

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
, (ФГУП ГосНИИ Авиационных Систем)
Исследование поведения авторегрессионных фильтров
в задаче выделения и анализа движения на цифровых видеопоследовательностях1
В статье описаны авторегрессионная фильтрация измерений с оптимальным выбором параметра сглаживания и повторная сглаживающая авторегрессионная фильтрация для оценки параметров видимого движения и размеров объектов на изображениях. Предложен способ исследования пиксельного временного сигнала на базе вычисления кратнорегрессионных псевдоспектров для анализа оптических потоков.
Keywords: Motion analysis; Object detection; Autoregression filtering.
Введение
В статьях [1, 2] были рассмотрены основные задачи, связанные с автоматическим выделением и сопровождением объектов по признаку их движения на изображениях, получаемых от различных видеодатчиков.
В статье [1] предложена оригинальная методика выделения и межкадрового прослеживания движущихся объектов на подвижном фоне. Тестирование разработанных алгоритмов на большом объеме реальных видеоданных показало высокую эффективность использования предложенного подхода для выделения мелкоразмерных движущихся объектов, площадь которых существенно меньше площади анализируемого кадра.
Однако в большинстве систем видеонаблюдения типичной является ситуация, когда размер движущегося объекта заранее не известен, и, следовательно, система детектирования движения должна обеспечивать возможность адаптивной настройки алгоритмов на крупно-, средне - и мелкоразмерные объекты, в зависимости от задачи наблюдения, поля зрения и текущих настроек объектива камеры.
Для решения этой проблемы в статье [2] предложен так называемый «модифицированный метод оптических потоков», который является обобщением разностного подхода, предложенного в работе [3]. В рамках данного метода на этапе предобработки используются временные разностно-накопительные схемы, оптический поток вычисляется по разности накопленных изображений, движущиеся элементы изображения определяются на основе оценки накопленного оптического потока. При этом также обеспечивается статистическое межкадровое прослеживание движущихся объектов как устойчивых во времени связных групп сходно движущихся элементов изображения.
Разработанные алгоритмы обеспечивают помехоустойчивость и вычислительную эффективность на уровне ранее предложенного алгоритма для выделения мелкоразмерных движущихся объектов и, в то же время, дают возможность настройки алгоритма на выделение не только мелкоразмерных, но также средне - и крупноразмерных объектов (занимающих до 30-40% площади кадра).
Однако при практической реализации методов межкадрового прослеживания объектов, помимо задач собственно анализа последовательности цифровых изображений, рассматривавшихся в предыдущих публикациях, не меньшее значение приобретают такие задачи как оценка предельно допустимого значения контрастности движущегося объекта, при котором он может быть обнаружен на некотором фоне, а также задача статистического оценивания параметров движения объекта и его размеров.
Данная статья посвящена решению этих задач при помощи хорошо изученного аппарата авторегрессионных временных фильтров. Исследование поведения и свойств этих фильтров применительно к задаче оценивания движения на цифровых изображениях позволяет обосновать ряд новых алгоритмических решений. Также в качестве обобщения введенного ранее метода сравнения накопленных яркостей вводится понятие «кратнорегрессионных псевдоспектров».
Оценивание параметров движения и размеров видимых объектов
Поскольку фильтрация измерений в данном исследовании рассматривается применительно к измерениям размеров, координат и скоростей движущихся объектов, получаемых на основе модифицированного метода анализа оптических потоков, то применяемая процедура должна обладать следующими свойствами:
Минимальное «биение» оценок размеров и координат движущегося объекта, т. е. график, описывающий поведение оцениваемой величины, должен быть «достаточно гладким». Данное свойство наиболее важно для оценки размеров объекта, так как они часто могут измеряться ошибочно, например, при пересечении с другими объектами, частичном или полном перекрытии (заслонении) неподвижными объектами сцены наблюдения (дома, деревья, мосты и т. п.); Минимальное запаздывание оценки измерений и координат, т. е. фильтр должен «успевать» за резким изменением характера поступающих измерений, например, если объект удаляется, и его ширина и высота резко уменьшаются. Заметим, что данное свойство наиболее важно в отношении измерений скорости объекта. Робастность: фильтр должен устойчиво обрабатывать измерения с различным поведением ошибки, т. е. распределение вероятностей измерений может существенно отличаться в различных ситуациях. Например, скорость объекта может резко увеличиваться или уменьшаться, а размеры объекта при движении объекта параллельно плоскости кадра в большинстве случаев будут постоянны с точностью до ошибки измерений. В то же время, при развороте объекта его размеры также могут резко меняться одновременно с изменением скорости.Для фильтрации размеров объекта предлагается использовать процедуру авторегрессии первого порядка [4,5]. Фильтрация, основанная на моделях авторегрессии, хороша тем, что является наиболее робастной при работе с объектами, для которых полностью отсутствует априорная информация об оцениваемых параметрах.
