

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Рис. 1. Поведение авторегрессионной оценки ![]() при различном выборе параметра
при различном выборе параметра ![]() :
:
На рис. 1 измерения ширины отображены кружками и затем для пущей наглядности соединены пунктирной линией. Как видно из данного рисунка, при увеличении параметра ![]() кривая
кривая ![]() становится более гладкой, но перестает «успевать» за уменьшением поступающих измерений ширины
становится более гладкой, но перестает «успевать» за уменьшением поступающих измерений ширины ![]() .
.
При ![]() кривая практически повторяет измерения. Достоинство выбора данного значения параметра
кривая практически повторяет измерения. Достоинство выбора данного значения параметра ![]() в том, что он легко «успел» за уменьшением ширины объекта. Недостаток же состоит в том, что при данном значении
в том, что он легко «успел» за уменьшением ширины объекта. Недостаток же состоит в том, что при данном значении ![]() авторегрессионная оценка ширины объекта
авторегрессионная оценка ширины объекта ![]() имеет сильное «биение» в тех точках, где появляется ошибка измерений.
имеет сильное «биение» в тех точках, где появляется ошибка измерений.
При выборе значения ![]() «биение» на ошибках измерений существенно уменьшается, и эффект «запаздывания» практически не заметен.
«биение» на ошибках измерений существенно уменьшается, и эффект «запаздывания» практически не заметен.
При ![]() значение авторегрессионной оценки
значение авторегрессионной оценки ![]() очень сильно отличается от измерений и не в силах «успеть» за изменяющейся шириной объекта.
очень сильно отличается от измерений и не в силах «успеть» за изменяющейся шириной объекта.
Следовательно. в данном случае наилучшее значение параметра ![]() .
.
В то же время в примере фильтрации высоты того же объекта использование значения ![]() дает наилучший результат (рис. 2). Это, прежде всего, связано с тем, что на данной последовательности измерения высоты объекта имеют постоянное математическое ожидание. В данном случае «биение», которое вызвано лишь случайной ошибкой, присутствующей в измерении, очень хорошо сглаживается фильтром.
дает наилучший результат (рис. 2). Это, прежде всего, связано с тем, что на данной последовательности измерения высоты объекта имеют постоянное математическое ожидание. В данном случае «биение», которое вызвано лишь случайной ошибкой, присутствующей в измерении, очень хорошо сглаживается фильтром.
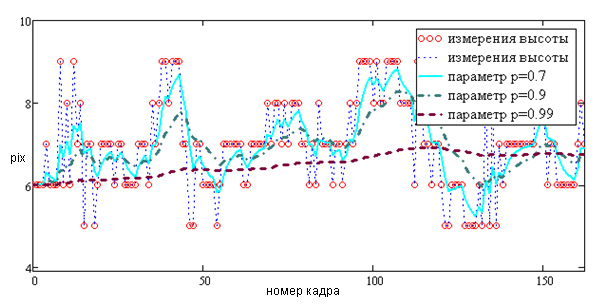
Рис. 2. Поведение авторегрессионной оценки ![]() при различном выборе параметра
при различном выборе параметра ![]()
Определение оптимальной оценки параметра по всей траекторииНеобходимо найти оптимальную оценку параметра ![]() по всей траектории. Оценка эта традиционно определяется методом наименьших квадратов.
по всей траектории. Оценка эта традиционно определяется методом наименьших квадратов.
Пусть функционал качества фильтрации имеет вид:
| (2) |

Минимум квадратичной функции (2) легко найти, приравняв к нулю ее производную. Получим
|


