

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Для того чтобы осуществить данную модификацию МНКП необходимо вначале изменить вычислительную реализацию МНКП [1]. Данные изменения предлагается осуществить, используя способ организации вычислений, основанный на методике вычисления параметров рекурсивного фильтра (РФ) МНКП, который приведен в [3]. Также можно использовать и другой подход, приводящий к той же вычислительной реализации. Если сравнить соотношения межу параметрами линейного предсказания в МНКП [1] и авторегрессии АР [1], то можно интерпретировать первый и второй этапы при реализации МНКП как процедуру вычисления полюсов некоторого АР – процесса, при условии, что в качестве входного процесса рассматривается не белый шум, а единичный импульс. То есть любой метод спектрального анализа с использованием АР - или АРСС - моделей, который предусматривает определение полюсов, можно в некотором широком смысле рассматривать как процедуру Прони [1].
При такой вычислительной организации реализация первого и второго этапов МНКП (нахождение корней ![]() характеристического полинома с коэффициентами
характеристического полинома с коэффициентами ![]() ) будет заключатся в вычислении полюсов передаточной функции (ПФ) РФ, который имеет вид
) будет заключатся в вычислении полюсов передаточной функции (ПФ) РФ, который имеет вид
![]() , (2), где
, (2), где ![]() -отсчеты импульсной характеристики;
-отсчеты импульсной характеристики; ![]() .
.
При этом синтез данного РФ должен быть осуществлен при условии равенства нормированных отсчетов входного процесса, состоящей из смеси синусоид и белого шума ![]() ,
, ![]() ,
, ![]() и отсчетов импульсной характеристики
и отсчетов импульсной характеристики ![]() ,
, ![]() .
.
Вычисление параметров ПФ данного РФ и предлагается осуществлять с использованием ИМШМ. Для этого в качестве модели в данном методе необходимо выбрать модель ![]() , порядок которой совпадает с порядком РФ, то есть
, порядок которой совпадает с порядком РФ, то есть
![]() ,
, ![]() . (3)
. (3)
Применительно к рассматриваемой задаче на вход ЛС, то есть РФ, необходимо подать «единичный импульс» ![]() . На выходе ЛС при этом будут отсчеты импульсной характеристики
. На выходе ЛС при этом будут отсчеты импульсной характеристики ![]() , первые
, первые ![]() из которых нам известны, так как они выбраны равными соответствующими отсчетам
из которых нам известны, так как они выбраны равными соответствующими отсчетам ![]() . При этом задача минимизации ошибки (1) запишется в виде
. При этом задача минимизации ошибки (1) запишется в виде
![]() , (4)
, (4) ![]() ,
, ![]() .
.
Видно, что выражение (4) достигнет своего минимума, когда коэффициенты модели (3) ![]() и
и ![]() совпадут с соответствующими коэффициентами
совпадут с соответствующими коэффициентами ![]() и
и ![]() ПФ
ПФ ![]() РФ (2). То есть, вычислив параметры модели (3) с помощью ИМШМ, определяем искомые коэффициенты РФ. Минимизирующее сумму квадратов ошибок
РФ (2). То есть, вычислив параметры модели (3) с помощью ИМШМ, определяем искомые коэффициенты РФ. Минимизирующее сумму квадратов ошибок ![]() по каждому параметру
по каждому параметру ![]() ,
, ![]() решение можно получить, решив уравнение [2]
решение можно получить, решив уравнение [2] ![]() ,
, ![]() , (5), применяя соответствующие линейные процедуры наименьших квадратов [4].
, (5), применяя соответствующие линейные процедуры наименьших квадратов [4].
Далее необходимо вычислить полюса ![]() ПФ (2), что можно осуществить с помощью решения нелинейной задачи на собственные значения [4]. Используя полюса можно вычислить коэффициенты затухания и частоты синусоид по выражениям, приведенным в [1].
ПФ (2), что можно осуществить с помощью решения нелинейной задачи на собственные значения [4]. Используя полюса можно вычислить коэффициенты затухания и частоты синусоид по выражениям, приведенным в [1].
На следующем этапе необходимо найти вектор неизвестных комплексных амплитуд ![]() , который даст оценки амплитуд экспонент и начальных фаз синусоид [1]. Найти вектор комплексных амплитуд
, который даст оценки амплитуд экспонент и начальных фаз синусоид [1]. Найти вектор комплексных амплитуд ![]() можно, разложив ПФ (2) на простые дроби. Разложение ПФ на простые дроби, если нет повторяющихся полюсов, запишется в следующем виде
можно, разложив ПФ (2) на простые дроби. Разложение ПФ на простые дроби, если нет повторяющихся полюсов, запишется в следующем виде ![]() . В случае повторяющихся полюсов необходимо использовать следующую запись
. В случае повторяющихся полюсов необходимо использовать следующую запись ![]() , где l-количество повторяющихся полюсов.
