

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Оценка параметров движущихся целей при помощи сверхширокополосного радара
, ,
Ярославский государственный университет имени
Задача дистанционного радиоконтроля при помощи сверхширокополосного зондирования пространства состоит в получении информации об объекте наблюдения путём вычисления характеристик отраженного электромагнитного поля, пространственно-временная и поляризационная структуры которого представляют наиболее сложный и емкий из используемых в техн ике носителей информации.
Важной отличительной чертой СШП РЛС является принцип иальная необходимость их оснащения развитой вычислительной системой. Это вызвано тем, что создание аппаратуры СШП РЛС, удовлетворяющей жестким требованиям к равномерности частотной характеристики СВЧ тракта в полосе частот в несколько гигагерц, оказывается технически невозможным и экономически неоправданным. Поэтому вычислительная система РЛС используется для коррекции характеристик аппаратуры. Так же вычислительная система (ЭВМ) обрабатывает огромный объем информации с требуемой точностью. Осуществляется первичная и вторичная обработка отраженного от объекта сигнала. Таким образом, использование СШП радиолокационных сигналов образует самостоятельное направление в радиолокационной технике.
Целью данной работы являлась разработка сверхширокополосной РЛС. Планировалось создать систему, которая благодаря своим небольшим размерам, простоте в эксплуатации и простым схемным решениям будет достаточно конкурентоспособной на рынке.
На данный момент разработан макет сверхширокополосного радара, в котором применяется цифровая обработка радиосигналов. Методы, которые применяются в данном макете, будут рассмотрены далее.
Рассмотрим принцип работы СШП радара. В качестве зондирующего сигнала в радаре используются сигналы с относительной полосой частот излучения больше чем 0,2. Относительная полоса частот при этом, определяется по формуле: ![]() , (1), где верхняя fВ и нижняя fН частоты спектра определяются по уровню – 10 дБ относительно максимума излучения.
, (1), где верхняя fВ и нижняя fН частоты спектра определяются по уровню – 10 дБ относительно максимума излучения.
К основным видам сигналов, используемых в моноимпульсных СШП локаторах, относятся импульсы, описываемые гауссовой функцией и производными её высших порядков. Порядок производной определяет форму импульса. Применение сигналов данного типа с длительностью по полувысоте порядка 0,1 – 2 наносекунды позволяет существенно повысить разрешающую способность и точность измерения расстояния до объекта наблюдения, уменьшить "мертвую зону" радара, увеличить его устойчивость к воздействию всех видов пассивных помех и упростить наблюдение за движущейся целью на фоне сильных отражений от неподвижных объектов. Схемные решения, использованные при построении СШП радара технически значительно проще схемных решений, применяемых в узкополосных радарах. Это позволяет уменьшить его габариты и снизить себестоимость.
Контролируемая зона зондируется последовательностью сверхкоротких импульсов (СКИ) длительностью ф < 1 нс, последующем приёме отражённых сигналов и их обработке. Импульсы следуют с периодом повторения ![]() порядка 1 мкс, определяемым Тактовым генератором. По фронту тактового сигнала Формирователь импульсов 1 формирует короткие гауссовы импульсы, которые возбуждают передающую антенну. В результате в пространство излучается электромагнитная энергия в виде сферы конечной толщины
порядка 1 мкс, определяемым Тактовым генератором. По фронту тактового сигнала Формирователь импульсов 1 формирует короткие гауссовы импульсы, которые возбуждают передающую антенну. В результате в пространство излучается электромагнитная энергия в виде сферы конечной толщины ![]() , где
, где ![]() - скорость света. Чем меньше длительность импульса, тем выше разрешающая способность радара по дальности. Длительность импульса, управляющего стробоскопическим преобразователем (выход Формирователя импульсов 2) определяет верхнюю границу частоты в спектре принимаемого сигнала и так же определяет разрешающую способность по дальности. Обычно длительность этого импульса выбирается меньше длительности импульса передатчика. Селекция объектов по дальности осуществляется путём установки временной задержки стробирования приёмника относительно момента формирования зондирующего импульса. Далее происходит выборка входного сигнала в перемножителе стробирующего импульса и входного сигнала, который является фазовым детектор, измеряющим разность фаз задержанного и принятого сигнала. Далее сигнал поступает на ФНЧ и происходит оцифровка сигнала в АЦП. Затем выборки сигнала поступают в ЭВМ для выделения информации об объекте.
- скорость света. Чем меньше длительность импульса, тем выше разрешающая способность радара по дальности. Длительность импульса, управляющего стробоскопическим преобразователем (выход Формирователя импульсов 2) определяет верхнюю границу частоты в спектре принимаемого сигнала и так же определяет разрешающую способность по дальности. Обычно длительность этого импульса выбирается меньше длительности импульса передатчика. Селекция объектов по дальности осуществляется путём установки временной задержки стробирования приёмника относительно момента формирования зондирующего импульса. Далее происходит выборка входного сигнала в перемножителе стробирующего импульса и входного сигнала, который является фазовым детектор, измеряющим разность фаз задержанного и принятого сигнала. Далее сигнал поступает на ФНЧ и происходит оцифровка сигнала в АЦП. Затем выборки сигнала поступают в ЭВМ для выделения информации об объекте.
