

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
День 5 12.09.2014. 13:00-18:00.
Задачи | Ход работы |
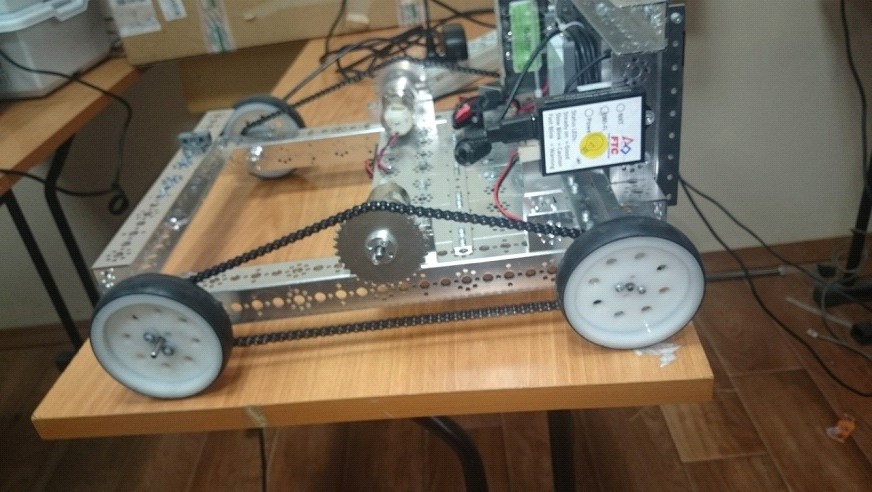
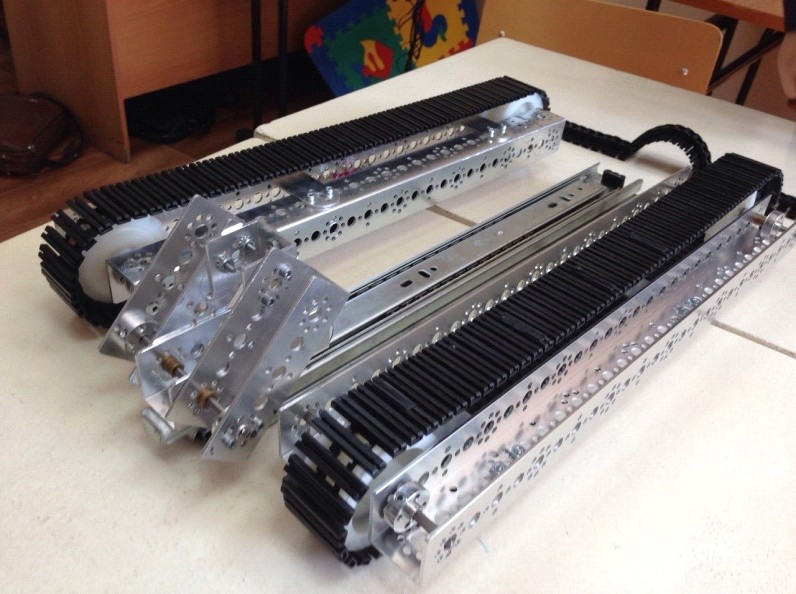
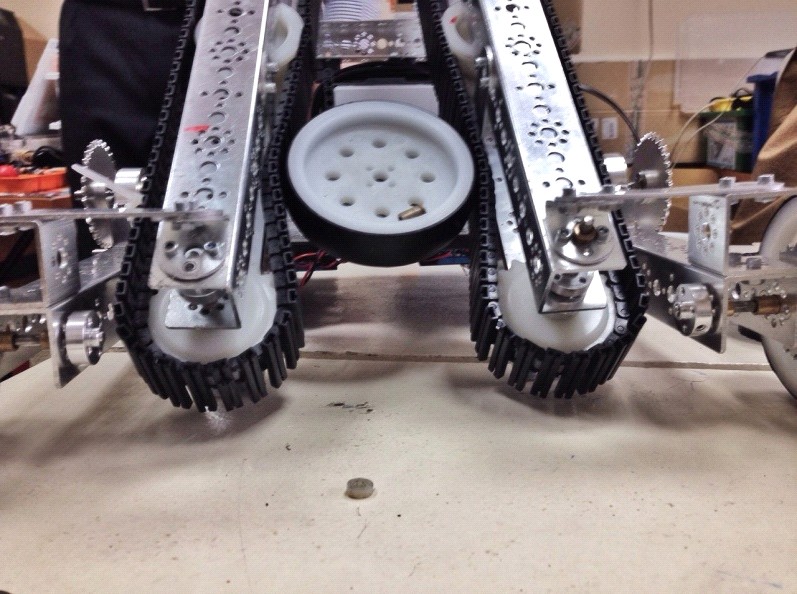
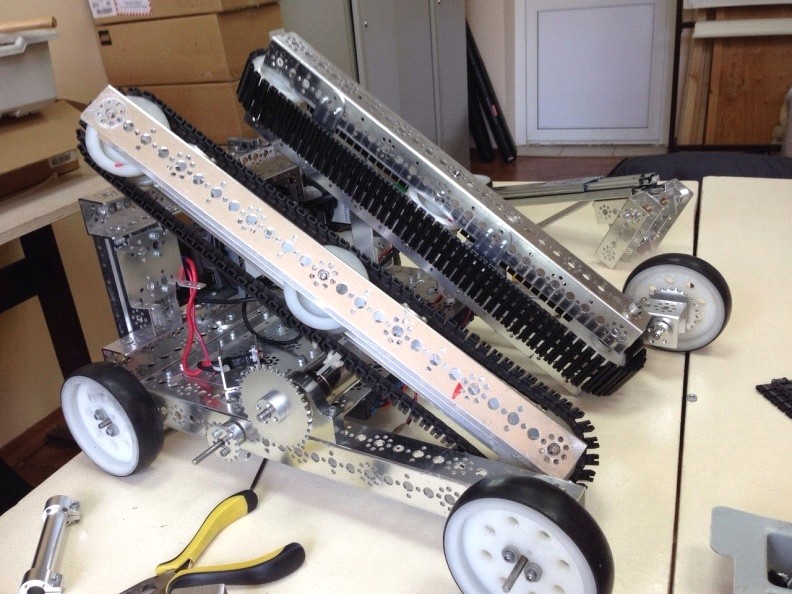
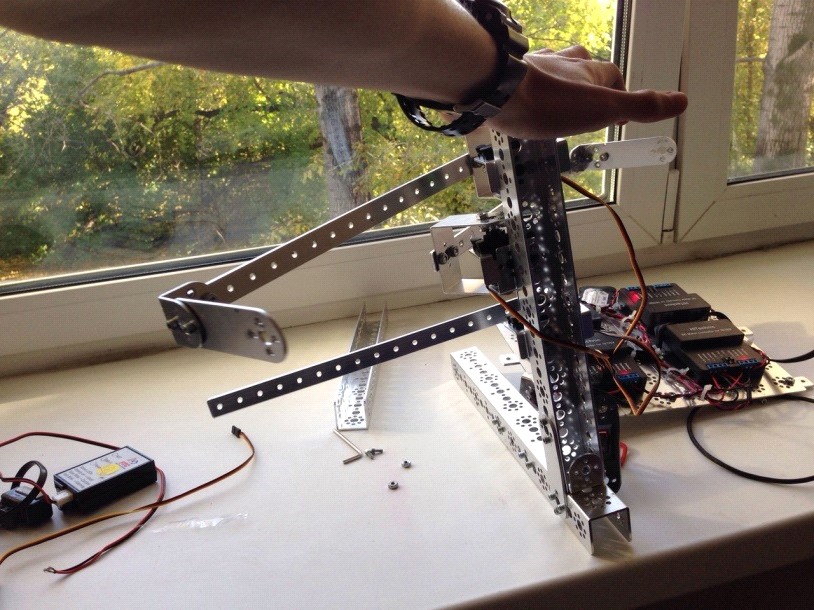
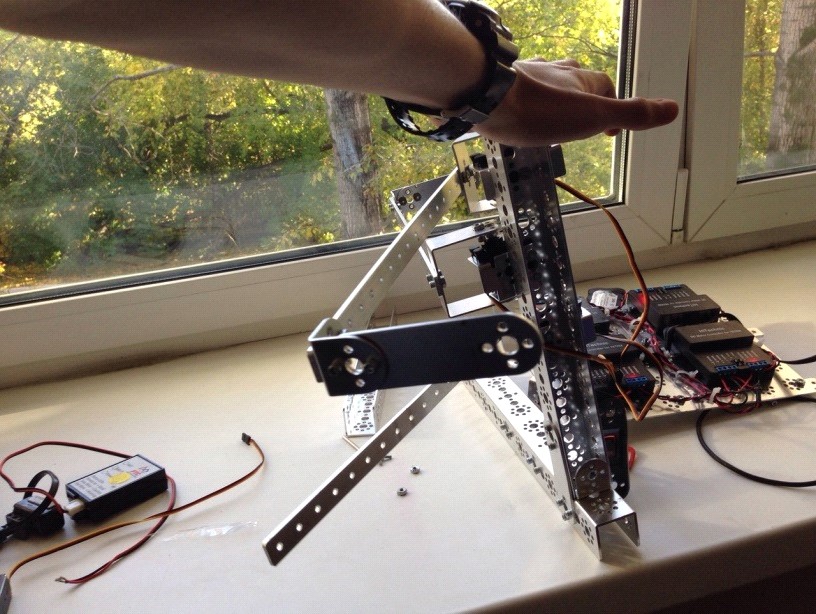
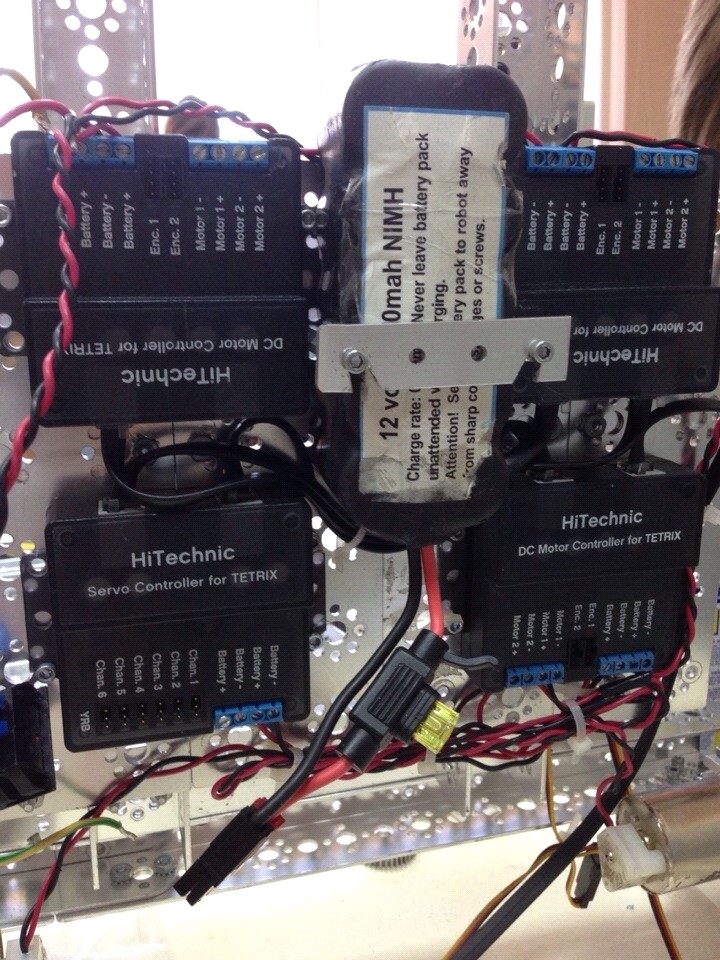
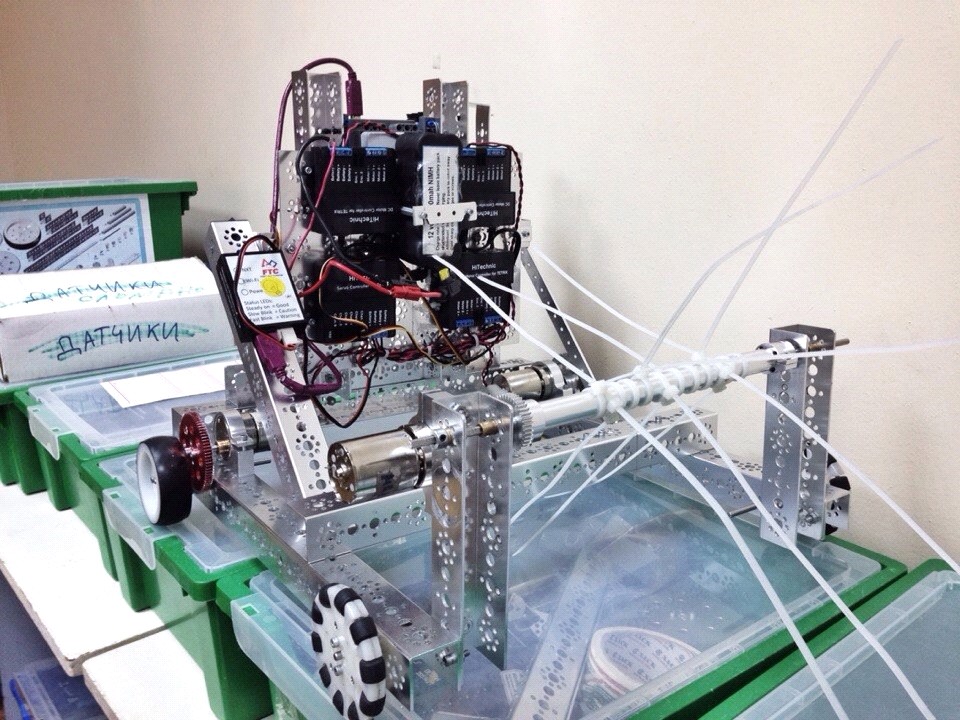
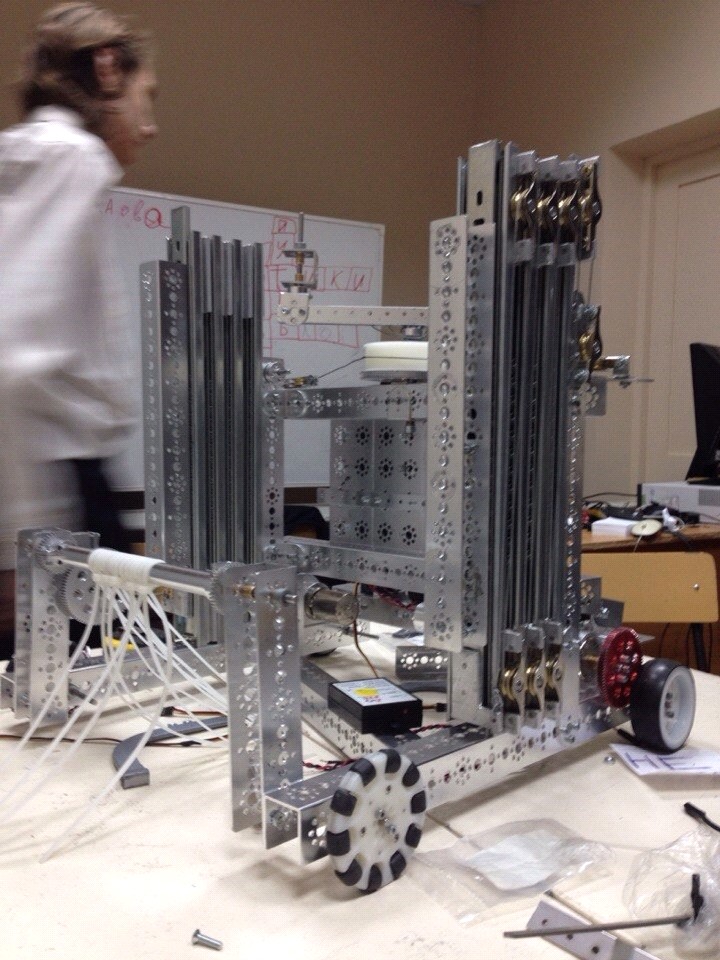
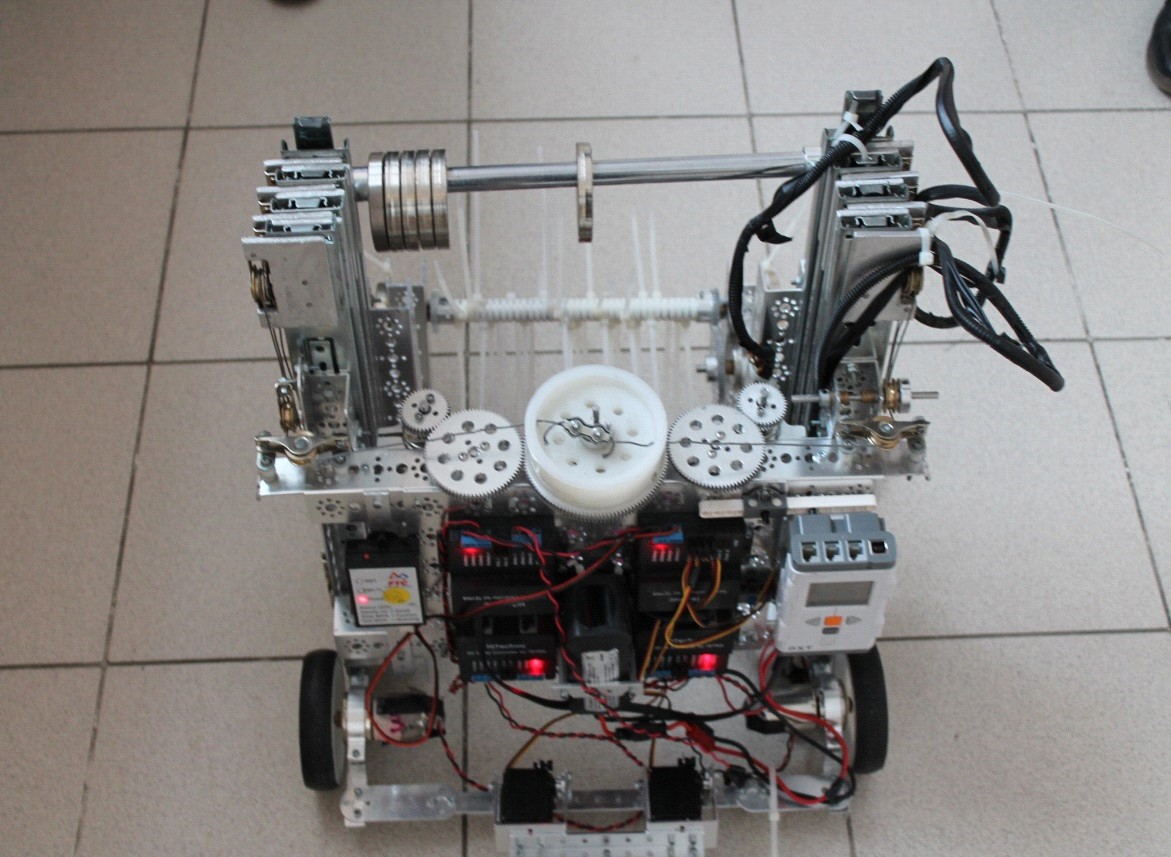
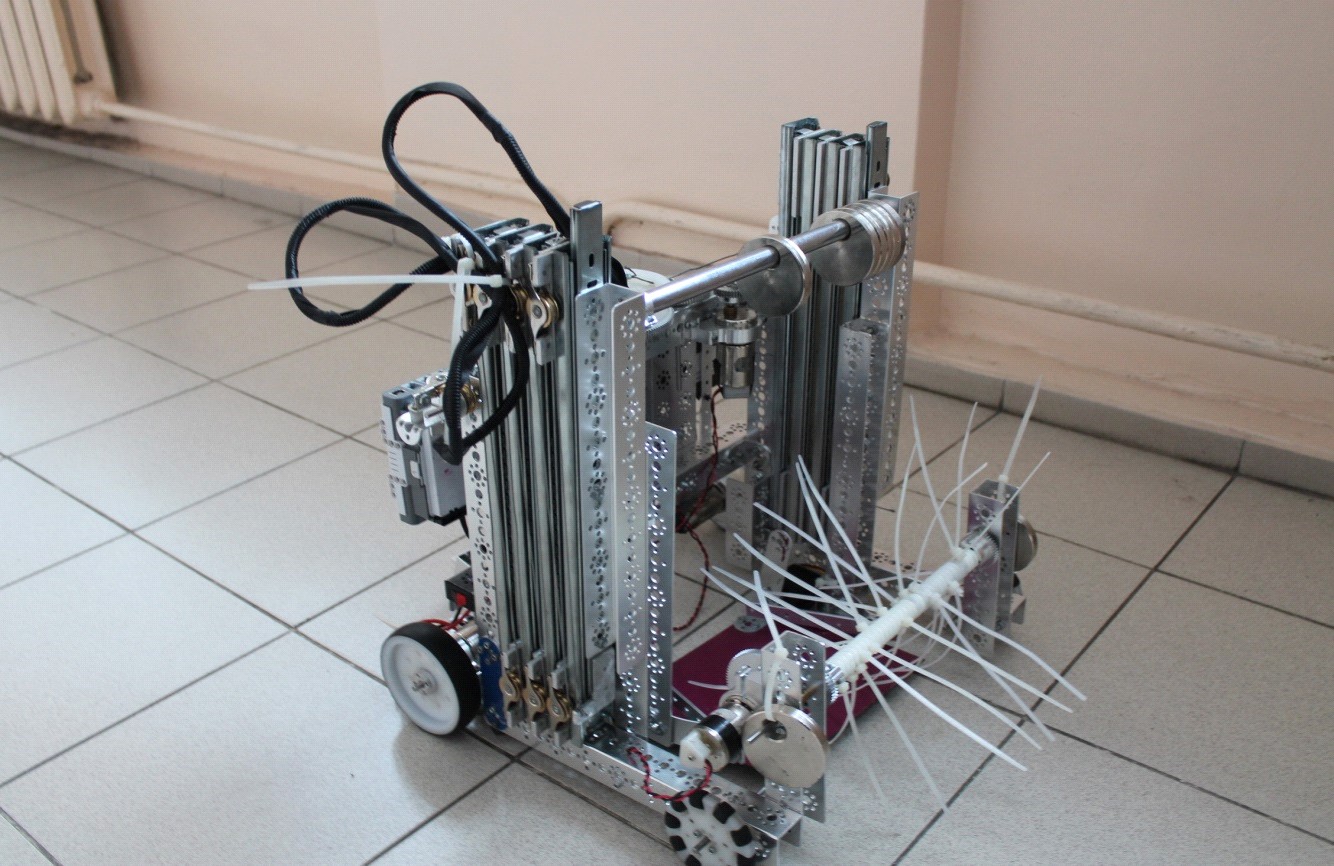
