
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 519.714.24 + 681.51
А. Ю. КУСТОВ
ИПУ РАН, Москва
СИНТЕЗ ФИЛЬТРА, ФОРМИРУЮЩЕГО ГАУССОВСКУЮ ОКРАШЕННУЮ
ПОСЛЕДОВАТЕЛЬНОСТЬ С НЕНУЛЕВЫМ МАТЕМАТИЧЕСКИМ ОЖИДАНИЕМ,
ПО ЗАДАННОМУ УРОВНЮ СРЕДНЕЙ АНИЗОТРОПИИ
Для моделирования динамики объекта управления с входными возмущениями из определенного класса необходимо иметь генератор данного типа возмущения. В работе рассмотрена задача синтеза формирующего фильтра, допускающего представление в виде мультиплексного соединения нескольких фильтров меньшей размерности, и генерирующего последовательность гауссовских случайных векторов с ненулевым математическим ожиданием и заданным уровнем средней анизотропии. Приведен численный пример – при наличии в соединении одного одномерного фильтра.
Введение
Анализ систем, описывающих объект управления, синтез регуляторов для них, а также моделирование их динамики невозможны без учета класса входных возмущений, действующих на объект. В классической H2/LQG-теории управления в качестве входных возмущений рассматривается гауссовский белый шум, но в реальных ситуациях входные воздействия могут отличаться от него. Для описания меры отличия сигналов от заданного (эталонного) используют различные подходы и понятия.
В анизотропийной теории управления в качестве меры отличия используется понятие относительной энтропии, которая характеризует различие между некоторым случайным вектором (элементом входной последовательности) и случайным вектором со стандартным нормальным распределением (эталонным вектором) [1,2]. При малых значениях уровня неопределенности входное возмущение «близко» к гауссовскому белому шуму, при больших значениях класс входных возмущений «увеличивается».
Предлагаемый доклад посвящен задаче синтеза формирующего фильтра, генерирующего последовательность гауссовских случайных векторов с ненулевым средним, по заданному уровню средней анизотропии – характеристике неопределенности.
Синтез формирующего фильтра
Предварительные сведения
Для описания различия сигналов (или меры неопределенности) в теории информации используется понятие относительной энтропии [1,2]. Относительной энтропией случайного m-мерного вектора W с плотностью вероятности f относительно случайного m-мерного вектора V с плотностью вероятности g называют число
D(f||g)≜Elnfg=Rm fxlnf(x)g(x)dx1…dxm, (1)
где принято соглашение 0ln0=0.
Если в качестве функции g выбрать
gx=pm,λx=2р-m2exp-xTxλ, (2)
а в качестве функции f будет выступать
fx=2рm|Σ|-12exp-x-µTΣ-1x-µ, (3)
где µ - среднее значение вектора W, а Σ - его ковариационная матрица, то формула для относительной энтропии будет иметь вид
D(f|pm,λ=Elnf-m2ln2рλ+trΣ+µ22λ. (4)
Анизотропией случайного вектора W называют его минимальную меру отличия (относительную энтропию) от векторов из множества
pm,λx|λ>0, (5)
т. е.
AW=minλ>0D(f|pm,λ=-12ln detmΣtrΣ+µ2. (6)
Средней анизотропией последовательности wk m-мерных случайных векторов называют предел усреднения
AW=limN→∞AW0:N-1N, (7)
где
W0:N-1=w0…wN-1. (8)
- так называемый расширенный вектор последовательности.