, где l-количество повторяющихся полюсов.
Коэффициенты разложения вычисляются по следующему выражению ![]() ,
, ![]() (6), где
(6), где ![]() - производная от знаменателя ПФ.
- производная от знаменателя ПФ.
Найдя коэффициенты разложения ![]() можно, вычислить амплитуды и начальные фазы по выражениям, приведенным в [1].
можно, вычислить амплитуды и начальные фазы по выражениям, приведенным в [1].
Рассмотрим причину, по которой модифицированный МНКП обеспечивает выигрыш по отношению к МНКП. Для этого перепишем выражение (4) в виде ![]() (7). где
(7). где ![]() - отсчеты импульсной характеристики фильтра с ПФ вида (3).
- отсчеты импульсной характеристики фильтра с ПФ вида (3).
Сравнивая выражения (4) и (7) можно увидеть, что минимизация выражения (4) является эквивалентным минимизации суммы квадратов ошибок между отсчетами импульсной характеристикой модели ![]() и отсчетами заданной импульсной характеристики
и отсчетами заданной импульсной характеристики ![]() , у которой
, у которой ![]()
![]() . Другими словами производится минимизация квадратичной ошибки воспроизведения заданной бесконечной импульсной характеристики по её явно заданному начальному участку. В отличие от МНКП, который стремится наиболее точно представить только первый заданный участок импульсной характеристики из
. Другими словами производится минимизация квадратичной ошибки воспроизведения заданной бесконечной импульсной характеристики по её явно заданному начальному участку. В отличие от МНКП, который стремится наиболее точно представить только первый заданный участок импульсной характеристики из ![]() отчетов, не учитывая характер поведения остальных. Данное обстоятельство и то, что решение уточняется итерационно, является основополагающим в обеспечении выигрыша, модифицированным МНКП по отношению к МНКП.
отчетов, не учитывая характер поведения остальных. Данное обстоятельство и то, что решение уточняется итерационно, является основополагающим в обеспечении выигрыша, модифицированным МНКП по отношению к МНКП.
Использование ИМШМ при реализации МНКП, позволяет исключить ряд недостатков, которыми обладал МНКП. Получаемый выигрыш при этом выражается в следующем:
Обеспечивается при минимально требуемом значении порядка модели такая же точность оценки параметров синусоид, как и при использовании МНКП с порядком модели превышающейРазработка модификации МНКП преследовало на практике в полнее определенную цель - повышение точности и надежности измерения дальности до уровня материала в резервуаре с помощью ЧМ дальномера при наличии мешающих отражений (МО) от элементов конструкций резервуара и его дна [5].
При измерении дальности до уровня материала необходимо решит следующие задачи:
1. Поиск в спектре среди множества спектральных пиков, которые вызваны наличием МО, спектрального пика, соответствующего отражениям от уровня материала;
2. Обеспечение высокого разрешение по частоте (дальности), необходимое для высокоточного измерения дальности при наличии близко расположенного МО (например, отражения от дна резервуара при приближении уровня материала ко дну).
Попытка решения одновременно первой и второй задачи с помощью МНКП усложняется тем, что при увеличении порядка модели с целью увеличения разрешения в спектре (помимо МО) появляются ложные спектральные пики, что существенно затрудняет поиск спектрального пика, соответствующего отражениям от уровня материала [5]. Приведенная модификация МНКП решает данную проблему.
На рис. 1 приведена зависимость погрешности измерения дальности до уровня материала ![]() от расстояния
от расстояния ![]() , то есть между местом возникновения МО
, то есть между местом возникновения МО ![]() и положением уровня
и положением уровня ![]() . Моделирование проведено при отношении сигнал-шум
. Моделирование проведено при отношении сигнал-шум ![]() . Отношение амплитуд сигнала и МО равно 0.5. Порядок модели выбран
. Отношение амплитуд сигнала и МО равно 0.5. Порядок модели выбран![]() , а количество отсчетов сигнала биений
, а количество отсчетов сигнала биений ![]() [5].
[5].
