

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
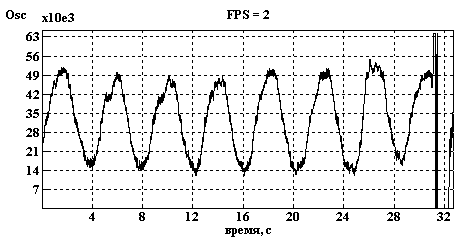
Рис.2
Для наглядного сравнения на Рис.3 приведен спектр этого сигнала и Ар-спектр. Как видно из рисунка
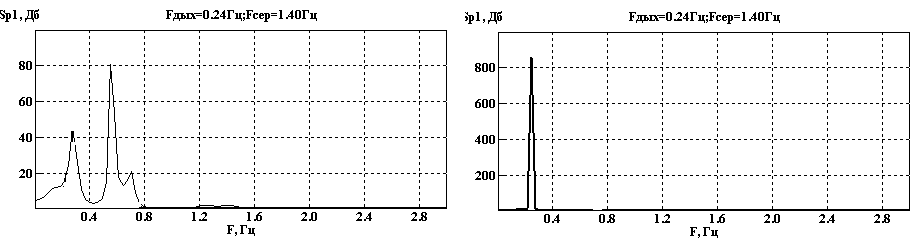
Рис.3
Точность оценки частот спектра при помощи АР-модели зависит от выбора ее порядка. Получено, что оптимально порядок должен быть не больше одной трети числа выборок всего сигнала.
Цифровая обработка принятого сигнала была реализована на микроконтроллере серии AVR. Вычисление БПФ велось в режиме реального времени по 128 точкам. По этому спектру производилась оценка частот дыхания и сердцебиения человека, его скорости движения. По уровню отраженного сигнала велась оценка того, какой размер объекта. По форме сигнала во временной области велась оценка направления движения объекта.
Основные эксперименты, проделанные с макетом радар: обнаружение и сопровождение движущегося объекта, определение направление движения, скорости движения, оценка частот сердцебиения и дыхания человека находящегося за непрозрачным диэлектрическим препятствием (кирпичная стена). Применение метода сверхразрешения для улучшения выделения частоты сердцебиения из спектра принятого сигнала. Для возможной последующей идентификации была построена экспериментальная зависимость скорости человека от времени.
Планируется провести процесс идентификации цели: человек, машина, животное. Идентификация может быть основана на таких признаках как: скорость движения, наличие или отсутствие в спектре отклика цели характерных частот сердцебиения и дыхания, присущих живым существам, величина амплитуды отклика объекта, закон изменения скорости объекта от времени. Зависимость скорости человека от времени была выявлена на практике. Она имеет характерные периодические колебания. Такое изменение скорости связано с маятникообразным движением таза человека. Существует также возможность идентификации человека при помощи сравнения отклика от эталонного объекта с откликом от данного человека. Эталонный отклик может быть получен путем моделирования процесса отражения сигнала от модели движущегося человека. Данная модель обладает так называемыми “блестящими точками” размещенными в области головы, плеч, локтей, таза, коленей и т. д. При отражении от этих блестящих точек формируется “портрет цели” несущий в себе информацию о форме цели. Модель получена путем установки на человека в основные точки маячков, траектории которых при перемещении человека снимаются на камеру [11]. По результатам тестирования большого количества людей и создана модель движения человека. Планируется ее доработать блестящими точками.
Литература
1. Federal Communications Commission (USA), Revision of Part 15 of the Commission’s Rules Regarding Ultra-Wideband Transmission Systems. First Report and Order. – FCC 02-48, April 22, 2002.
2. Federal Communications Commission (USA), Radio frequency devices. – 47 CFR, Part 15, October 01, 2003.
3. , Радиотехнические цепи и сигналы: Учебник для вузов. – М.: Радио и связь, 1986. – 512с.: ил.
4. http://uwb.
5. , Сверхширокополосные радары, Вестник МГТУ, №4,1998.
6. James. D Taylor, P. E. Ultra-wideband radar technology, 2000.
8. , «Теоретические основы статистической радиотехники», 1989.
9. , Цифровой спектральный анализ и его приложения. Москва: Мир, 1990.
10. T. E. McEvan, US Patents: №5,361,070; №5,517,198; №5,523,760.
11. www.
-----♦-----
The estimation of parameters of moving targets by means of ultra wide band radar
Evlampiev V., Silivakin A., Goriunsov I.
Yaroslavl state university of Demidov
The problem of distance radiomonitoring by means of ultra wide band (UWB) flexing of space is consist of getting the information about the object from reflected electromagnetic field. And field space-time structure is very difficalt and at the same time very informative. UWB signal processing is difficalt in analog kind, therefore appllying powerful computation system what is realize primary and secondary digital signal processing.
We was developed model of UWB radar which realize space sounding by ultrashort pulses with front lenth about a fuw nanosecond and then receive reflected pulses using stroboscopic receiver. Due to application of this signals increases stability of radar to influence of all kinds passive noise. Also simplifies moving target observation and increases distance resolution.
In our radar digital signal prossesing can be realized as by means of PC, as by means of microcontroller. First power of received signal is thresholding. If threshold is crossed than signal samples storage is realized. The calculation of speed is realized by twu methods. In the first method the signal is analized in time domain and it is calculation based on phase changing during propagating. In the second method signal is analized in frequency domain. The largest value in spectrum is correspond to the target speed.
Defining the driving direction is defined with the shape of response. If amplitude of envelope function is fluently increase and then it is sharply subside. It means that the target is moves with range rate directed from radar system. And conversely for reverse law of variation of the envelope. And as consistent with it law the algorithm of defining the driving direction was developed.
