

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
День 21 22.11.2014. 13:30-18:00.
Задачи | Ход работы |
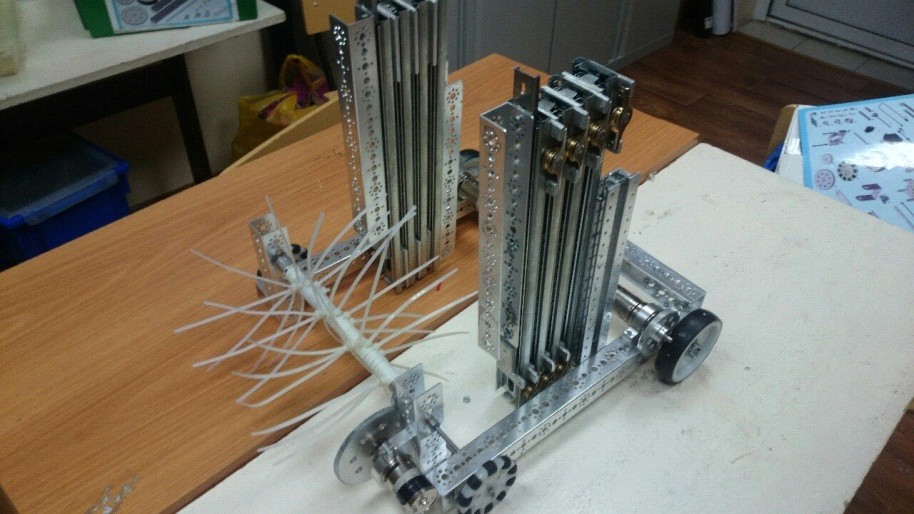
Тестирование робота, окончание работы над автономной частью. | Мы закончили сборку нашего робота. Сейчас он полностью готов к управлению со стороны игрока и почти написан код для автономной части
. |

Гаврилин Денис
День 23 26.10.2014. 16:00-18:00.
Задачи | Ход работы |
Подготовить робота для транспортировки. | Сегодня мы упаковали нашего робота и провели ревизию деталей. Теперь Мы готовы отправляться на 1 этап - РобоСиб. |
Юцис Роман
Тактика Игры
Существует 2 версии автономного режима. 1 - когда робот съезжает с рампы и закидывает шарики в трубу. 2 – когда он стартует с поля и опрокидывает несущую балку, удерживающие шарики в контейнере.
После этого наступает этап управляемого периода, в которой очень важно определиться с тактикой на игру. Наша тактика заключается в захвате трубы за ее основание и ведение за роботом. Параллельно мы будем собирать шары в ковш и с помощью салазок поднимать его наверх. Затем, опрокидывая крышку ковша, мы будем скатывать шарики целенаправленно в трубу и начинать новый сбор. По окончанию времени с помощью захватывающего механизма мы перевезем трубу в парковочную зону, или мы продолжим собирать шарики и закидывать в тюб, который находится на высоте 120см. Также мы можем закатывать тюбы на рампу, что даст нам больше очков.
Таким образом, тактика позволяет нам подстраиваться под различных соперников. Также мы планируем договариваться с нашими союзниками по альянсу о разделении обязанностей во время игры.
Тюпалов Вадим
Итоги соревнований “Робосиб 2014”
Наши первые соревнования в новом составе прошли не самым удачным образом. Нашего робота постоянно замыкало на поле, и мы долго не могли устранить причину поломки. Мы проигрывали раунд за раундом только из-за неисправности в роботе. Таким образом, фестиваль не увенчался успехом для нашей команды, но, бесспорно, дал нам огромный опыт. Мы думали, что на этом все наши шансы упущены и нам не суждено ехать в Москву. Но мы ошибались. 24 января было решено провести дополнительный конкурс. И сейчас мы постараемся использовать все наши возможности, чтобы не упустить победу.