Рассмотрим методы цифровой обработки сигналов примененные при обработке принятого отклика цели более подробно. При обнаружении [6] цели производится вычисление мощности сигнала по следующей формуле: ![]() . (2) Далее сравнивается полученное значение
. (2) Далее сравнивается полученное значение ![]() с порогом, заданным исходя из уровня шума на выходе приемника в отсутствии полезного сигнала. Каждый раз значение порога разное. Если порог превышен, то происходит накопление выборок сигнала для последующей обработки.
с порогом, заданным исходя из уровня шума на выходе приемника в отсутствии полезного сигнала. Каждый раз значение порога разное. Если порог превышен, то происходит накопление выборок сигнала для последующей обработки.
Для определения скорости объекта производится накопление выборок сигнала превышающего порог обнаружения и по приведенной формуле в каждом полупериоде производится подсчет скорости объекта: ![]() . (3) Данная формула получена из учета того, что объект движется с радиальной составляющей скорости перемещения
. (3) Данная формула получена из учета того, что объект движется с радиальной составляющей скорости перемещения ![]() ,
, ![]() - резонансная (центральная) частота антенны. В каждом полупериоде получается своя скорость. Путем усреднения по нескольким полупериодам получаем среднюю скорость объекта.
- резонансная (центральная) частота антенны. В каждом полупериоде получается своя скорость. Путем усреднения по нескольким полупериодам получаем среднюю скорость объекта.
Так же возможно определение скорости объекта путем анализа его отклика в частотной области. После нахождения быстрого преобразования Фурье (БПФ) максимуму в спектре сигнала соответствует скорость объекта. Скорость находим по следующей формуле: ![]() . (4)
. (4)
Для определения направления движения в радаре производится анализ сигнала во временной области. Экспериментальным путем была замечена особенность в форме отраженного импульса от человека (Рис.1). На левом графике видна тенденция огибающей отклика к плавному увеличению амплитуды и последующему резкому спаду, на правом графика обратная тенденция. Левый график соответствует движению человека от радара, а правый - на радар. Благодаря данной особенности и был разработан соответствующий метод анализа отклика во временной области и определения направления движения объекта.
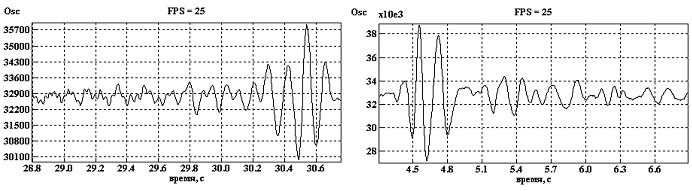
Рис.1
Оценка частот сердцебиения и дыхания производится путем анализа принятого сигнала двумя методами. Анализ производится в частотной области. В первом методе после накопления сигнала нужной длительности производится вычисление БПФ и построение спектра. Максимум на интервале от 0.1 до 1 Гц соответствует частоте дыхания человека. При этом, так как площадь грудной клетки много больше площади сердца, то и амплитуда спектральной линии соответствующей дыханию больше амплитуды спектральной лини сердца. При этом в спектре присутствует большое количество гармоник дыхания, которые могут накладываться на линию сердцебиения и затрудняют определение этой линии. Производится фильтрация этих гармоник вплоть до 10 гармоники.
Второй метод основан на методе сверхразрешения [9]. В этом методе для определения частоты сердцебиения и дыхания используется модель авторегрессионного процесса (АР). Одна из причин применения параметрической модели АР процесса обусловлена возможностью получения на основе этой модели более точных оценок спектральной плотности мощности (СПМ), чем это возможно при помощи классического метода спектрального оценивания. Вторая причина – большее спектральное разрешение. Третья причина – получение спектров с острыми пиками, но без глубоких впадин.
АР модель описывается выходом фильтра, выражаемым линейным разностным уравнением с комплексными коэффициентами: ![]() (5), где
(5), где ![]() - последовательность на выходе фильтра,
- последовательность на выходе фильтра, ![]() - входная возбуждающая последовательность (белый шум),
- входная возбуждающая последовательность (белый шум), ![]() - параметры характеризующие авторегрессию.
- параметры характеризующие авторегрессию.
Пусть есть исходная синусоидальная последовательность, состоящая из бесконечного числа отсчетов. Спектр исходной последовательности состоит из одной частотной составляющей соответствующей синусоиде и белого шума. Реальные сигналы имеют конечную во времени длину. Для того чтобы из конечной последовательности сделать бесконечную применяют экстраполяции исходной последовательности нулевыми отсчетами или, как в АР модели, ненулевыми. Благодаря ненулевой экстраполяции при нахождении СПМ достигается высокое разрешение. Так же отсутствуют боковые лепестки свойственные классическим методам спектральной оценки возникающие в результате наложения окна на исходную временную последовательность.
Процедура нахождения коэффициентов авторегрессии, основанная на минимизации среднего значения квадратов ошибок предсказания вперед и назад по методу наименьших квадратов, называется модифицированным ковариационным методом. Быстрый алгоритм нахождения коэффициентов ModCovar взят из [9]. Существуют и другие процедуры нахождения коэффициентов, но они обладают менее удовлетворительными параметрами. Им свойственно расщепление спектральных линий при неправильном выборе порядка АР-модели. При использовании модифицированного ковариационного метода расщепление спектральных линий не наблюдается даже тогда, когда в других методах оно есть. На Рис.2 приведен пример сигнала отраженного от неподвижного человека находящегося за кирпичной стеной.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