Defining the respiration and palpitation rate is realized by two methods also. The first is based on fast Fourier transformation (FFT) and filtration of respiration harmonics. The amplitude of respiration harmonics is greater than amplitude of palpitation harmonics as the scattering cross-section (SCS) of thorax greater than SCS of heart. Respiration harmonics are filtering for more convenient visualization of thorax spectral line. The second method is is based on using of super-resolution method. The autoregressive scheme (AS) allow to get more accurate estimation of power spectral density (PSD), than it is possible by using classical approach of spectrum analysis. This method allow to get more spectral resolution and spectrum with edged peaks but with out deep cavityes. Finding the coefficients of autoregression is based on minimizing of average value of squared prediction forward and back errors by using least-squares procedure. This process is named modified covariance method. The fast finding coefficients algorithm is taken from Marpl book.
This is the list of the main experiments with UWB radar model: detection and accompaniment of moving object, defining moving direction, speed of the object, defining the respiration and palpitation rate of the man which is situated behind the wall. Also was used super-resolution method for best discrimination of palpitation frequency from spectrum of received signal. Was also constructioned dependence of speed on time for capability of following identification of objects.
We are planing to make the identification of this objects: man, car, animal. The identification is also possible by rate of movemen, by object response amplitude, by frequences of palpitation and respiration. We also would like to get the model of reflecting from moving man UWB pulses. On this model we would like to get the model of reflected from man signal and to identificate man by this model of reflected signal.
-----♦-----
МОДИФИЦИРОВАННЫЙ МЕТОД НАИМЕНЬШИХ КВАДРАТОВ ПРОНИ, ИСПОЛЬЗУЮЩИЙ ИТЕРАЦИОННЫЙ МЕТОД ШТЕЙГЛИЦА - МАКБРАЙДА
,
Рязанский государственный радиотехнический университет
Предлагаемая модификация метода наименьших квадратов Прони (МНКП) позволяет повысить эффективность оценки параметров для процессов, состоящих из смеси синусоид и белого шума. В МНКП для увеличения разрешающей способности по частоте с целью повышения точности измерения рекомендуется увеличивать величину порядка модели ![]() [1] больше требуемого его минимального значения
[1] больше требуемого его минимального значения ![]() , которое определяется количеством синусоидальных компонент
, которое определяется количеством синусоидальных компонент ![]() , присутствующих в обрабатываемом процессе. Это в свою очередь приводит к появлению в спектре дополнительных ложных спектральных пиков, которые под воздействием шума могут превысить по интенсивности спектральные пики синусоид. Появление ложных спектральных пиков может служить причиной возникновения выбросов в результатах измерений, которые будут возникать вследствие ошибочного принятия ложного спектрального пика за спектральный пик полезного сигнала. Данное обстоятельство приводит не только к усложнению процедур поиска спектральных пиков синусоид, но и к увеличению вычислительных затрат и объема памяти требуемых при реализации МНКП. Поэтому возникает желание сохранить положительные стороны МНКП, который обеспечивает высокое разрешение по частоте, не увеличивая порядок модели больше требуемого
, присутствующих в обрабатываемом процессе. Это в свою очередь приводит к появлению в спектре дополнительных ложных спектральных пиков, которые под воздействием шума могут превысить по интенсивности спектральные пики синусоид. Появление ложных спектральных пиков может служить причиной возникновения выбросов в результатах измерений, которые будут возникать вследствие ошибочного принятия ложного спектрального пика за спектральный пик полезного сигнала. Данное обстоятельство приводит не только к усложнению процедур поиска спектральных пиков синусоид, но и к увеличению вычислительных затрат и объема памяти требуемых при реализации МНКП. Поэтому возникает желание сохранить положительные стороны МНКП, который обеспечивает высокое разрешение по частоте, не увеличивая порядок модели больше требуемого ![]() . Данную задачу предлагается решить, модифицируя МНКП с помощью итерационного метод Штейглица – МакБрайда (ИМШМ) [2]. Предложенный авторами К. Штейглицом и Брайдом итерационный метод предназначен для идентификации линейных систем (ЛС) по входным и выходным отсчетам в присутствии аддитивного шума с помощью минимизации среднеквадратической ошибки между системой и ее выходной моделью. В качестве модели в данном методе выбрана линейная модель, которая предполагает, что входные и выходные отсчеты связаны рациональным z-преобразованием вида
. Данную задачу предлагается решить, модифицируя МНКП с помощью итерационного метод Штейглица – МакБрайда (ИМШМ) [2]. Предложенный авторами К. Штейглицом и Брайдом итерационный метод предназначен для идентификации линейных систем (ЛС) по входным и выходным отсчетам в присутствии аддитивного шума с помощью минимизации среднеквадратической ошибки между системой и ее выходной моделью. В качестве модели в данном методе выбрана линейная модель, которая предполагает, что входные и выходные отсчеты связаны рациональным z-преобразованием вида ![]() , где
, где ![]() ,
, ![]() .
.
При идентификации ЛС ИМШМ решается задача минимизации ошибки, которую можно записать в виде ![]() , (1)
, (1) ![]() ,
, ![]() , где
, где ![]() - отсчеты на входе системы;
- отсчеты на входе системы; ![]() - отсчеты на выходе системы. В (1) суммирование выполнено по длине записи, а интегрирование производится по единичной окружности.
- отсчеты на выходе системы. В (1) суммирование выполнено по длине записи, а интегрирование производится по единичной окружности.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