Создать новую модель платформы робота. | Мы начали создавать новую платформу для робота. Мы реконструировали нашу платформу и для защиты электроники разместили DC и Servo контроллеры под дном робота. В прошлых годах команды использовали гусеничный ход, но из-за недостатка моторов вы отвергли эту идею. Мы установили большие колеса и соединили их цепью. Это позволит роботу сохранить маневренность и большую скорость.
|

Шакин Кирилл
День 6 15.09.2014. 12:00-14:00.
Задачи | Ход работы |
Создать конвейер |
Сегодня мы сделали конвейр для нашего робота, который будет выдвигаться из исходного состояния робота. Он будет работать по принципу всасывания шариков и доставлять их наверх. |
Гребенюк Артем
День 7 19.09.2014. 13:00-14:00.
Задачи | Ход работы |
Сделать и установить конвейер |
Мы установили конвейер для нашего робота и проверили, как он работает, используя вместо шара колесо |
Тюпалов Вадим
День 8 21.09.2014. 14:00-16:00.
Задачи | Ход работы |
Создать механизм захвата шаров. Сделать измерения конструкции. | Мы решили использовать флипперы как механизм захвата, при этом управляться они будут независимо от самого конвейера.
|
Буков Георгий
День 9 28.09.2014. 14:00-17:00.
Задачи | Ход работы |
Изменить механизм захвата шаров. | Мы отказались от идеи с конвейером, потому что из-за него смещается центр тяжести. Когда мы проводили тест робота, он терял стабильность и падал, поэтому мы начали думать о другом способе захвата шаров. Также мы отказались от идеи использования флипперов. Наша новая идея заключается в создании механизма с хомутами. Также мы сделали замеры рамы робота. Мы будем делать ее не из деталей «Tetrix», а из алюминия. Это позволит использовать нам оставшиеся перфорированные швеллеры в других частях робота.
|

Юцис Роман
День 10 05.10.2014. 13:30-17:00.
