

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Таблица 8.3
Параметр, мм | Заданное смещение, мм | ||
х1 = 0 | хmin= | х2= | х3= |
Диаметр делительной окружности d = m⋅z | |||
Диаметр основной окружности db = d⋅cosα | |||
Шаг по делительной окружности р = π⋅m | |||
Шаг по основной окружности pb = p⋅cosα | |||
Диаметр вершин зубьев da = d + 2m(1 + x) | |||
Толщина зуба по делительной окружности s = m(π/2 + 2x⋅tgα) |
6. Замеренная (экспериментальная) толщина зуба по делительной окружности.
Таблица 8.4
Толщина зуба по делительной окружности | |
Значения xi, мм | Значения S, мм |
х1= | S = |
хmin= | S = |
х2= | S = |
х3= | S = |
7. Выводы:________________________________________________
___________________________________________________________
________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Подпись студента __________________
Подпись преподавателя _____________ « » 201 г.
Лабораторная работа 9
ПОСТРОЕНИЕ ЗУБЬЕВ ЭВОЛЬВЕНТНОГО ПРОФИЛЯ МЕТОДОМ ОБКАТКИ ДОЛБЯКОМ
Цель работы: ознакомиться с нарезанием цилиндрических эвольвентных зубчатых колес методом обкатки долбяком с различным смещением.
Оборудование и инструменты: приборы ТММ–47, ТММ–31, циркуль, бумажный круг, линейка, карандаш.
1. Прибор ТММ–47 № ___
| 1 – 2 – 3 – 4 – 5 – 6 – 7 – 8 – 9 – 10 – |
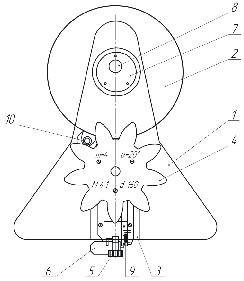
Рис.9.1
2. Заданные величины:
а) модуль m =… мм;
б) угол профиля долбяка α =… град;
в) диаметр делительной окружности d =… мм;
г) число зубьев долбяка zu = ….
3. Определение смещения долбяка.
Таблица 9.1
Смещение долбяка, мм | ||
относительное | абсолютное | увеличенное в соответствии с масштабом |
х = 0 | х⋅m = 0 | ax = 0 = 0 |
xmin = формула (9.2) | xmin⋅m = | axmin = |
xcp = формула (9.3) | xcp⋅m = | axср = |
4. Расчет основных параметров зубчатых колес для различных значений x.
Таблица 9.2
Параметры зубчатых колес | Значение | |
Смещение долбяка, мм | х = 0; xmin= ; xcp= | |
Число зубьев нарезаемого колеса |
| |
Диаметр основной окружности, мм |
| |
Шаг делительной окружности, мм |
| |
Окончание табл. 9.2 | ||
Угол станочного зацепления, град | αс= α0 = = 200 |
|
Толщина зуба по делительной окружности, мм: а) расчетная б) измеренная |
= | = |
 =
=
5.Выводы:_________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Подпись студента __________________
Подпись преподавателя _____________ « » 201 г.
Лабораторная работа № 10
Динамическая балансировка ротора
Цель работы: ознакомиться на практике с методом балансировки ротора.
Оборудование: балансировочный станок рамного типа ТММ-1А, набор грузов.