Юцис Роман
Новички в команде
Романов Александр | 10 | Учится в информационно-математическом классе. Увлекается информатикой, конструированием. В команде – инженер. |
|
Гришин Кирилл | 9 | Учится в информационно-математическом классе. Увлекается программированием, конструированием. В команде – инженер. |
|


Ильин Павел | 10 | Учится в информационно-математическом классе. Увлекается программированием, конструированием. В команде – програмист. |
|

День 24 04.01.2015. 10:00-12:00.
Задачи | Ход работы |
Новый год – время перемен | Мы учли все наши ошибки с предыдущих соревнований и решили полностью пересобрать робота. Мы сделаем его более прочным и надежным, а главное – устраним все неполадки с проводкой. Сегодня мы составили план, по которому подготовимся к новым соревнованиям. |
Шакин Кирилл
День 25 05.01.2015. 13:00-16:00.
Задачи | Ход работы |
Время сборки |
Сегодня мы приступили к сбору робота. Было решено оставить салазочную систему поднятия шариков, но мы несколько поменяли основной каркас робота, сделав его шире и длиннее. |

Гаврилин Денис
День 26 06.01.2015. 13:00-15:00.
Задачи | Ход работы |
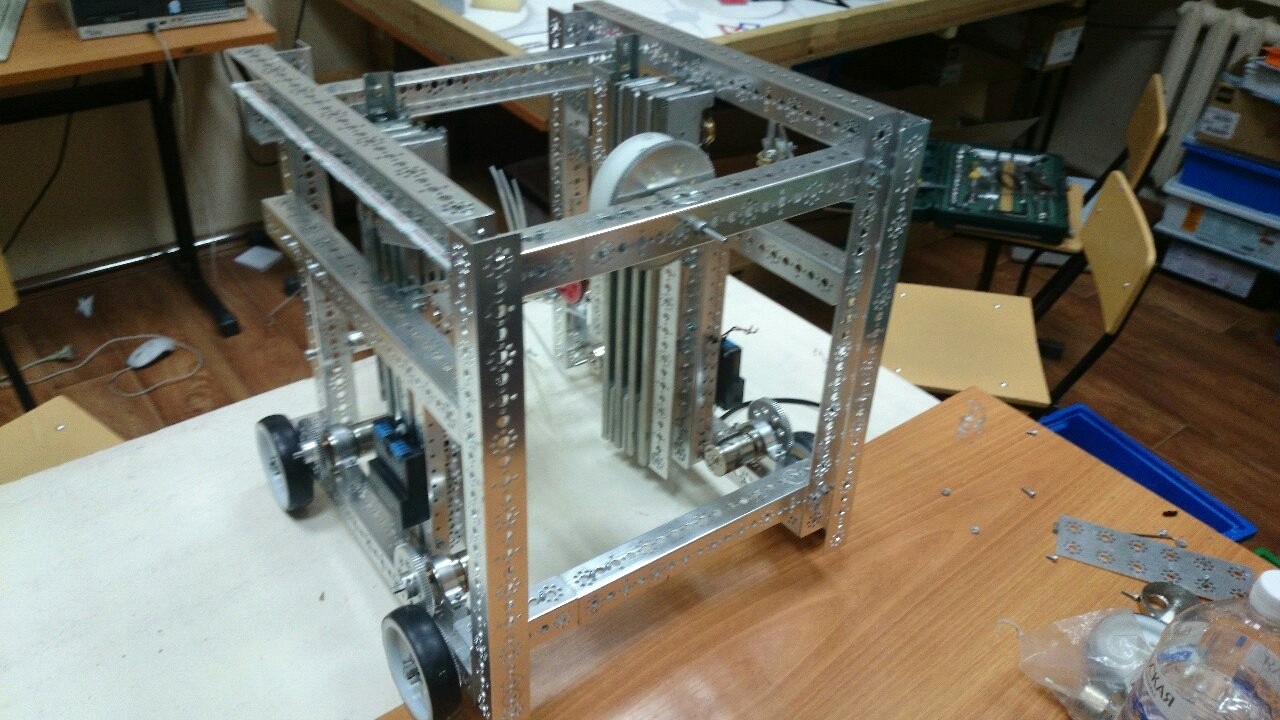
Есть каркас – нет проблем |
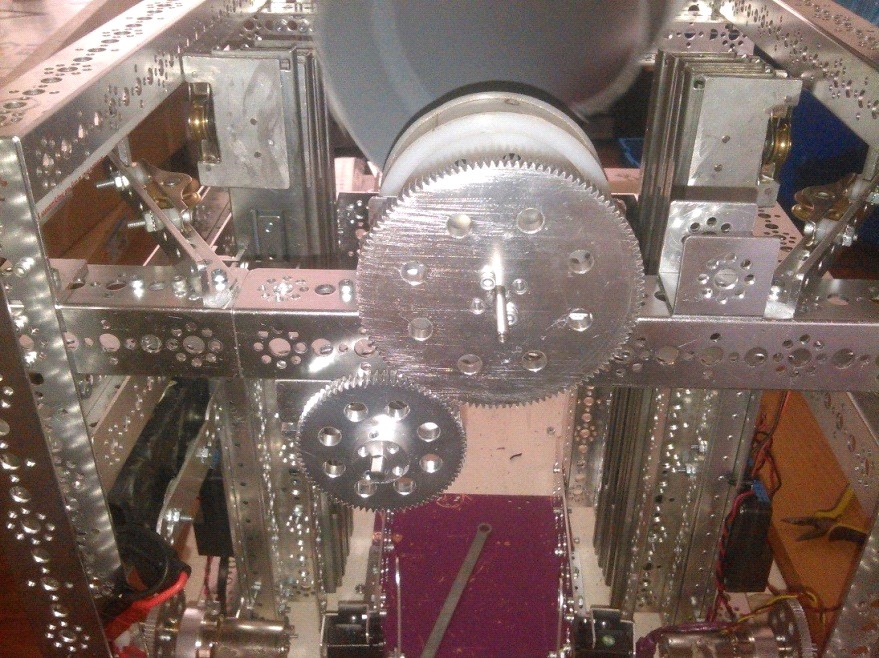
Сегодня мы завершили сборку основного каркаса нашего робота, добавив несущие опоры для подъемника. Также мы установили кольцо, на которое будет наматываться трос. |