Задачи | Ход работы |
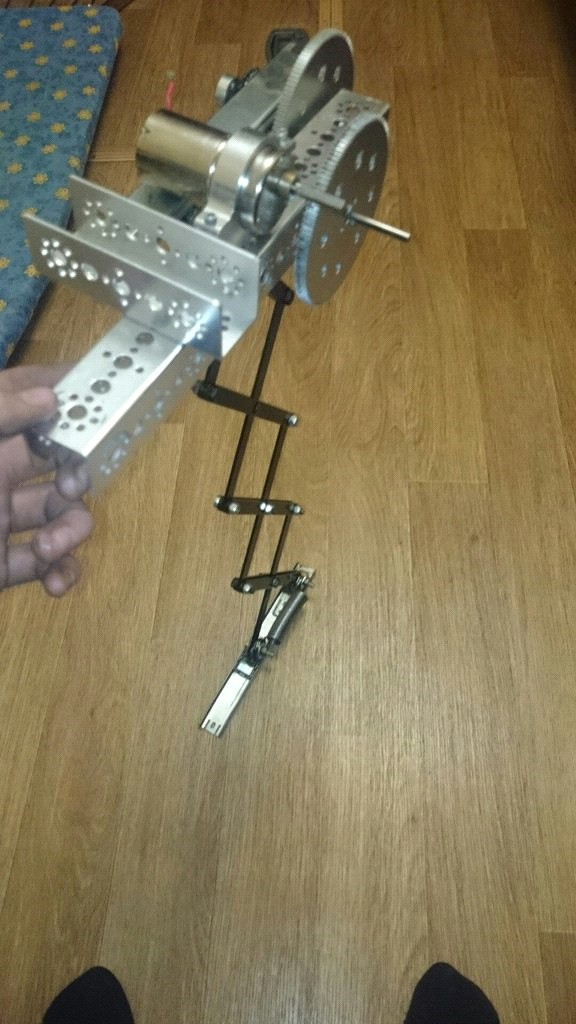
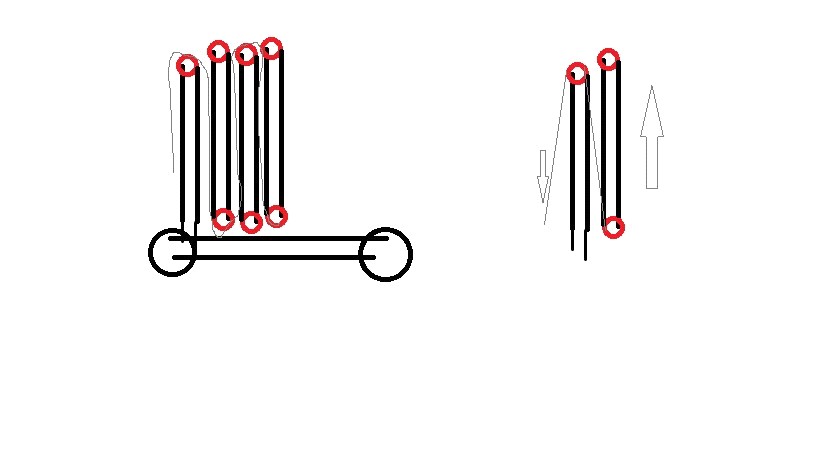
Создать пантограф |
После отказа от идеи с конвейером мы начали думать о путях доставки шаров на верх тубы и прекрасной идеей оказалось создание пантографа. Это позволило бы перемещать шары очень быстро с меньшими затратами энергии. |



Тюпалов Вадим
День 11 19.10.2014. 13:30-18:00.
Задачи | Ход работы |
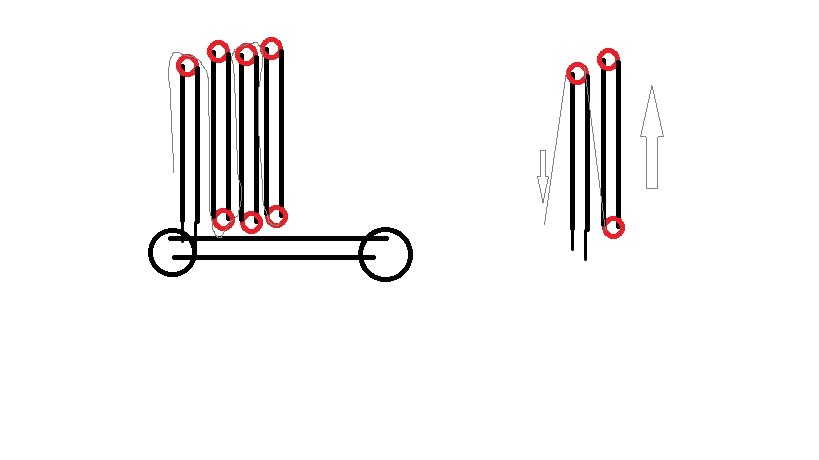
Доработать пантограф. |
Сегодня мы продолжили создавать пантограф |

Шакин Кирилл
День 12 19.10.2014. 13:30-18:00.
Задачи | Ход работы |
Изменить платформу |
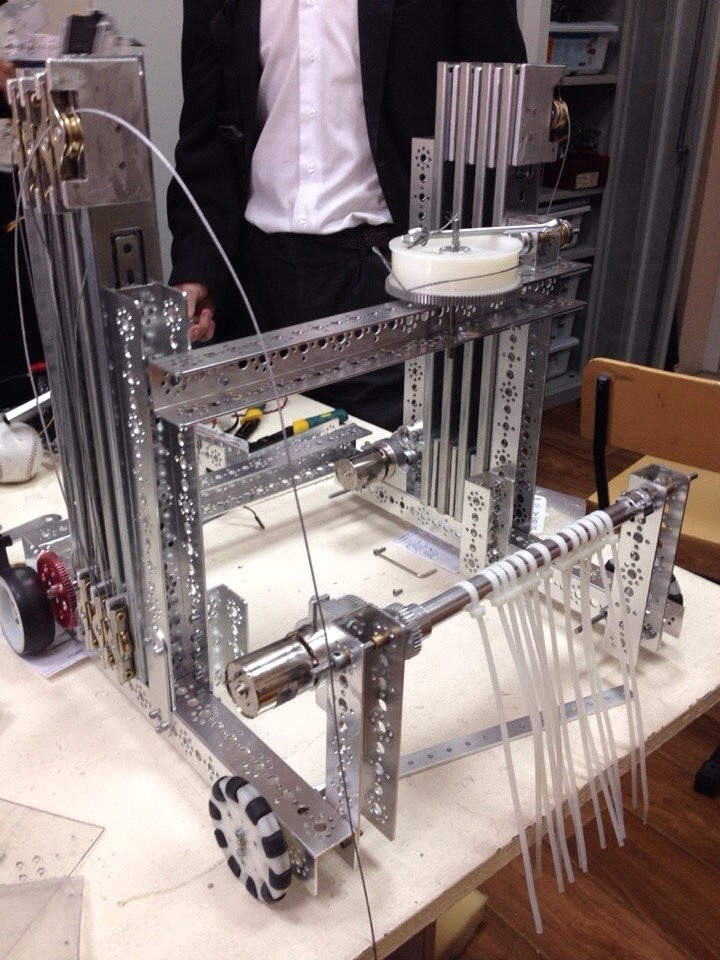
Когда мы решили использовать пантограф, то столкнулись с проблемой нехватки места — мы не могли установить все контроллеры DC и серводвигателей под роботом, поэтому было принято решение сменить их местоположение и поставить все на заднюю панель. |
Гаврилин Денис
День 13 19.10.2014. 13:30-18:00.
