальных сил
![]() ; (1.14)
; (1.14)
или, раскрывая скалярные произведения,
![]() . (1.15)
. (1.15)
С учетом кинематиче ск их соотношений (1.7) сумму мощностей внешних сил преобразуем к виду:
 (1.16)
(1.16)
или
![]() , (1.17)
, (1.17)
где
![]() . (1.18)
. (1.18)
Величину Fпр будем называть приведенной силой.
Преобразуем выражение (1.18). Упругую силу считаем пропорциональной у длинению пр ужины. Полное удлин ение пружины f равно сумме ст атического fст и динамического SC1 удлинений
![]() ,
,

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