Тюпалов Вадим
День 27 13.01.2015. 14:00-16:00.
Задачи | Ход работы |
Без ковша много не заработаешь |
Создать и установить ковш – работа несложная, но очень важно, чтобы он правильно работал. Поэтому мы уделили этому тщательное внимание и потратили на его закрепление и настройку салазок целый день. |
Юцис Роман
День 28 20.01.2015. 13:00-16:00.
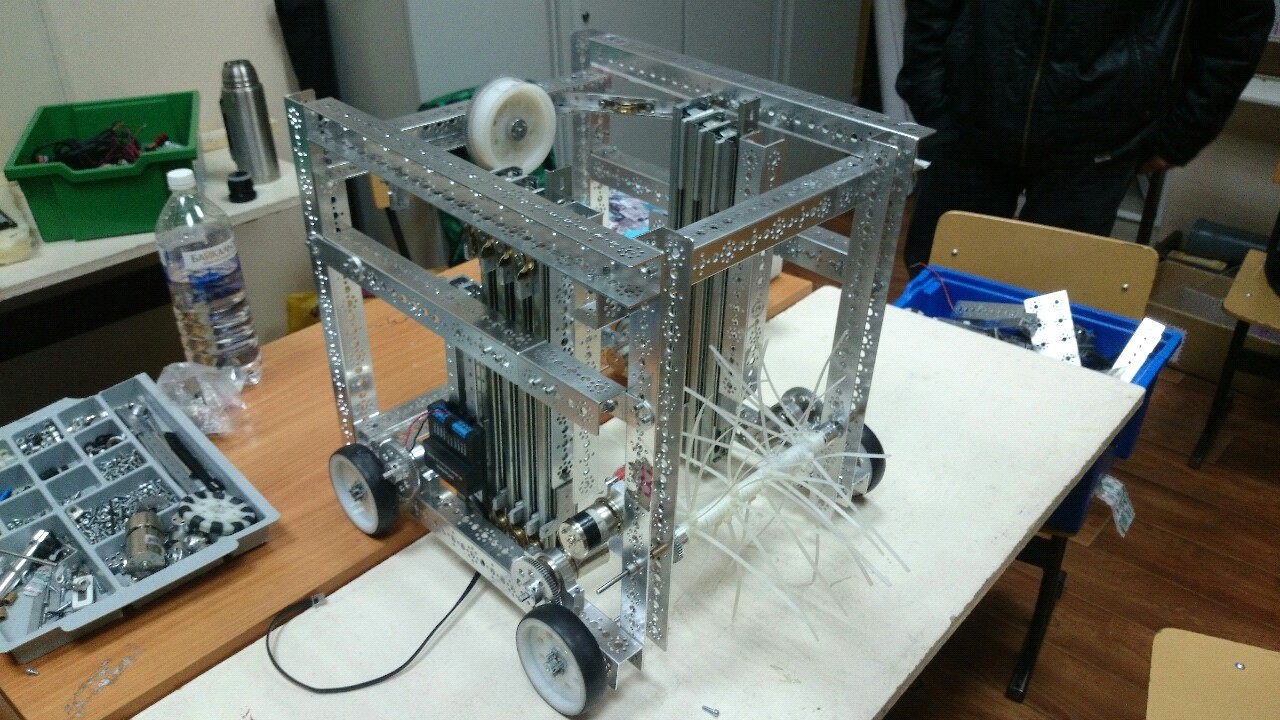
Моторов много не бывает Дабы обеспечить работу нашего робота, сегодня мы устанавливали всю проводку, моторы и блок питания с “LEGO Mindstorm” . Вот результат
|
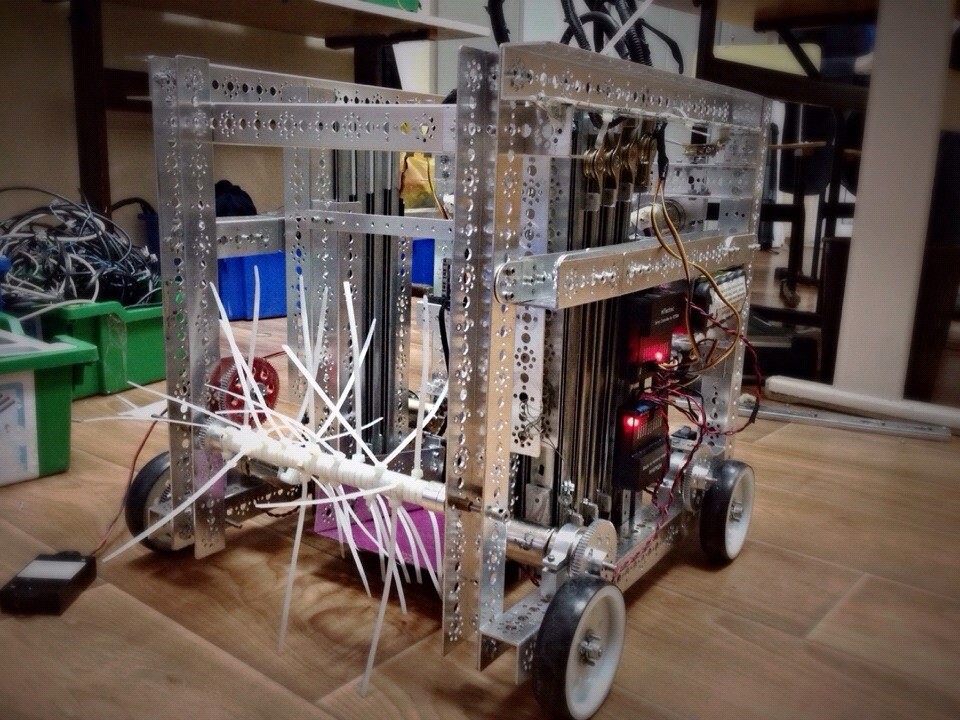
Тюпалов Вадим
День 29 21.01.2015. 13:00-15:00.
