

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
АНАЛИЗ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ АВТОМОБИЛЬНЫХ ШИН
, (ТИПСЭАД)
Рассмотрим вопрос моделирование произвольной шины. Анализ работ показал, что существуют несколько видов математических моделей, разработанных исходя из определенных целей.
Есть модели, в которых характеристики шины описываются очень точно с целью получения адекватного проекта шины (методы конечных элементов) или включающие корректную реакцию шин в динамическом моделировании транспортного средства (методы подобия, Магическая формула) [1].
Есть также модели, в которых шину описывают физическим способом, чтобы понять механизмы (факторы) влияющие на работу шин. Эти модели не дают очень точное соответствие с экспериментальные данными, но дают качественные характеристики.
Ясно, что оба типа моделей имеют важное значение для развития методов моделирования.
Численные методы не могут быть развиты (разрабатываться) без учета физического поведения шины, полученное через упрощенные физические модели. Результаты численных моделей не могут быть применены в инженерной практике без всестороннего испытания и экспериментальной оценки параметров.
Модель | Качественное понимание | Характеристика |
Эмпирические модели, приспособленные экспериментальные данные, Магическая формула | Физические модели с протектором, моделируемым как щетка и/или с бандажом, моделируемым как струна (нить), получения аналитической формы решения. | Легкий в обращении, малое усилие |
Модель конечных элементов | Гибкая модель бандажа (пояса), упрощенные модели МКЭ | Тяжелый в обращении, большое усилие |
Физические модели должны учитывать: фрикционные свойства системы шина-дорога; распределение нормальной силы в области контакта; жесткость каркаса (корпуса).
Кратко рассмотрим две модели, дающие представление о численных и физических моделях.
Пренебрегая жесткостью каркаса (корпуса) и предполагая равным трение Кулона с динамическим и статическим трением, получим самую простую, так называемую, модель шетки. Реакция шины к силе сдвига заменяется деформацией элементов шетки, приложенных к твердому корпусу. Эти элементы щетки – небольшие пружины, отклоненные горизонтально с определенной жесткостью пружины под действием местных усилий сдвига в области контакта (рис. 1).
Выделены две области, область прилипания, где линия контакта (соединяющая кончики элементов щетки) является прямой, и область скольжения, где напряжение сдвига соответствует закону Кулона (![]() ). Шина перемещается со скоростью
). Шина перемещается со скоростью ![]() , полученного из скорости вращения
, полученного из скорости вращения ![]() и скорости скольжения
и скорости скольжения ![]() с боковым и продольным компонентом.
с боковым и продольным компонентом.
Эти компоненты соответствуют боковому и продольному скольжению:
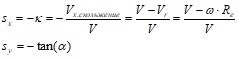 , (1)
, (1)
Деформации ![]() и
и ![]() может быть выражены математически в зависимости от скольжения, положения в области контакта, жесткости протектора, коэффициента трения и распределения давления. Из этих выражений, могут быть получены выражения для напряжения сдвига внутри области контакта.
может быть выражены математически в зависимости от скольжения, положения в области контакта, жесткости протектора, коэффициента трения и распределения давления. Из этих выражений, могут быть получены выражения для напряжения сдвига внутри области контакта.
Интегрирование по границе области контакта приводит к выражениям для боковой силы, силы тормоза, пневматического следа и вращательного момента в зависимости от скольжения (рис. 2).
Развитие транспортных средств и изменяющиеся требования к ним, привело к пониманию необходимости иметь специальные шины изготовленные для конкретного транспортного средства. Это требовала разработки управляемой модели шины, в которой данные измерения были бы переведены в свойства шины.
В 1980 году профессор Пейджка [2], предложил эмпирическую формулу, в которой эти свойства были описаны в аналитической форме (рис. 3).
![]() (2)
(2)
Это формула называется магической формулой. В этой формуле F - может быть силой тормоза или боковой силой, s – боковое или продольное скольжение. Форма кривой описывается коэффициентами B, C, D и E, которые зависят от нагрузки на колесе и угла изгиба.
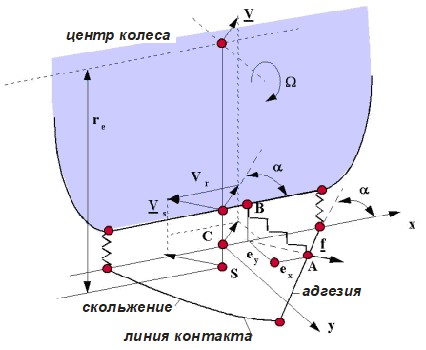
Рис. 1.