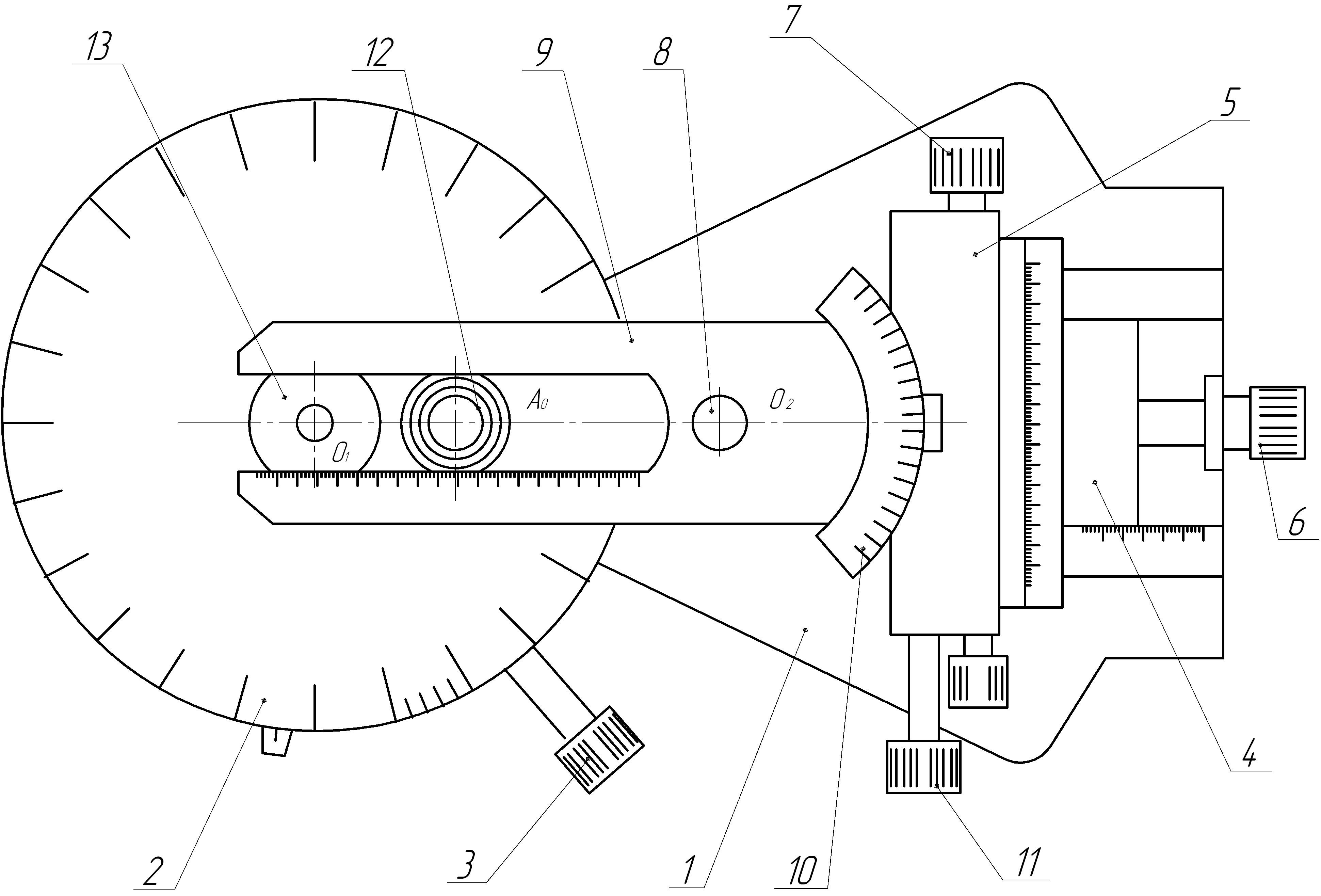
1. Схема балансировочного станка:
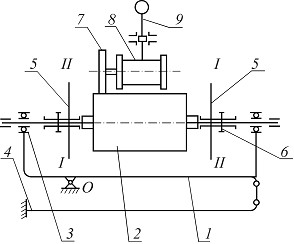

Рис. 10.1
2. Измерение амплитуды колебаний:
А1 - неуравновешенного ротора;
А2 - ротора с добавочным грузом;
А3 - ротора с добавочным грузом, радиус-вектор которого повернут на 180°.