Порядок авторегрессии был выбран минимальным – первым – из-за того, что при повышении порядка модели начинает проявляться эффект существенного «запаздывания» оценки. Если измерения скорости объекта начали резко возрастать (например, объект стал разгоняться), то авторегрессионная оценка скорости второго или более высокого порядка будет достаточно продолжительное время сильно отличаться от действительного наблюдаемого значения, что в данном случае неприемлемо с точки зрения практической применимости систем анализа движения.
Найдем методом авторегрессии оценки ширины ![]() , высоты
, высоты ![]() вектора скорости
вектора скорости ![]() некоторого объекта на видеопоследовательности на
некоторого объекта на видеопоследовательности на ![]() -м кадре, исходя из оценки, полученной на предыдущем
-м кадре, исходя из оценки, полученной на предыдущем ![]() -м кадре, и измерения, полученного на
-м кадре, и измерения, полученного на ![]() -м кадре.
-м кадре.
| (1) |
Здесь ![]() – параметры авторегрессионного фильтра;
– параметры авторегрессионного фильтра;
![]() - случайные величины, имеющие смысл фильтрованных измерений ширины, высоты и скорости соответственно на
- случайные величины, имеющие смысл фильтрованных измерений ширины, высоты и скорости соответственно на ![]() -м кадре;
-м кадре;
![]() – измерения ширины, высоты и скорости на
– измерения ширины, высоты и скорости на ![]() -м кадре.
-м кадре.
Таким образом, ![]() в зависимости от
в зависимости от ![]() есть случайные процессы авторегрессии первого порядка.
есть случайные процессы авторегрессии первого порядка.
Очевидно, что результаты, полученные для любого одного из трех выражений (1), могут быть легко обобщены на все три выражения (1) из-за аналогичности структуры. Возьмем первое выражение из (1) и попробуем обосновать некоторую близкую к оптимальности стратегию выбора параметра ![]()
Рассмотрим сначала на нескольких характерных примерах, как изменяется поведение авторегрессионного фильтра в зависимости от значения параметра ![]()
Пусть ![]() . Легко заметить, что при выборе параметра
. Легко заметить, что при выборе параметра ![]() достаточно близким к единице влияние нового измерения
достаточно близким к единице влияние нового измерения ![]() практически сводится к нулю, а новая оценка
практически сводится к нулю, а новая оценка ![]() практически полностью базируется на старой оценке
практически полностью базируется на старой оценке ![]() Такой выбор параметра делает график последовательности
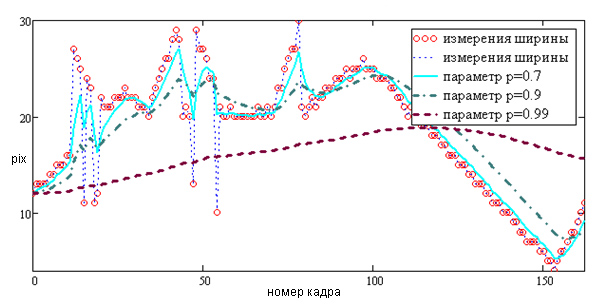
Такой выбор параметра делает график последовательности ![]() наиболее гладким, но при этом фильтр становится очень инерционным, т. е. при резком изменении характера измерений (например, ширина объекта стала резко меняться) фильтр «не успевает» за измерениями и дает слишком сильную погрешность относительно истинной траектории. На рис. 1. показаны измерения ширины объекта на видеопоследовательности в течение 160 кадров, построены графики
наиболее гладким, но при этом фильтр становится очень инерционным, т. е. при резком изменении характера измерений (например, ширина объекта стала резко меняться) фильтр «не успевает» за измерениями и дает слишком сильную погрешность относительно истинной траектории. На рис. 1. показаны измерения ширины объекта на видеопоследовательности в течение 160 кадров, построены графики ![]() для значений параметров
для значений параметров ![]()
![]() ,
, ![]()


|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