Задачи | Ход работы |
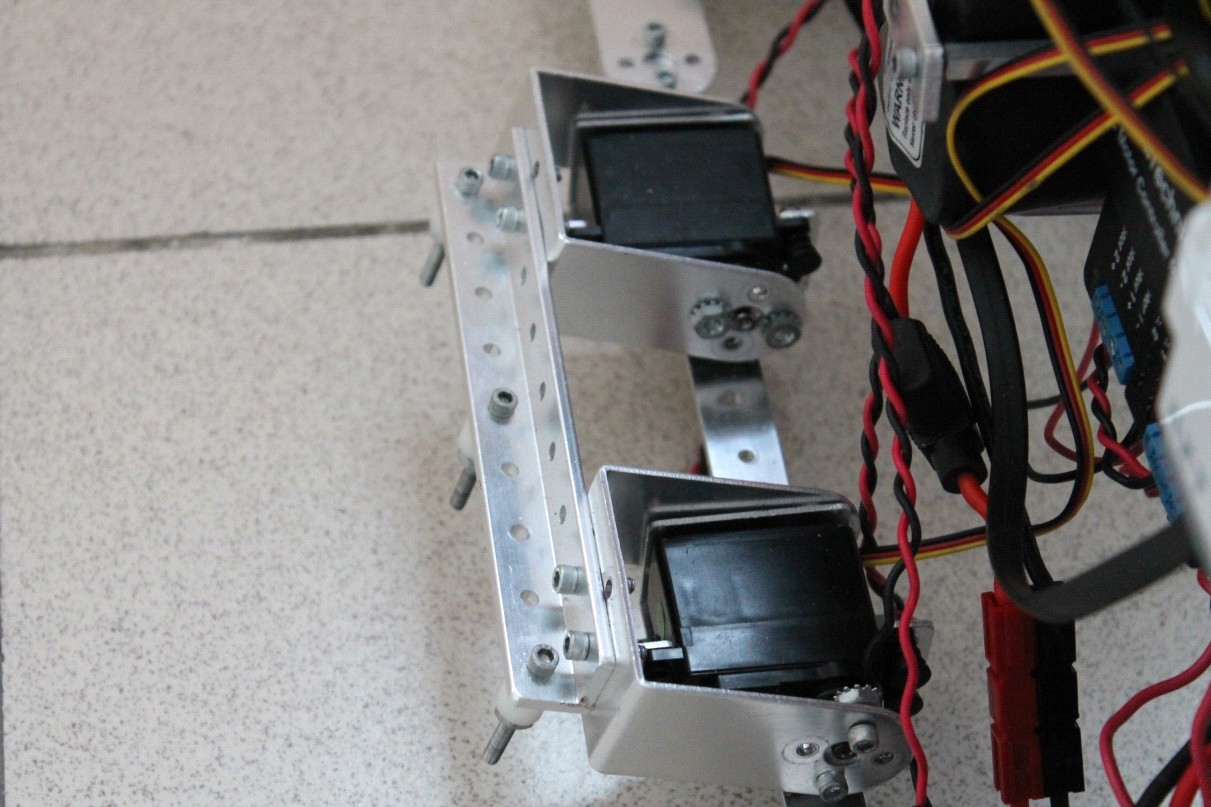
Установить механизм захвата |
Сегодня мы установили механизм захвата шаров в передней части робота, работающий от одного мотора |
Гребенюк Артем
День 14 26.10.2014. 14:30-18:00.
Задачи | Ход работы |
Улучшение платформы |
Мы продолжили менять положение контроллеров и улучшать мобильность нашей платформы. . |
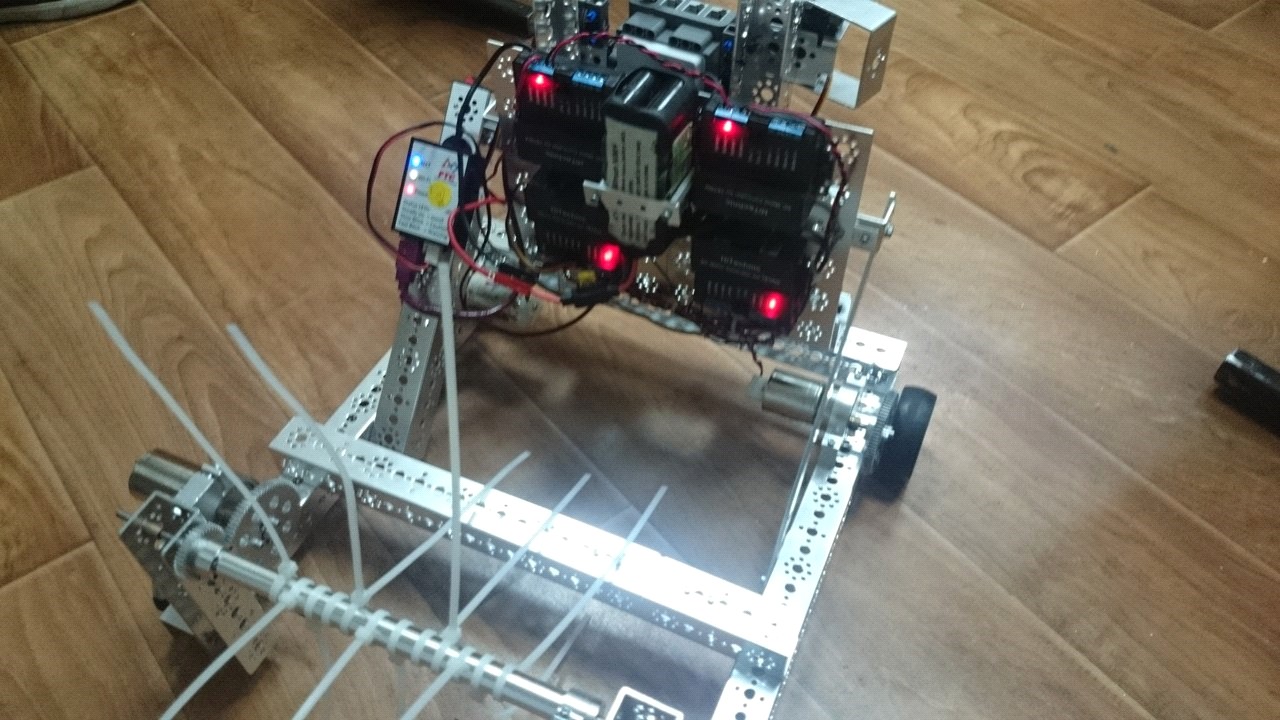
Гаврилин Денис
День 15 2.11.2014. 13:30-14:30.