Задачи | Ход работы |
Автономный период – это круто | Сегодня мы устанавливали датчик, который будет отвечать за движение робота в сторону маяка. Мы придумали выдвигающуюся конструкцию, которая позволит поднять датчик повыше и обеспечит большую вероятность правильного считывания показаний маяка. |
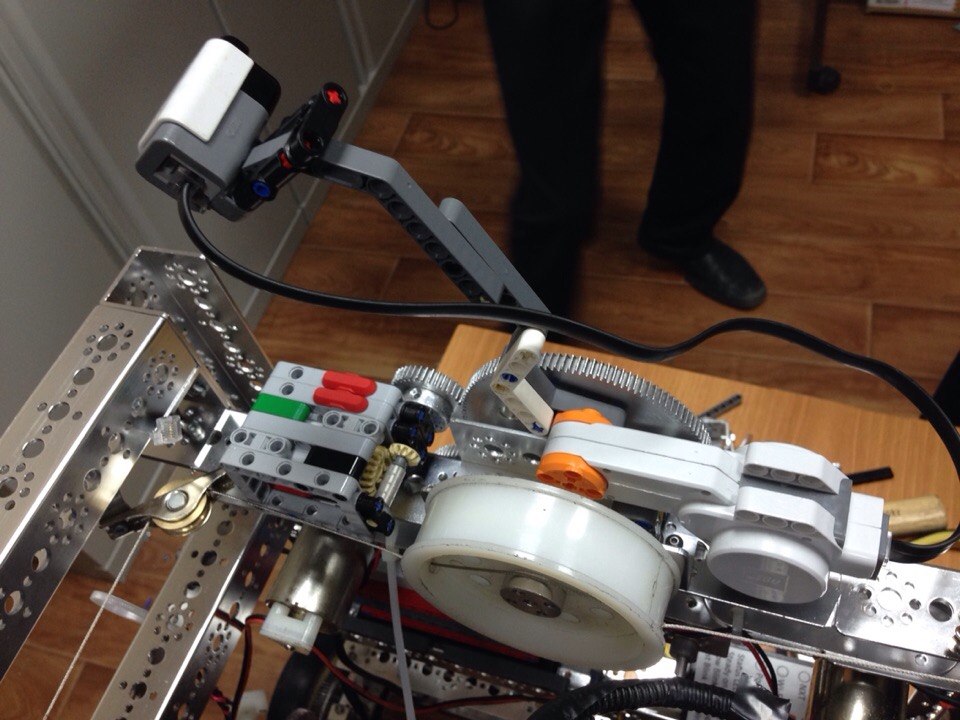
Шакин Кирилл
День 30 22.01.2015. 13:00-15:00.
Задачи | Ход работы |
Большой день тестов | “Не опробовав – не узнаешь”. Мы протестировали нашего робота на поле и пришли к выводу, что он неплохо справляется с возложенными на него обязанностями. Он отлично ездил по прямой и забирался на горку. Салазки растягивались во всю длину за 4 секунды. Это было прекрасно |
Гаврилин Денис
День 31 23.01.2015. 16:00-18:00.