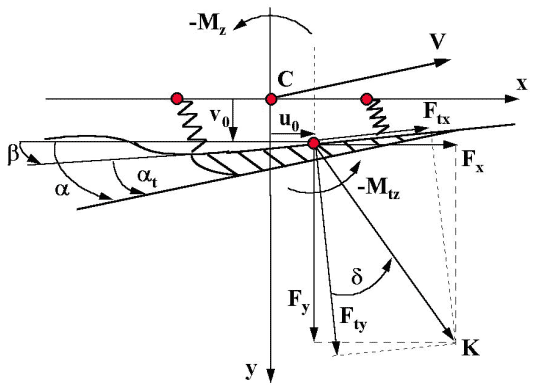
Рис. 2.
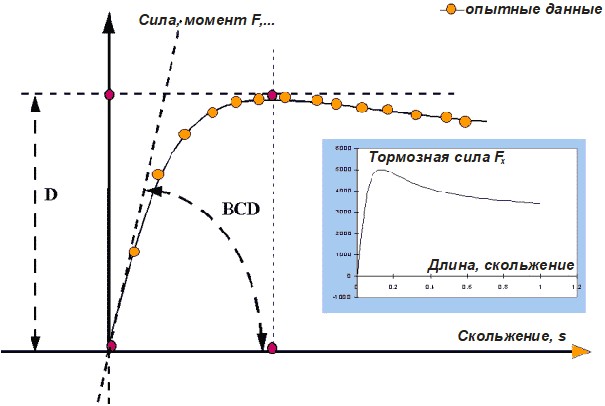
Рис. 3.
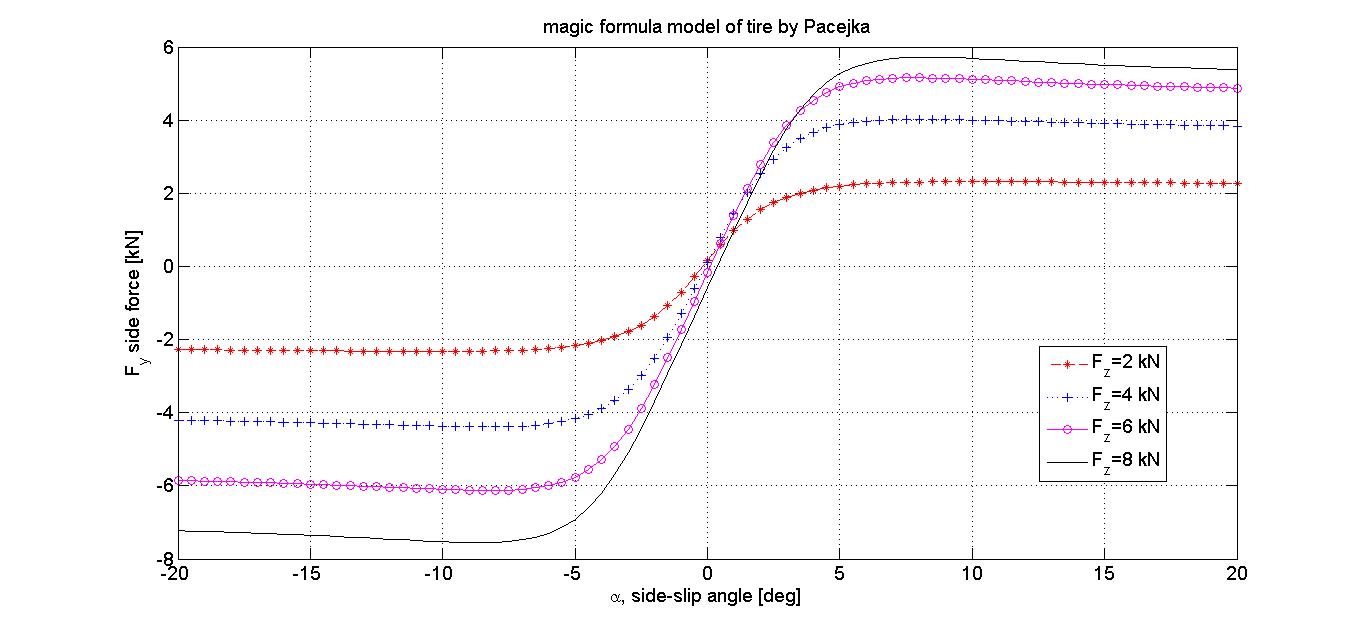
Рис.4.
Представленная формула позволяет описать полное стационарное поведение шины легкового автомобиля с ограниченном числом параметров (рис.4).
Пневматический след также может быть описан магической формулой с заменой синуса косинусом.
Таким образом, в зависимости от цели рассматриваемой задачи и требуемой точности можно выбрать необходимую математическую модель шины.
Литература:
http://www. Pacejka H. B., Tire and Vehicle Dynamics, Society of Automotive Engineers and Butterworth-Heinemann, Oxford, 2002. MATLAB. Applications for Mechanical Engineering Students. Stockholm, 2010. 344 p.