Задачи | Ход работы |
Изменить систему доставки шаров. |
Мы считали, что идея с пантографом была действительно стоящей, но когда мы пытались протестировать ее, столкнулись с проблемой. Пантограф имел большую мощность, которая наносила ущерб роботу. Мы начали думать о замене и нашли ее. Она заключается в применении салазок, которые будут доставлять шары наверх, при этом используя 2 мотора. |
Юцис Роман
День 16 9.11.2014. 13:30-18:00.
Задачи | Ход работы |
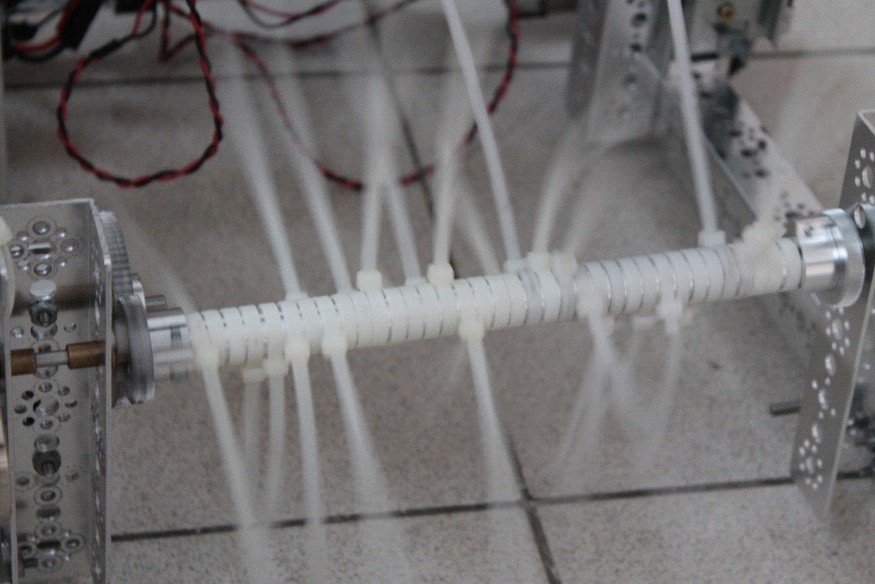
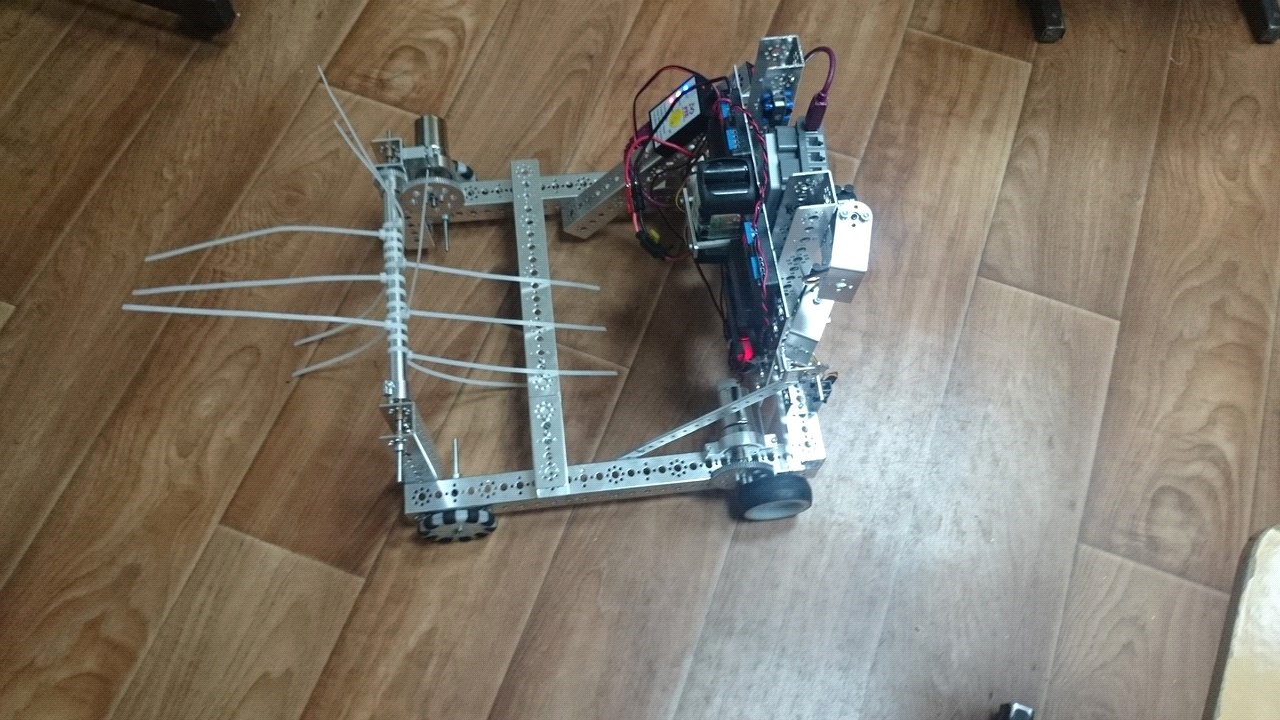
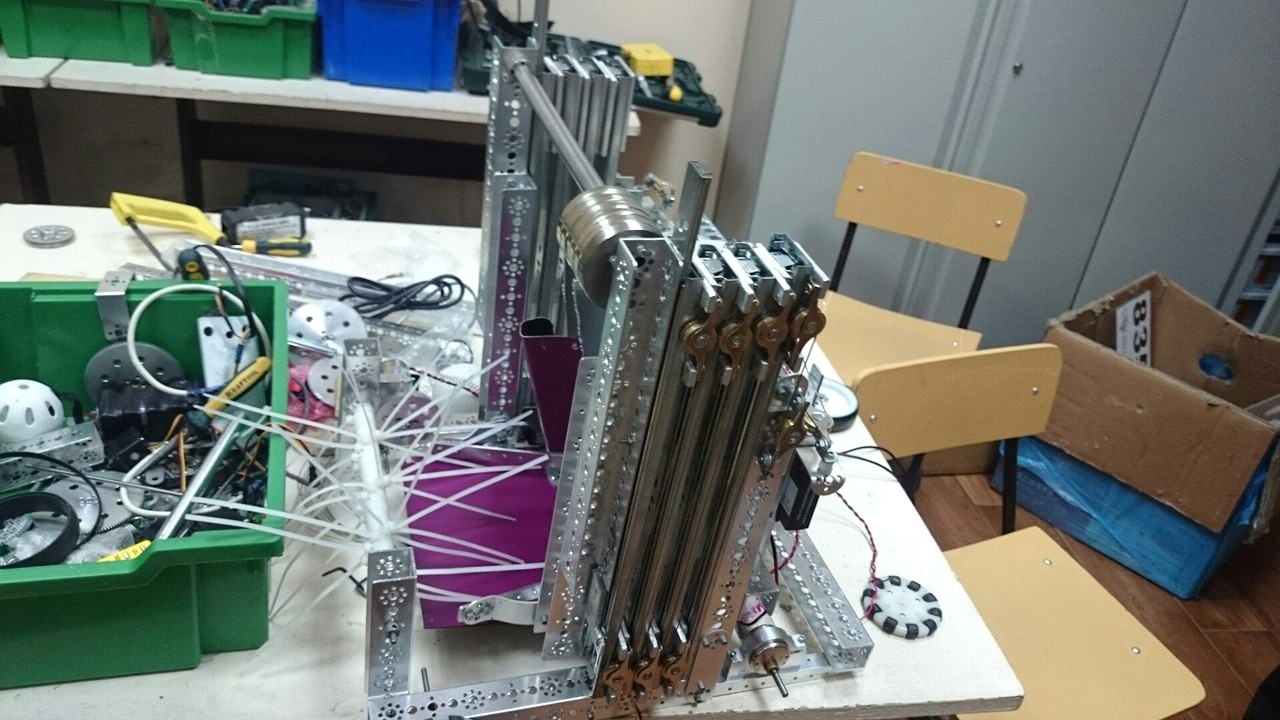
Воплощение идеи с салазками. | Мы начали делать салазки и первой проблемой стала проблема их размера, но нам удалось создали салазки нужного размера, который может увеличиваться до 135 см. Они используют один мотор и готовы к работе.
.
|
Гребенюк Артем
День 17 12.11.2014. 13:30-15:00.
Задачи | Ход работы |
Тестирование салазок. | Сегодня мы протестировали салазки, и их максимальная высота с роботом составила 190 см .