Задачи | Ход работы |
Безопасность – превыше всего | Сегодня мы упаковали нашего робота и приготовились к завтрашним соревнованиям. Мы настроены, мотивированы и не упустим своего шанса зайти в вагон уходящего поезда. |
Юцис Роман
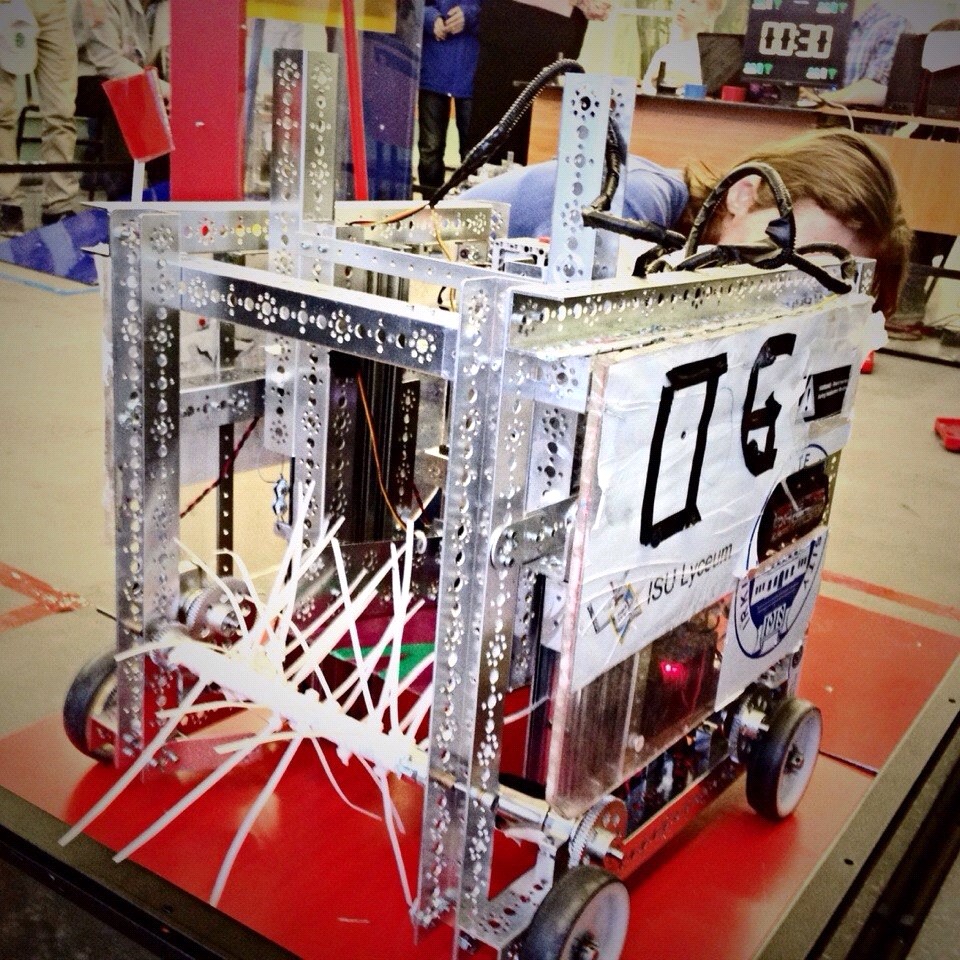
День игр
“Сейчас или Никогда”- эта фраза отчетливо раздавалась в наших головах весь день. Ставки были высоки. Первый бой. Мы вели в счете, но тут опрокидывается робот союзника. В одиночку выиграть тот раунд мы не смогли. Второй бой прошел в упорнейшей борьбе. Когда оглашали результаты, мы выяснили, что проиграли сопернику менее 20 очков. Было очень обидно, но мы понимали, что у нас еще есть шанс.
3 бой. Тотальный разгром команды соперника. Мы воодушевились нашей победой, а у ребят поднялось настроение. Мотивированные и настроенные только на выигрыш, мы вступили в 4 бой. К счастью, не произошло никаких поломок, и мы выиграли раунд.
Время выборов финальных альянсов. Нас выбрала команда FTC-7, являющаяся 2 лицейской командой. Если бы не они, мы могли бы вообще никуда не пройти. Против нас были серьезные соперники в лице FTC-2 и FTC-5. Понимая, что настало время, мы собрались и отыграли раунд. Это была лучшая партия, на нашего робота пришлось 390 очков, не говоря об альянсе. Мы осознали, что еще не все потеряно, и теперь мы отправляемся в Москву на “Робофест-2015”.
Тюпалов Вадим



|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