Теорема 1. Пусть формирующий фильтр, генерирующий векторы ![]()
![]() последовательности, имеет вид
последовательности, имеет вид
![]()
![]() (9)
(9)
где матрица A – асимптотически устойчивая, т. е. ![]()
![]() , матрица D – невырожденная, и
, матрица D – невырожденная, и ![]()
![]() . Тогда средняя анизотропия последовательности
. Тогда средняя анизотропия последовательности ![]()
![]() равна
равна
![]()
![]() (10)
(10)
где матрицы Σ и Ξ связаны с решениями P и R уравнений Ляпунова и Риккати формулами:

 (11)
(11)
Постановка и решение задачи
Пусть задан уровень средней анизотропии (7) последовательности, сгенерированной фильтром (9) при постоянном среднем ![]()
![]() . Требуется найти множество матриц A, B,C, D фильтра и вектор
. Требуется найти множество матриц A, B,C, D фильтра и вектор ![]()
![]() , удовлетворяющих (10),(11), и допускающих некоторую параметризацию.
, удовлетворяющих (10),(11), и допускающих некоторую параметризацию.
В случае если размерность векторов последовательности равна m=1, матрица A фильтра – скалярная, ![]()
![]() ,
, ![]()
![]() то при обозначениях
то при обозначениях ![]()
![]()
![]()
![]() уравнения (10),(11) Теоремы 1 примут вид
уравнения (10),(11) Теоремы 1 примут вид
![]()
![]() (12)
(12)
![]()
![]() (13)
(13)
![]()
![]() (14)
(14)
![]()
![]() (15)
(15)
![]()
![]() (16)
(16)
а уравнение Риккати перепишется в виде
![]()
![]()
![]()
![]() (17)
(17)
Уравнение (17) можно привести к квадратному уравнению относительно переменной ![]()
![]() с положительным дискриминантом путем умножения слева на
с положительным дискриминантом путем умножения слева на ![]()
![]() и справа на
и справа на ![]()
![]() . Таким образом, после всех преобразований, его решение имеет вид
. Таким образом, после всех преобразований, его решение имеет вид
![]()
![]() (18)
(18)
где ![]()
![]() Таким образом, в случае
Таким образом, в случае ![]()
![]() и
и ![]()
![]() уровень средней анизотропии связан с коэффициентами фильтра соотношениями
уровень средней анизотропии связан с коэффициентами фильтра соотношениями
![]()
![]() (19)
(19)
где
![]()
![]() (20)
(20)
![]()
![]() (21)
(21)
![]()
![]() (22)
(22)
Фиксируя 3 неизвестных из 4х, получаем одно алгебраическое уравнение относительно одного неизвестного.
Решение общего случая достигается с помощью приема сведения части формирующего фильтра к одномерному. Пусть матрицы A, B,C, D фильтра – блочно-диагональные, т. е.
 (23)
(23)
т. е. система (9) заменится на r систем меньшей размерности:
![]()
![]() (24)
(24)
В этом случае уравнение для средней анизотропии представимо в виде
![]()
![]() (25)
(25)
где матрицы ![]()
![]() и
и ![]()
![]() выражаются через решения
выражаются через решения ![]()
![]() и
и ![]()
![]() соответственно уравнений Ляпунова и Риккати:
соответственно уравнений Ляпунова и Риккати:

 (26)
(26)
При m>1 и описанном выше блочно-диагональном представлении матриц A, B,C, D формирующего фильтра ![]()
![]() блоков из r являются скалярными, то для средней анизотропии возможно следующая запись:
блоков из r являются скалярными, то для средней анизотропии возможно следующая запись:
![]()
![]() (27)
(27)
где
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() (28)
(28)
![]()
![]()
![]()
![]() (29)
(29)
![]()
![]()
![]()
![]() (30)
(30)
Пример
Для иллюстрации описанного метода построим формирующий фильтр, генерирующий 3-мерные случайные векторы гауссовской последовательности со средней анизотропией ![]()
![]() и допускающего представление
и допускающего представление
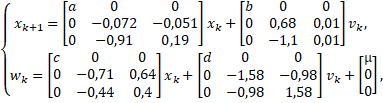
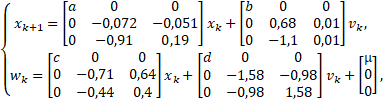 (31)
(31)
с неизвестными a, b,c, d,µ.