|

Тюпалов Вадим
День 18 15.10.2014. 14:30-17:00.
Задачи | Ход работы |
Создание ковша, тестирование робота, написание автономной части кода. |
По окончанию работы с салазками мы приступили к созданию ковша из пластика, который будет легким и прочным. Также начали писать код для автономной части соревнований. |
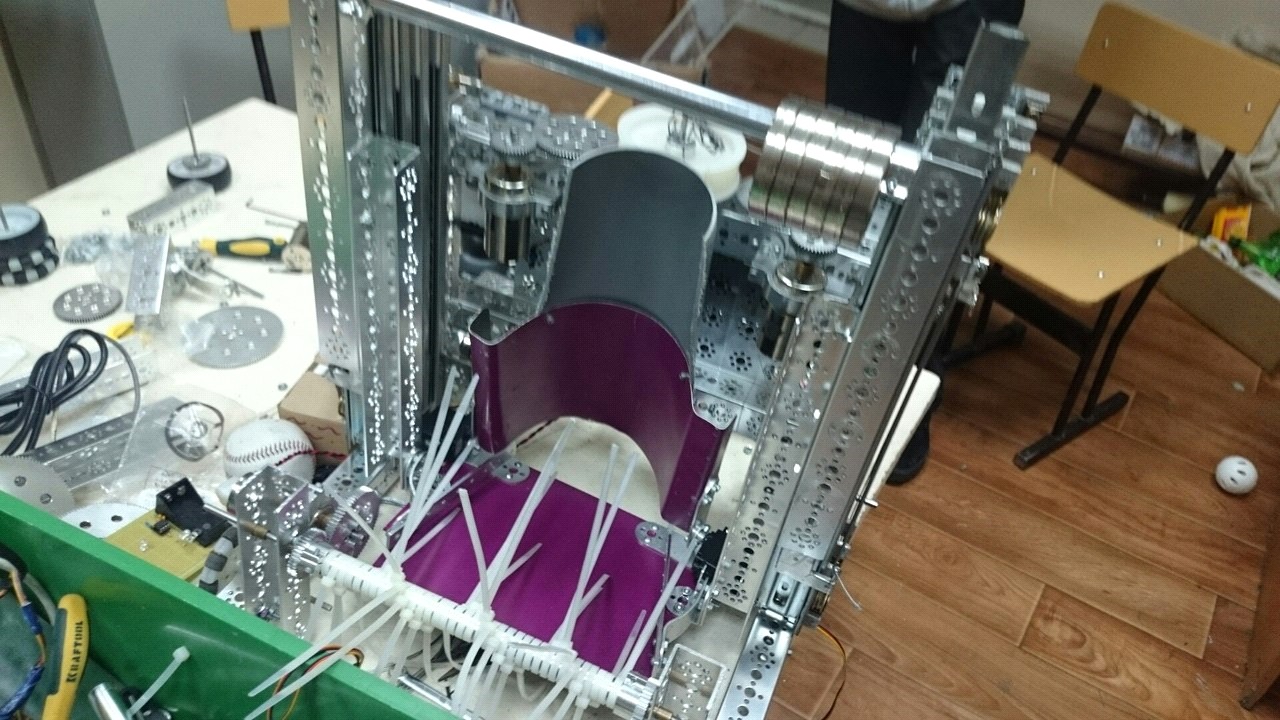
Шакин Кирилл
День 19 19.10.2014. 14:30-17:00.
Задачи | Ход работы |
Изготовление механизма захваты тубы. |
Когда мы сделали ковш для нашего робота, мы начали думать - как мы будем перемещать тубу и закидывать в нее шары? Мы изобрели механизм, который будет закрепляться в нижней части тубы и заставлять тубу следовать за роботом. |
Буков Георгий
День 20 20.10.2014. 14:30-17:00.
Задачи | Ход работы |
Исправление ошибок, тестирование робота. |
Сегодня мы исправили все ошибки в коде и проверили работоспособность робота. |
Тюпалов Вадим

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