После преобразования окончательно находим
| (3) |
Начальное значение ![]() можно выбрать любым, например, с учетом результатов предыдущего примера, положить
можно выбрать любым, например, с учетом результатов предыдущего примера, положить ![]() При этом нужно помнить, что начальное значение
При этом нужно помнить, что начальное значение ![]() будет сказываться на последующем процессе фильтрации некоторое время с начала работы фильтра. Таким образом, итеративная схема фильтрации будет выглядеть следующим образом:
будет сказываться на последующем процессе фильтрации некоторое время с начала работы фильтра. Таким образом, итеративная схема фильтрации будет выглядеть следующим образом:
| (3) |
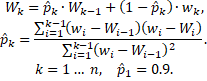
Результаты выбора оптимального в смысле критерия (3) адаптивного параметра ![]() в сравнении с предыдущими результатами для значения параметра
в сравнении с предыдущими результатами для значения параметра ![]() представлены на рис. 3 для авторегрессионной оценки ширины объекта
представлены на рис. 3 для авторегрессионной оценки ширины объекта ![]() и на рис. 4 для авторегрессионной оценки высоты объекта
и на рис. 4 для авторегрессионной оценки высоты объекта ![]() .
.
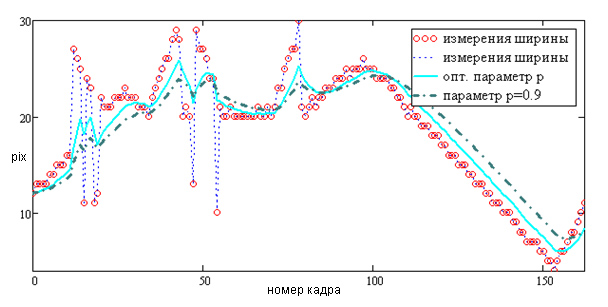
Рис. 3. Поведение авторегрессионной оценки ![]() при оптимальном значении параметра
при оптимальном значении параметра ![]() и при значении
и при значении ![]()
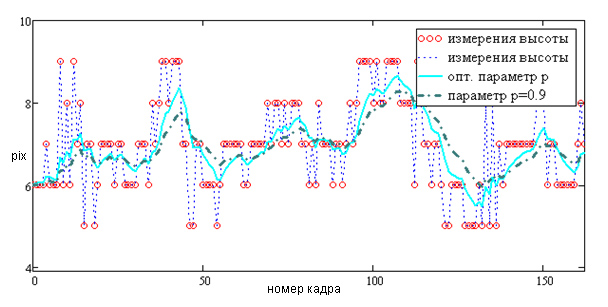
Рис. 4. Поведение авторегрессионной оценки ![]() при оптимальном значении параметра
при оптимальном значении параметра ![]() и при значении
и при значении ![]()
Из рис. 3 и рис. 4 видно, что при оптимальном в смысле критерия (3) выборе параметра фильтр становится более чувствительным, но при этом менее гладким, чем при выборе ![]() . Такой фильтр удобнее всего использовать для фильтрации третьего параметра объекта – его скорости, где наиболее важным свойством является отсутствие «запаздывания».
. Такой фильтр удобнее всего использовать для фильтрации третьего параметра объекта – его скорости, где наиболее важным свойством является отсутствие «запаздывания».
Для фильтрации же ширины и высоты, где наиболее важным является свойство «гладкости» кривой, рассмотрим следующий способ.
Повторная сглаживающая авторегрессионная фильтрация
Рассмотрим модель, которая будет фильтровать измерения, полученные с помощью оптимального авторегрессионного фильтра – модель авторегрессии второго уровня, повторно фильтрующая оценки, полученные с помощью оптимального авторегрессионного фильтра первого уровня:
| (4) |
Здесь параметр ![]() выбирается в соответствии с формулой (3), а параметр
выбирается в соответствии с формулой (3), а параметр ![]() предлагается задавать либо задавать вручную, либо также выбирать оптимальным (
предлагается задавать либо задавать вручную, либо также выбирать оптимальным (![]() ) в соответствии с формулой (5):
) в соответствии с формулой (5):
| (5) |
Смысл данного итеративного процесса таков: первое выражение осуществляет фильтрацию измерений, второе – сглаживание результатов данной фильтрации. Примеры для параметра ![]() представлены на рис. 5 и рис. 6.
представлены на рис. 5 и рис. 6.
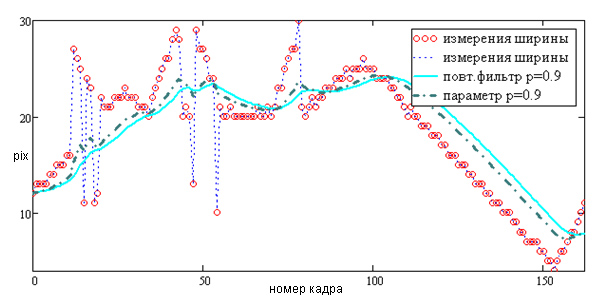
Рис. 5. Поведение повторной авторегрессионной оценки ![]() при значении параметра
при значении параметра ![]() и авторегрессионной оценки
и авторегрессионной оценки ![]() при значении
при значении ![]()
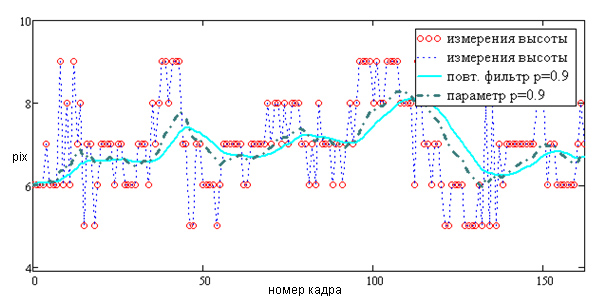
Рис. 6. Поведение повторной авторегрессионной оценки ![]() при значении параметра
при значении параметра ![]() и авторегрессионной оценки
и авторегрессионной оценки ![]() при значении
при значении ![]()
Как видно из рис. 5 и 6, кривые авторегрессионных оценок второго уровня ![]() и
и ![]() являются наиболее гладкими из всех рассмотренных. Это принципиально важно при фильтрации таких параметров как размеры объектов, поскольку плавность изменения размеров объекта важна не только при обработке поступающей информации о перемещениях объектов, но и при визуализации результатов анализа движения для оператора, осуществляющего наблюдение и принимающего дальнейшие решения.
являются наиболее гладкими из всех рассмотренных. Это принципиально важно при фильтрации таких параметров как размеры объектов, поскольку плавность изменения размеров объекта важна не только при обработке поступающей информации о перемещениях объектов, но и при визуализации результатов анализа движения для оператора, осуществляющего наблюдение и принимающего дальнейшие решения.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