Для получения формулы для нахождения матожидания по известным матрицам фильтра раскроем (27):
![]()
![]() (32)
(32)
Фиксируя в качестве a, b,c, d величины ![]()
![]() ,
, ![]()
![]() ,
, ![]()
![]() ,
, ![]()
![]() (данный набор не является единственным, и служит лишь для демонстрации), получим
(данный набор не является единственным, и служит лишь для демонстрации), получим ![]()
![]() .
.
С учетом найденных коэффициентов a, b,c, d,µ и с помощью замен
 (32)
(32)
 (33)
(33)
в которых первая матрица – любая невырожденная, а вторая – унитарная, перепишем формирующий фильтр (31) в виде
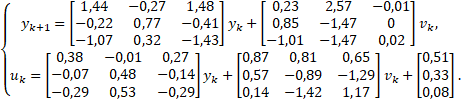
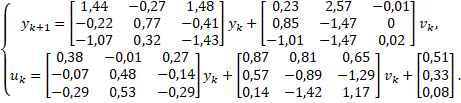 (34)
(34)
Данный формирующий фильтр генерирует последовательность гауссовских случайных векторов заданной размерности m=3 с уровнем средней анизотропии ![]()
![]() . Кроме того, он лишен исходного недостатка, заключающегося в блочно-диагональном представлении его матриц.
. Кроме того, он лишен исходного недостатка, заключающегося в блочно-диагональном представлении его матриц.
Результаты моделирования – генерации последовательности 3-мерных гауссовских случайных векторов с помощью фильтра (34) – представлены на рис.1.
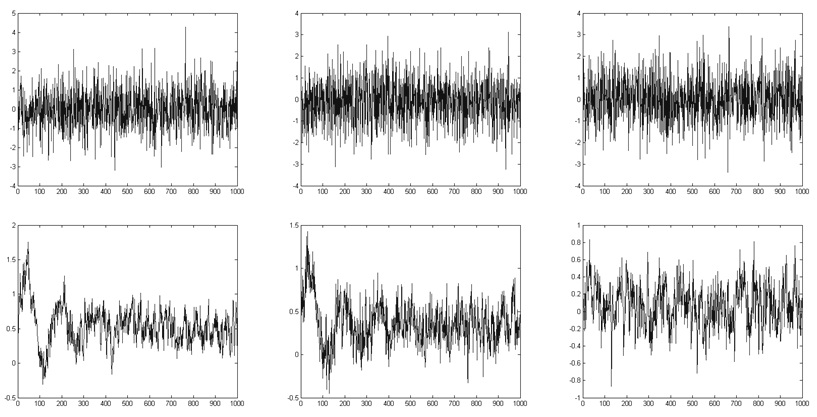
Рис.1. Входной гауссовский белый шум (сверху) и выходная окрашенная последовательность с уровнем средней анизотропии ![]()
![]() (снизу).
(снизу).
Заключение
В работе приведен метод синтеза формирующего фильтра, генерирующего гауссовские окрашенные последовательности с ненулевым математическим ожиданием. Указанный метод заключается в представлении фильтра в виде мультиплексного соединения фильтров меньших размерностей, хотя бы один из которых имеет размерность ![]()
![]() .
.
ЛИТЕРАТУРА
A. V.Semyonov, I. G.Vladimirov and A. P.Kurdyukov. Stochastic approach to H∞-optimization. Proc. Of the 3rd Conference on Decision and Control, USA, 1994, Vol.3, pp.2249-2250. I. G.Vladimirov, A. P.Kurdyukov and A. V.Semyonov. Anisotropy of Signals and the Entropy of Linear Stationary Systems. Doklady Math., 1995, Vol.51, pp.388-390.
Текст доклада согласован с научным руководителем (д. т.н., проф., ИПУ РАН)
Научный руководитель д. т.н., проф.