Таблица 10.1
№ испытания | Амплитуда колебаний, мм | |
А1 | А2 | А3 |
1 | ||
2 | ||
3 | ||
|

3. Амплитуда Ад, соответствующая статическому моменту
добавочного груза
 мм
мм
4. Масса добавочного груза
тд = г
5. Расстояние центра тяжести добавочного груза от оси вращения
rд = мм
6. Дисбаланс (статический момент) добавочного груза
Dд=тд⋅ rд = … г∙мм
7. Коэффициент пропорциональности
 = г -1
= г -1
8. Начальный дисбаланс (статический момент) ротора
 = г∙мм
= г∙мм
9. Вес и положение противовеса:
а) масса МПI = г
б) модуль радиус-вектора
 = мм
= мм
в) угол α между радиус-вектором противовеса и радиус-вектром добавочного груза
 = град
= град
10. Выводы: _______________________________________________
______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Подпись студента __________________
Подпись преподавателя _____________ « » 201 г.
Лабораторная работа 11
кинематический синтез кулачкового механизма
Цель работы: научиться профилировать кулачок по заданному закону вращения коромысла ψ = ψ (φ) или заданному закону перемещения толкателя S = S(φ).
Оборудование и инструменты: прибор ТММ–21, циркуль, карандаш, линейка.
1 – 2 –
3 – 4 –
5 – 6 –
7 – 8 –
9 – 10 –
11 – 12 –
13 –
Рис.11.1
1. Практическая часть работы.
1. Вариант задания –
2. Вид движения толкателя –
3. Закон движения толкателя –
4. Исходные значения параметров для профилирования кулачка
Таблица 11.1
№ варианта | Фазовые углы кулачка, град | Угловой шаг ∆ц, град | |
цу | цвв | цпр | цнв |
Таблица 11.2
Исходные данные для синтеза кулачковых механизмов | ||||||
№ варианта | 1.Поступательно движущийся толкатель (рис. 11.1), rр = 10 мм | 2. Вращающийся толкатель (рис. 11.2) | ||||
r0 | e | Smax | А | L | ш | ш0 |
мм | мм | град | ||||
5. Построение графика ускорений, скоростей и перемещений
толкателя(см. рис. 11.4).
Н1 = мм
Н2 = мм
мs = мм/мм
мш = мм/град
6. Перемещения толкателя(Si, мм или шi, град)
Таблица 11.3
Положение | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
Si, мм | ||||||||||||||
шi, град |
7. Синтезированный профиль кулачка, построенный на приборе ТММ–21.
Рис.11.2
2.Аналитическая часть работы:
1. Расчет радиусов-векторов для принятых углов поворота кулачка и углов профиля по формулам (11.8 –11.16).
Угловой шаг ∆ц = град
Таблица 11.4
Параметр | Положения кулачка (поступательно движущийся толкатель) | ||||||||||||
0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
цi, град | |||||||||||||
бi, град | |||||||||||||
e, мм | |||||||||||||
ri, мм | |||||||||||||
r0, мм | |||||||||||||
S0, мм | |||||||||||||
Si, мм | |||||||||||||
д0, град | |||||||||||||
дi, град |
Таблица 11.5
Параметр | Положения кулачка (вращающийся толкатель) | ||||||||||||
0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
A, мм | |||||||||||||
L, мм | |||||||||||||
ш0, град | |||||||||||||
шi, град | |||||||||||||
ri, мм | |||||||||||||
r0, мм | |||||||||||||
д0, град | |||||||||||||
дi, град |
2. Построение центрового и технологического профилей кулачка на приборе ТММ–21 по расчетным данным.
Рис.11.3
3. Выводы: ________________________________________________
________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Подпись студента __________________
Подпись преподавателя _____________ « » 201 г.
Учебное издание
ЛАБОРАТОРНЫЕ РАБОТЫ ПО ТЕОРИИ МЕХАНИЗМОВ
И МАШИН
(формы отчетов)
Редактор –
Компьютерная верстка –
____________________________________________________________
Подписано в печать 16.05.2012. Формат бумаги 60х84/16. Печать RISO
Уч.-изд. л. 2,31. Усл. печ. л. 2,15. Тираж 300 экз. Заказ № 17.
____________________________________________________________________
ФГБОУ ВПО «Новосибирский государственный педагогический университет
530126, ул. Вилюйская, 28

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