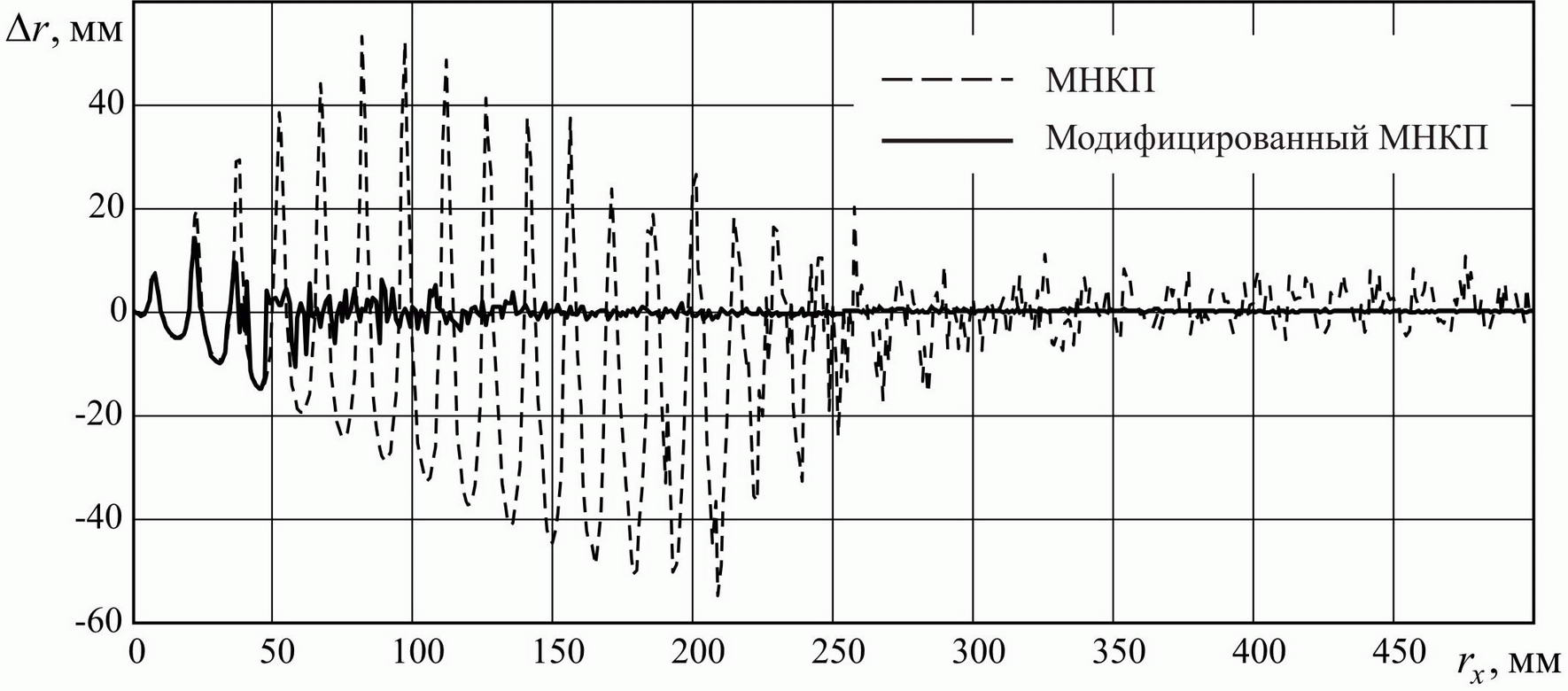
Рис. 1. Погрешность измерения дальности при наличии МО
Из рис. 1 видно, что модифицированный МНКП обеспечивает существенный выигрыш по точности измерения дальности при ![]() по отношению к МНКП. Для того чтобы обеспечить с помощью МНКП такую же точность измерения, необходимо увеличить величину порядка модели до
по отношению к МНКП. Для того чтобы обеспечить с помощью МНКП такую же точность измерения, необходимо увеличить величину порядка модели до ![]() , что приводит к отмеченным выше недостаткам. Данный результат подтверждается и на реальных сигналах полученных с ЧМ – дальномера, работающего в промышленных условиях.
, что приводит к отмеченным выше недостаткам. Данный результат подтверждается и на реальных сигналах полученных с ЧМ – дальномера, работающего в промышленных условиях.
Литература
Марпл. – мл. спектральный анализ и его приложения: Пер. с англ. – М.: Мир, 1990. – 584с. Steiglitz, K., and L. E. McBride, A Technique for the Identification of Linear Systems, IEEE Trans. Automatic Control, Vol. AC-10, 1965, pp. 461-464. Parks, T. W., and C. S. Burrus, Digital Filter Design, John Wiley & Sons, 1987, pp. 228-232. Деммель Дж. Вычислительная линейная алгебра. Теория и приложения. Пер. с англ. – М.: Мир, 2001. – 403с. , Измерение расстояния до уровня материала в резервуаре при наличии мешающих отражений от его дна, превышающих по интенсивности полезный сигнал. Труды 8-МК ЦОС Т1. М.: РНТОРЭС им. Попова, 2006. С.306-308.-----♦-----

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
